基于无人机影像和高程数据的地形构造线确定方法
2021-10-20郑昕
郑 昕
(江苏地质测绘院, 江苏 南京 211102)
0 引言
在地形分析中,往往需要对地形特征点进行提取[1-2]。其中特征点包含鞍部点、山谷点、洼地点、山脊点、山顶点等[3-4]。只有精准提取特征点,才能精准地标识与提取地形特征线[5]。其中,关于山脊线和山谷线的提取研究对地形构造线的确定有着重要意义。对于地形构造线确定方法的研究,提出的方法众多。如有学者提出基于形态几何模拟技术的地形构造线确定方法,通过对地理要素的形态分析,对区域进行插值,构造地形模型;还有学者提出基于图像处理技术的地形构造线确定方法,规则格网数字高程模型数据视为灰度图像,高程值视为图像灰度值,利用栅格数据图像处理技术提取地形特征。由于这些现有方法存在图层提取误差较大的问题,因此,将无人机影像和高程数据应用在地形构造线的确定中,提出一种基于无人机影像和高程数据的地形构造线确定方法。
1 设计基于无人机影像和高程数据的地形构造线确定方法
1.1 高程数据获取
基于无人机影像和高程数据获取地形的高程数据,也就是通过无人机遥感系统对高程数据进行获取,该系统由地面监测模块、飞控模块、无人机遥感模块构成[6]。利用无人机遥感系统进行地形高程数据获取的具体步骤如下:
(1)对无人机航行路线进行规划[7]。首先需要检查相关内容,包括分区最大高差、区域覆盖情况等,然后才能根据实际情况对航行路线进行规划[8]。需要对地面分辨率以及像片重叠度进行验证。其中,地面分辨率的决定需要以测图比例尺为依据[9]。地面分辨率的计算公式具体如下:
(1)
式中,H低代表最低点摄区高程;H代表与摄影基准面相对的摄影航高;H基代表基准面摄影高程;D低代表地面最低分辨率;a代表像元尺寸;f代表镜头焦距[10]。像片重叠度的计算公式具体如下:
(2)
式中,p代表摄区最高位置对应的航向重叠度;q代表摄区最高位置对应的旁向重叠度;H高代表最高点摄区高程;px代表设定的航向标准重叠度;qy代表设定的旁向重叠度[11]。在像片重叠度的验证中,需要将像片重叠度的控制在60%~80%;旁向重叠度控制在30%~60%。
(2)质量控制点的布设,是以实际区域网为依据来布设图像控制点。从以下四方面控制图像控制点布设质量:控制网的设计、航飞分区与像控分区的对应情况、布局方案的实际有效控制范围、像控点的实际密度情况[12]。
(3)利用无人机遥感系统对地形高程数据进行采集,采集时要对无人机遥感系统进行精准控制,以获取精确的地形高程数据[13]。
1.2 数据预处理与转化
对获取的地形高程数据进行预处理,具体步骤包括图像灰度化、平滑处理、山轮廓提取以及将地形高程数据转化为坡度数据[14]。
1.2.1图像灰度化处理
使用的方法为加权平均法,具体计算公式如下:
f(x,y)=0.3R(x,y)+0.58G(x,y)+0.12B(x,y)
(3)
式中,f(x,y)代表灰度化后(x,y)处的图像灰度值;R(x,y)代表色彩R的分量值;G(x,y)代表色彩G的分量值;B(x,y)代表色彩B的分量值[15]。
1.2.2平滑处理
使用的方法是中值滤波,具体计算公式如下:
(4)
式中,g(x,y)代表(x,y)这一像元点滤波过后的灰度值;Med{}表示中值函数;f(x,y)代表(x,y)这一像元点的灰度值;Windows代表窗口模板的实际大小[16]。
1.2.3山轮廓提取
所使用的方法为边缘检测算法,具体步骤如下:利用高斯函数实施影像的滤波操作;对梯度的方向和大小进行计算;对梯度实施非极大值抑制;实施双阈值处理。
将地形高程数据转化为坡度数据,所使用的算法为D8算法,具体公式如下:
(5)
式中,P代表两个高程数据栅格间的坡降;Max()表示最大值函数;Z代表该点的高程数据;Zi代表该点邻域的八个栅格高程;i代表该点邻域栅格;D代表两个栅格单元的实际中心距离,当栅格单元间是坐标轴方向[17],则D的计算公式为
D=1×SCell
(6)
式中,SCell代表栅格。当栅格单元间是对角线方向时,D的计算公式为
(7)
则,数据转化结果具体如图1所示。
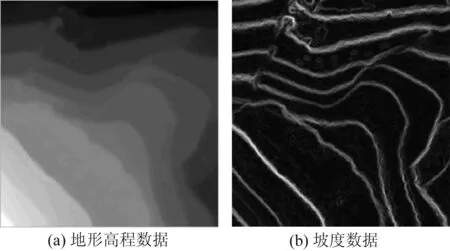
图1 数据转化结果
1.3 地形构造线确定
基于转化后的坡度数据对地形构造线进行确定,具体步骤包括提取山脊线,然后通过反地形思想提取山谷线。
提取山脊线具体步骤如下:(1)基于转化后的坡度数据对洼地进行提取,以洼地深度、洼地面积等洼地属性特征为依据初步识别真伪洼地;(2)通过美国陆地卫星4~5号专题制图仪影像对水体信息进行提取,包括水坝、水库等,并将其作为真洼地[18];(3)对提取的水体信息数据、洼地数据、原始坡度数据实施综合分析处理,利用填充、编程对伪洼地进行补充并保留真洼地,获取无洼地数字高程模型;(4)以此为基础,对汇流累积量于水流方向的对应矩阵进行计算,通过栅格计算器对汇流累积量栅格的实际零值进行计算,提取山脊线。
通过反地形思想提取山谷线,具体步骤如下:选择较大的一个高程值,利用其与原始高程数据相减,获取的结果与原始高程数据相反,即为提取的山谷线。由此,完成地形构造线确定方法的设计。
2 地形构造线确定实验验证
2.1 实验方法设计
选取江苏连云港锦屏山某区域作为实验对象,采用引言所述的基于形态几何模拟技术和基于图像处理技术的地形构造线,确定两种传统方法进行作为对比组,利用无人机遥感系统对获取该研究区域的高程数据,结果如图2所示。
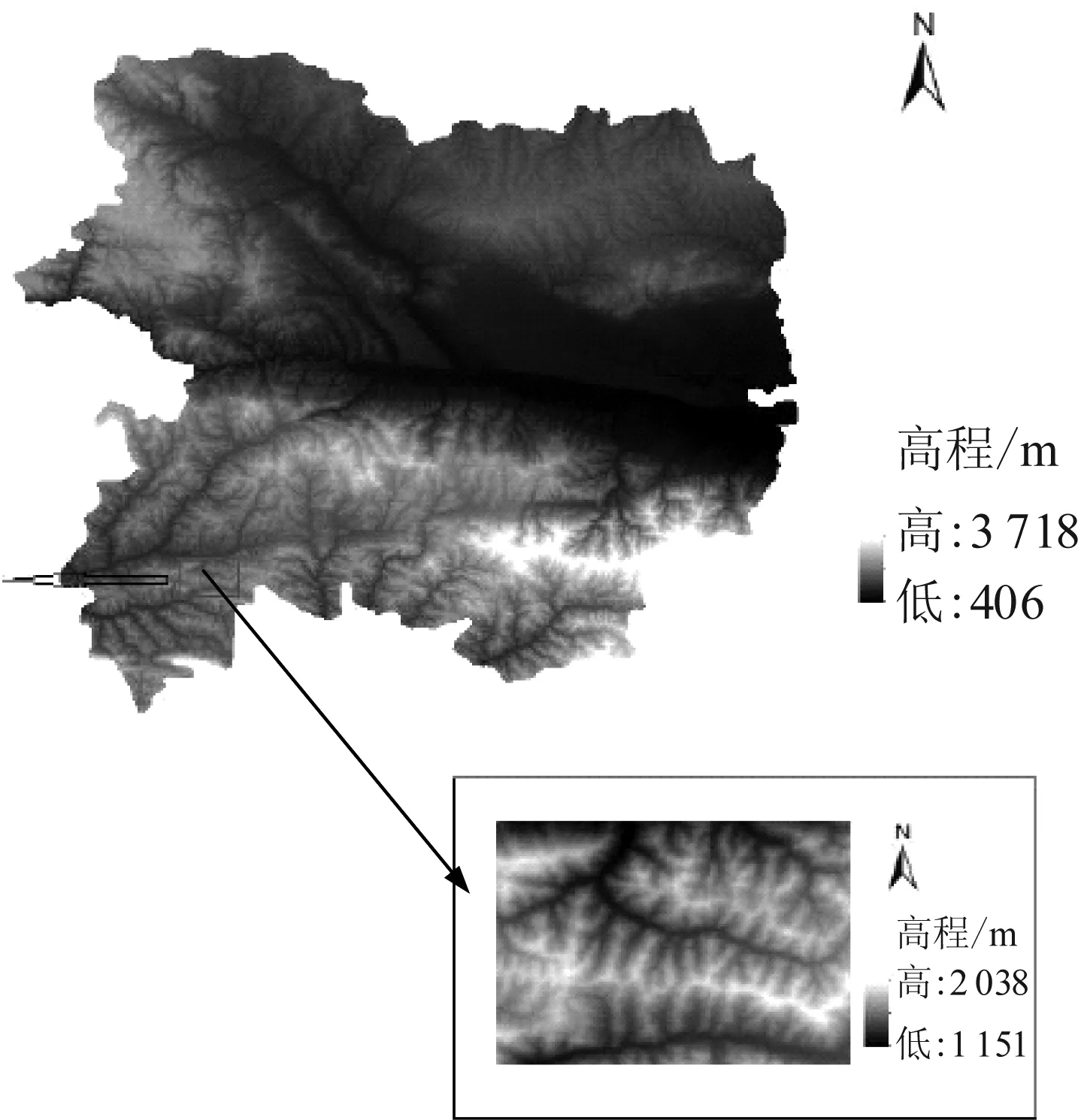
图2 研究区的高程数据
在研究区域中选取7个控制点,具体控制点分布如图3所示。
控制点坐标(X,Y,Z)的具体数据如表1所示。
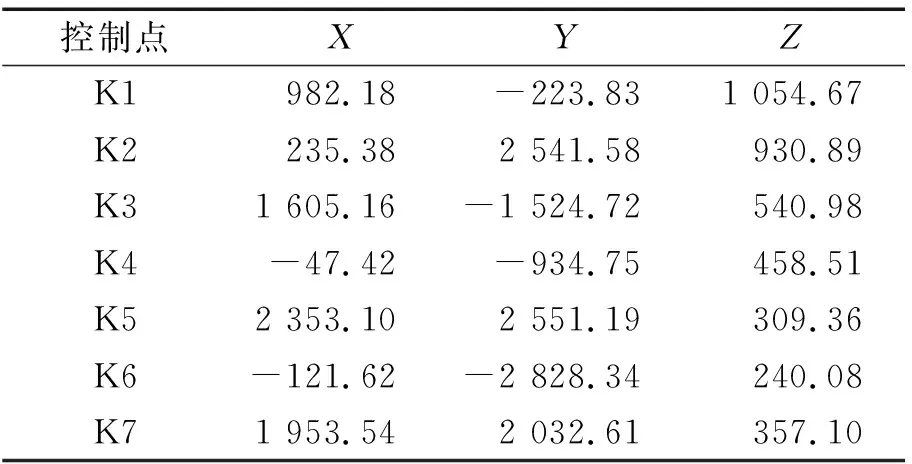
表1 控制点坐标的具体数据
基于布设的控制点坐标,将将高程数据转化为坡度数据,结果具体如图4所示。
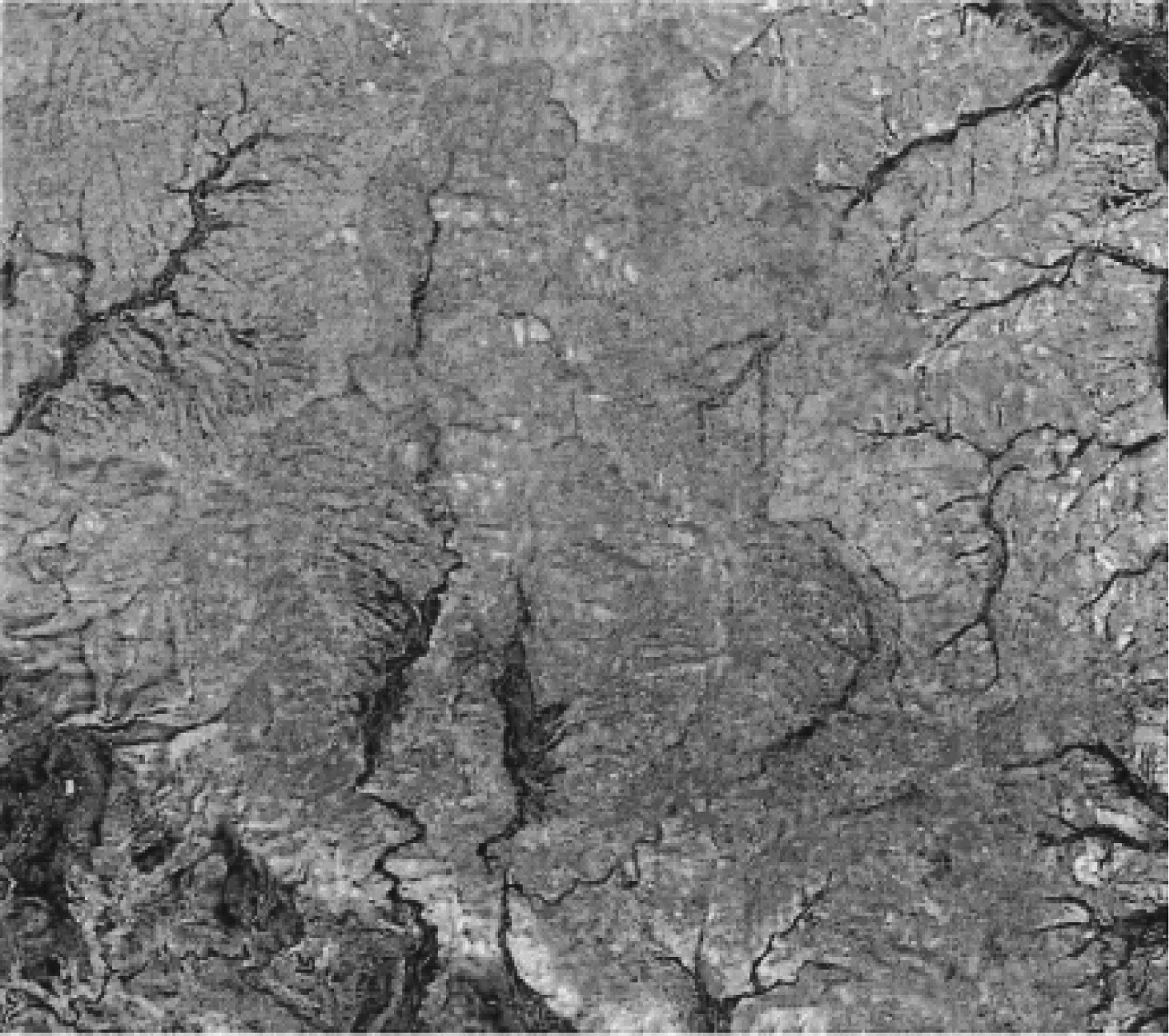
图4 坡度图
利用设计方法对实验地区进行地形构造线提取实验。获取坡度为35.47°~51.47°时的图层提取误差数据,并进行分析,以验证设计方法的实用性。
2.2 获取结果分析
在坡度为35.47°~43.47°时,基于无人机影像和高程数据的地形构造线确定方法与基于形态几何模拟技术、基于图像处理技术的地形构造线确定方法的图层提取误差实验如图5所示。
根据图5的图层提取误差实验数据可知,在坡度为35.47°~43.47°时,基于无人机影像和高程数据的地形构造线确定方法的图层提取误差低于基于形态几何模拟技术、基于图像处理技术的地形构造线确定方法的图层提取误差。
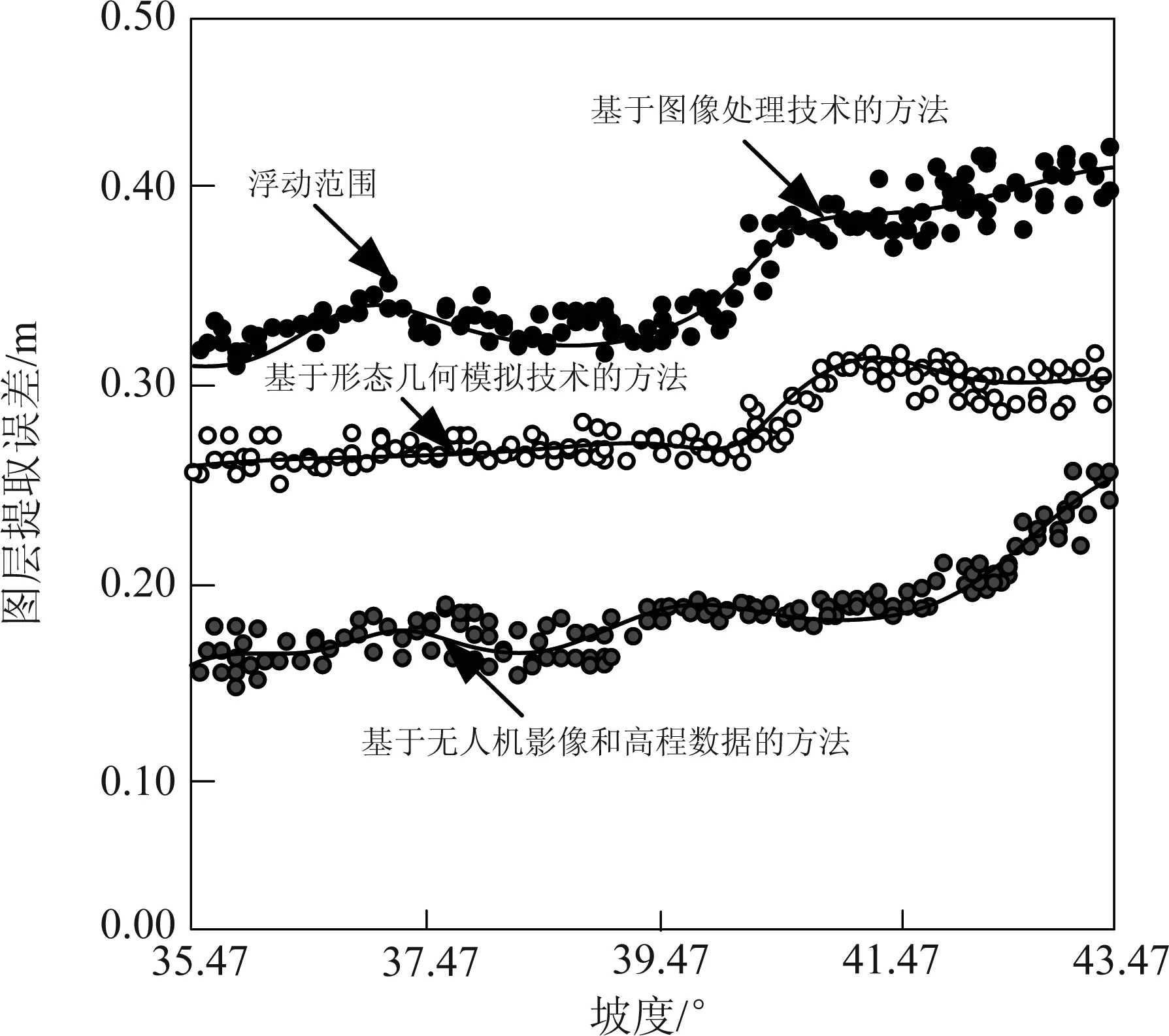
图5 坡度35.37°~43.47°的图层提取误差实验
在坡度为43.47°~51.47°时,三种实验方法的实验结果具体如图6所示。
通过图6的图层提取误差实验数据可知,在坡度为43.47°~51.47°时,三种实验方法中基于无人机影像和高程数据的地形构造线确定方法的图层提取误差最低。
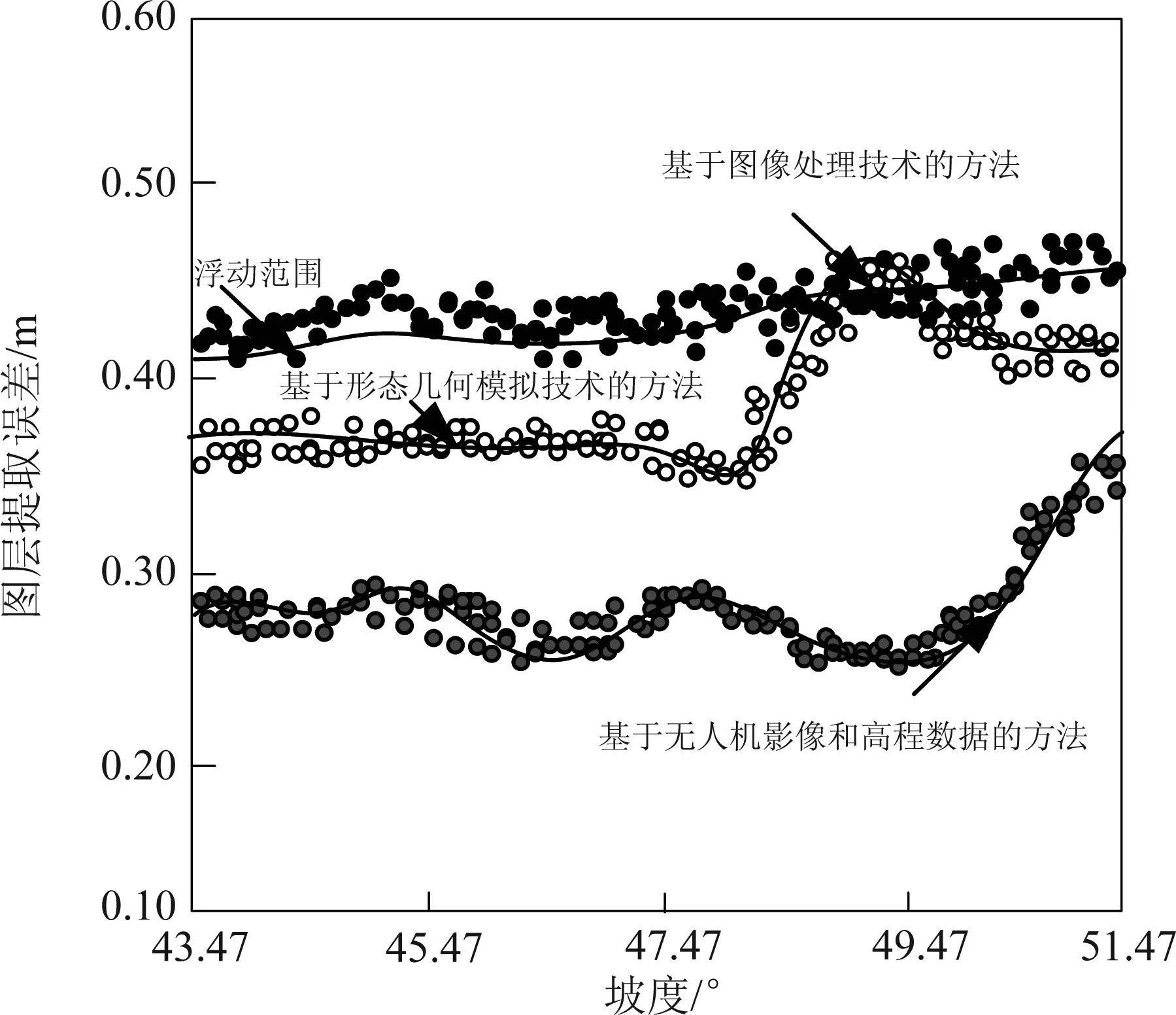
图6 坡度43.47°~51.47°的图层提取误差实验
由于设计方法结合了无人机影像和高程数据对地形进行分析,通过对地形高程数据进行预处理,并将高程数据转化为坡度数据,避免了传统方法中因栅格单元未对准坡降导致的图层提取误差大的现象,实现了高精度的地形构造线提取。
3 结束语
本文提出将无人机影像和高程数据应用在地形构造线的确定中,通过无人机遥感系统获取高程数据,并对高程数据进行图像灰度化、平滑处理、山轮廓提取,进一步将地形高程数据转化为坡度数据,提高了坡度数据的精度,实现了地形构造线的高精度提取。对于地形构造线提取精度的提升有很大帮助,为实际地形构造分析提供了一定的理论依据。