锂电SOC改进无迹卡尔曼滤波估算算法研究
2021-10-20孙桓五张凤博
杨 淇,孙桓五,2,张凤博
(1.太原理工大学机械与运载工程学院,山西 太原030024;2.煤炭资源开采利用与装备工程国家级实验教学示范中心,山西 太原030024)
1 引言
锂离子动力电池以其比能量高、比功率高、自放电率低、无记忆效应以及环境友好等突出优点被广泛应用于电动汽车领域[1]。准确的荷电状态估算对续航里程估算、延长电池的使用寿命、降低成本、提高其可靠性具有重要意义。研究精度高、时效性好、自适应修正能力强的SOC估计方法对提高BMS的性能具有重要价值。
目前国内外广泛应用于BMS的锂离子动力电池SOC估计方法主要有三大类:安时计量法、基于电池表征参数测量的方法、基于电池模型和观测器理论的方法等[2]。其中安时计量法对SOC初始值有很高的要求,并且会忽略估算累积误差的影响[3];基于电池表征参数测量的方法如开路电压法等的最主要问题在于其必须在电池稳定状态下才能估计,不适合应用于运行中的车辆[4,5];基于电池模型与观测器理论的方法中最常用的有扩展卡尔曼滤波(EKF)、滑模观测法、无迹卡尔曼滤波(UKF):EKF的线性化过程容易使估算过程中产生因为方差矩阵的非正定性导致估计值不收敛的问题[6,7];滑模观测法可以减小非线性模型对状态估算的造成的影响,但是频繁切换控制状态容易导致系统发生抖振[8];UKF改用统计线性化的方法,利用无迹变换求取均值和协方差,可以有效提高对非线性分布统计量的估算精度,但是这很大程度上取决于电池模型的精度以及系统噪声的预定变量,如平均值、相关性和协方差矩阵等。通常,系统噪声的预定变量设置不当,会导致系统误差和发散[9,10]。
为此,这里提出建立改进的等效电路模型,通过将欧姆内阻R纳入状态变量实现对其实时更新跟踪,以此提高锂离子动力电池模型的准确性,此外,采用滑模观测器实时估计未知噪声协方差,降低不确定噪声的干扰。最后通过实验验证了算法的估算精度和稳定性。
2 电池状态空间模型
目前锂离子动力电池模型有很多,常见的电池电路模型有经典的Rint、RC、Thevenin和PNGV模型等。Thevenin电池模型以其良好的非线性性,准确模拟电池的充放电过程和动态特性。但Thevenin模型在描述锂离子动力电池的极化特性方面表现不足,为此,在Thevenin模型的基础上增加一个一阶RC环路,来模拟浓差极化[3],建立改进的Thevenin模型,如图1所示。

图1 二阶RC电池模型Fig.1 Second-order RC battery model
图中:Uocv(soc,t)-电压源,表征荷电状态SOC与开路电压的非线性关系;UO和I-动力电池实际工作电压和电流;RO-电池的欧姆内阻;RP1、CP1-锂离子动力电池的电化学极化电阻和电容,用来模拟动态特性中表现出的短时间常数;RP2、CP2-锂离子动力电池浓度极化电阻和电容,用于模拟电池动态特性中表现出的长时间常数。以电池的荷电状态SOC、两个电容上的电压UP1、UP2作为状态变量,记状态变量X=以电流I作为输入量;以电池端电压UO为输出量。
根据二阶RC等效电路模型,建立锂离子动力电池模型的离散化状态方程:

离散化输出方程为:

式中:t-采样时间:CN-电池容量;K-离散时间变量。τ1=RP1CP1,,系统噪声为,其协方差为Q;观测噪声为vt,其协方差为R。
3 电池模型参数离线辨识
本次实验对象为中航锂电的CA63CFⅠ锂离子动力电池,实验平台由高低温交变实验柜、可编程充放电仪、台式电脑和对应的记录监控软件等组成,利用可编程充放电仪设定不同的工况条件并对电池进行充放电,通过高低温交变实验柜调节电池的工作温度,最后根据监控软件实时采集和存储电池的工作数据。为了辨识该电池在不同温度下的参数,设计了电池分别在(-15)℃,0℃,15℃,25℃温度下以大电流1C恒流充(放)360s,小电流0.01 A恒流充(放)430 s的循环脉冲充放电实验。
电池的开路电压OCV与荷电状态SOC之间为非线性关系[11]。这里通过快速法[11]来确定电池OCV与SOC的关系曲线。快速法的原理是利用某一特定电流做充放电循环,在SOC每间隔10%处静置一段时间,然后利用充电曲线中每个静置处的极小值点进行曲线拟合;利用放电曲线中每个静置处的极大值点进行曲线拟合;最后,求这两条曲线的平均值,即为OCV-SOC关系曲线。图2为该锂电池最终拟合的OCV-SOC关系曲线:
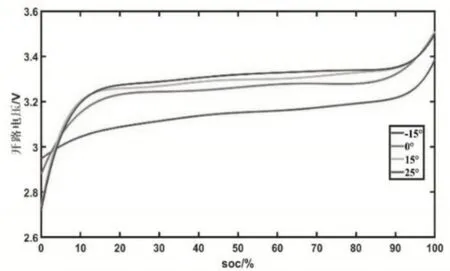
图2 锂电池的OCV-SOC关系曲线Fig.2 OCV-SOC relationship curve of lithium battery
为了辨识该电池在不同温度下的初始参数,利用指数拟合法[12,13],来拟合电池端电压对电流的相应曲线,具体方法如下:
由模型知放电时其端电压的输出方程:

指数拟合的函数表达式为:

比较两式得:
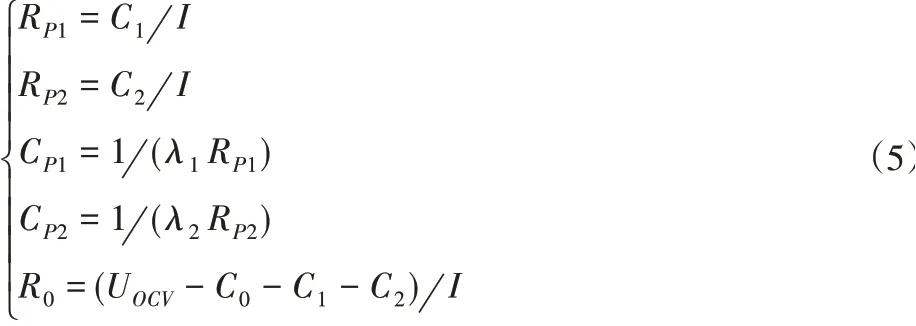
根据以上公式,得出电池的阻容参数,如表1所示。
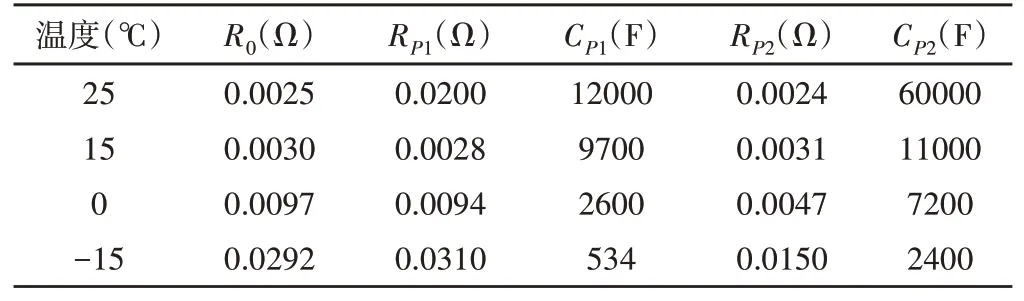
表1 电池模型参数值Tab.1 Battery model parameter values
4 改进的AUKF算法
4.1 扩充状态变量法实时追踪欧姆内阻
AUKF是基于模型的算法,对模型的精度要求很高。
为了提高模型的准确度,将欧姆内阻R0扩充为状态变量与SOC、UP1、UP2一同估计来实现R0的实时更新,状态方程修改为4维,具体如下:

离散化输出方程为:

方程(6)为状态方程,记为:

方程(7)为观测方程,记为:

式中:f-线性状态方程函数;h-非线性观测方程函数。设wk、vk分别具有协方差阵Q和R。AUKF算法采用对称采样策略做无迹变换,其均值、协方差与真实值匹配成4阶泰勒展开式,对比3阶状态方程精度明显提高,其具体运算过程如下:
(1)均值和协方差初始化:

(2)计算2n+1个sigma点,即采样点,并计算相应权值,n是状态的维数,n=4,λ为比例系数,式中表示矩阵方根的第K列:
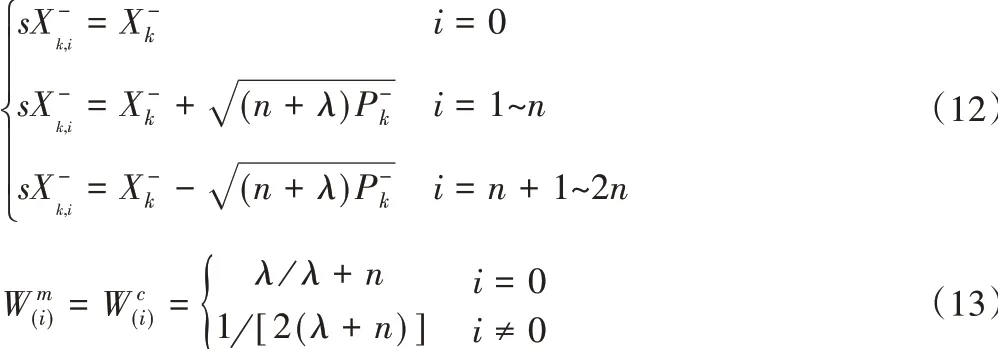
(3)计算2n+1个Sigma点集的进一步预测,i=1,2,…,2n+1:

(4)对上一步结果进行加权,求取均值和协方差:

(5)根据一步预测值,再次使用UT变换,产生新的Sigma点集:
(6)根据新的Sigma点集的观测预测值加权求和,求系统预测的均值和协方差:

(7)计算无迹Kalman增益矩阵:

(8)状态更新和协方差更新:

4.2 噪声的自适应匹配
滑模观测器是一种非线性状态观测器,相比其他状态观测器,滑模观测器具有较好的估计精度和稳定性。将卡尔曼滤波器与滑模观测器结合,可实现对带有噪声信号的滤波,为卡尔曼滤波器的估计状态提供更准确的估计值[14]。文献[14]提出了基于扩展卡尔曼滤波的改进滑模观测器来滤除过程噪声,文献[15]证明了滑模观测器的稳定性,这里在此基础上,根据实时SOC的预测值与估计值的误差,以及实时端电压u的预测值与估计值的误差来更新系统噪声和观测噪声,构造滑模观测器如下:
(1)提出新的遗忘因子:

(2)对系统噪声协方差矩阵Q进行估计:

(3)对观测噪声协方差矩阵R进行估计:

用最新的估计值QK+1,RK+1代替公式(16)(20)中的Q、R。
5 仿真结果与分析
为了充分验证该算法的精度、稳定性及适用性,在25℃、15℃、0℃、-15℃温度下的脉冲放电实验基础上,分别利用UKF和改进后的AUKF通过MATLAB进行仿真,仿真中的噪声设置为高斯白噪声,将SOC实时估计结果与实测电池SOC曲线进行对比。仿真结果如下图所示。
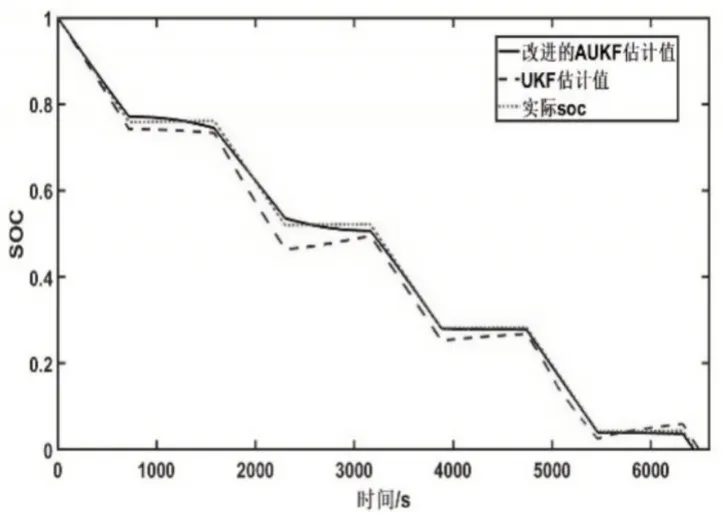
图4 15℃时改进的AUKF和UKF估计SOC曲线Fig.4 Improved AUKF and UKF Estimated SOC Curves at 15℃
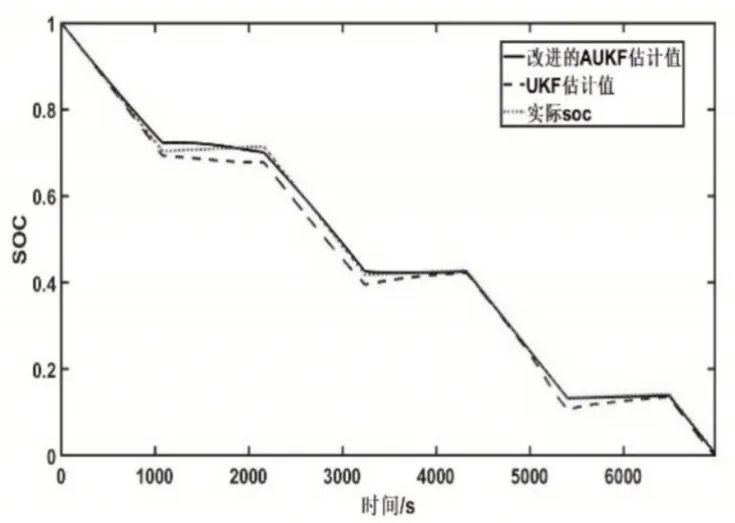
图5 0℃时改进的AUKF和UKF估计SOC曲线Fig.5 Improved AUKF and UKF Estimated SOC Curves at 0℃
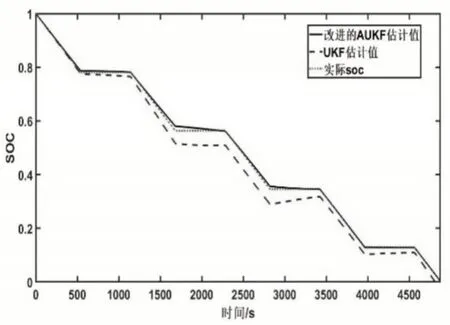
图6 (-15)℃时改进的AUKF和UKF估计SOC曲线Fig.6 Improved AUKF and UKF Estimated SOC Curves at(-15)℃
从图3~6可看出,在各个温度下的脉冲放电过程中,当2000s左右高斯白噪声达到顶峰时,使用传统的无迹卡尔曼滤波算法估计荷电状态SOC均会随着噪声的增大出现较大的误差,而改进后的AUKF算法则能实时稳定的跟踪SOC,经过四组实验及仿真验证SOC的估算误差控制在2%以内,精度和稳定性都有了很大的提高。

图3 25℃时改进的AUKF和UKF估计SOC曲线Fig.3 Improved AUKF and UKF Estimated SOC cCurves at 25℃
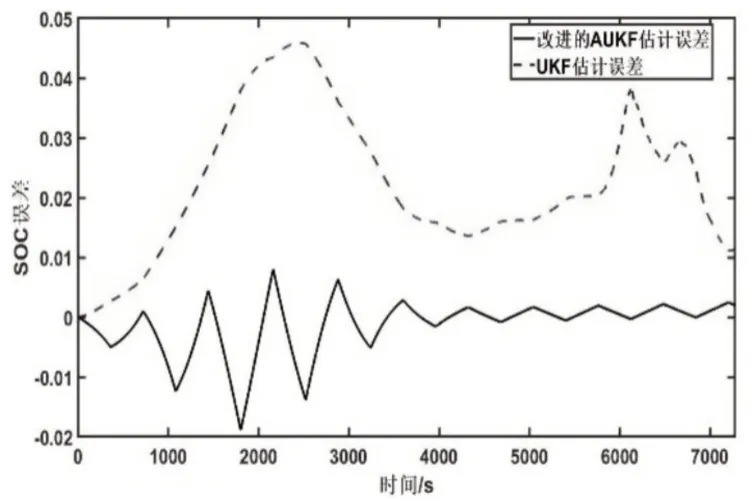
图7 25℃改进的AUKF和UKF算法估计误差曲线Fig.7 Estimated Error Curve of Improved AUCF and UKF Algorithm at 25℃

图8 15℃改进的AUKF和UKF算法估计误差曲线Fig.8 Estimated Error cCurve of the Improved AUKF and UKF Algorithms at 15℃
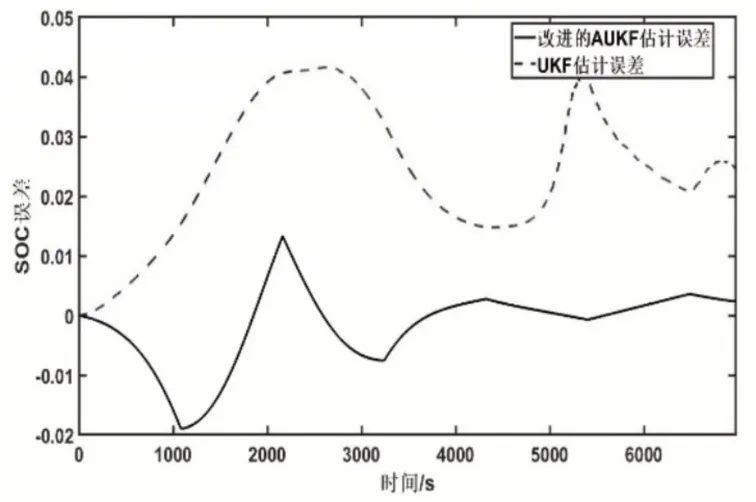
图9 0℃改进的AUKF和UKF算法估计误差曲线Fig.9 0℃Improved AUKF and UKF Algorithm Estimation Error Curve
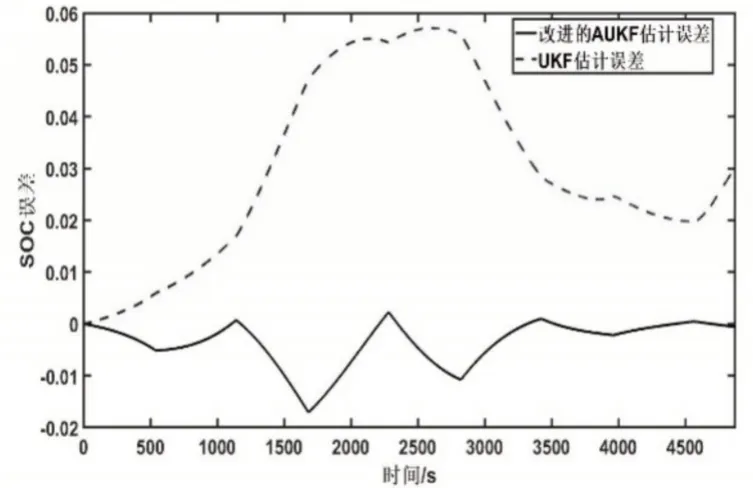
图10 (-15)℃改进的AUKF和UKF算法估计误差曲线Fig.10(-15)℃improved AUKF and UKF Algorithm Estimation Error Curve
6 结论
(1)针对模型参数时变影响算法精度的问题,这里根据二阶RC电池模型,扩充状态变量得到4维的状态方程,通过将欧姆内阻R纳入状态变量实现了对其实时更新跟踪,从而提高了电池模型的精度并对SOC进行了校正。
(2)针对电池复杂的负载情况,这里在传统无迹卡尔曼滤波算法的基础上引入新的遗忘因子,构造滑模观测器对未知噪声协方差进行实时估计,降低不确定噪声的干扰。实验结果表明改进后AUKF算法对不同温度条件,特别是低温环境下的荷电状态SOC具有较强的适用性和稳定性,对比传统的UKF算法精度和稳定性有了较大的提高,满足实际的应用要求。
