AEB系统的CarMaker/Simulink联合仿真研究
2021-10-20秦程现爱慕轮
秦程现,张 蕾,爱慕轮
(天津职业技术师范大学 智能车路协同与安全技术国家地方联合工程研究中心,天津300222)
1 引言
自动紧急制动(Autonomous Emergency Braking,AEB)系统是通过环境感知系统对车辆及周围驾驶环境进行实时监控,并根据内部算法预判车辆安全系数[1]。当安全系数超过不同的危险阈值时,车辆会分别采用不同策略提醒驾驶员或采取辅助紧急制动,从而来避免碰撞事故的发生或减轻碰撞事故的严重程度[2]。欧洲新车安全评鉴协会(Euro NCAP)已将AEB纳入新车主动安全的评价规程,我国最新版的C-NCAP(2018版)也开始将AEB纳入新车评价规程[3]。
目前,国内外学者对AEB系统开展了广泛研究,Flores Carlos等人针对城市工况提出了一种基于分数阶控制的协同自适应控制系统,实现了对行人轨迹的预测[4];文献针对隧道工况提出了基于高度和倾斜角度的最佳部署条件以及RF信号的噪声滤波方案,以便保证车辆在隧道中的具有较好的检测性能[5];文献提出了一种融合制动控制和转向控制的自动紧急控制策略,可以对驾驶员不当驾驶行为进行纠正[6]。
由于不同交通环境及驾驶习惯,国外已有的研究成果并不能直接应用于我国复杂的道路场景。基于此,提出了一种基于碰撞时间的AEB算法。在CarMaker/Simulink中建立车辆动力学模型和上下层控制器,根据碰撞时间预判车辆安全范围,输出两级预警和制动干预,避免车辆出现纵向碰撞。
2 基于碰撞时间的AEB系统算法
设本车速度为v1,最大制动减速度为amax;前方目标物体速度为v0,制动减速度为a0;相对距离为ds,相对速度分别vr,相对减速度为ar;两车碰撞时间为ttc,制动时间阈值为ttb,制动延迟时间为τB。
依据参考文献[6]研究可知,前方目标静止工况时,可知:
碰撞时间:


制动主缸压力为:

式中:m-整车质量;v1-车辆速度;CD-空气阻力系数;A-迎风面积;ρ-空气密度;g-重力加速度;f-滚动阻力系数;Kb-制动力和制动主缸压力之间的比值。
3 AEB控制系统设计
根据有限状态机原理,在Matlab/Simulink中设计AEB系统的控制策略,包括上层和下层控制器。其中,上层控制器为有限状态机模型,决策AEB系统的期望制动减速度状态;下层控制器根据接收到的期望减速度信号,通过内部控制策略输出Gas或Brake信号。
3.1 上层控制器设计
依据控制算法搭建上层控制器模型。上层控制器主要接收环境感知信息和车辆自身状态信息,从而确定车辆期望减速度。所接受的信号主要有目标物体的相对距离(Target.ds)、期望的时间间距(Desired time gap)、目标物体的速度(Target.dv1)、本车速度(v)、本车减速度(ax speed)。其中,DistCtrl.kd和DistCtrl.kv为距离控制器的增益参数,默认值分别为kd=36.0,kv=2.0,在Simulink搭建的模型,如图1所示。

图1 AEB系统上层控制器原理图Fig.1 Schematic Diagram of the Upper Controller of the AEB System
3.2 下层控制器设计
下层控制器采用PI控制器,根据上层控制器输出的期望减速度ax和实际减速度a的差值,即;e(t)=ax(t)-a(t),将偏差的比例和积分通过线性组合构成控制量,输出Gas/Brake逻辑值。
在PI控制器中,用试凑法确定调节参数[7],实行先比例后积分的步骤。设定控制器的p_gain参数值为0.001,i_gain参数值为0.003,首先整定比例部分,观察系统的响应;其次,加入积分环节,减小积分时间,使静差得以消除。此外,为避免期望减速度过大,用饱和函数将减速度限定在预期范围内。在Simulink中的下层控制器模型,如图2所示。依据控制器输出的逻辑值范围进行车辆工况判断,若在输出逻辑值在[-1,0]范围内,则输出Brake信号。

图2 AEB系统下层控制器原理图Fig.2 Schematic Diagram of the Lower Layer Controller of the AEB System
3.3 控制策略
文献[8]研究表明:一般碰撞时间ttc=1.1-1.4s,车辆的制动减速度的平均值为0.52g,实际行驶车辆的绝对安全距离一般为(2~5)m。在算法中设定ttc为1.3s,绝对安全距离为2m。由于当ds=0时,ttc无解,所以在CarMaker中设定vr的下限为1μm/s。
在驾驶员无任何干预下,当系统计算实际ttc达到2.8s、2s和1s时,分别进行警告预警、一级制动预警和紧急制动预警。当一级制动预警结束时,保持0.5s的额外制动时间;当紧急制动工况时,保持全力制动,当车辆停止后(v<0.2 m/s)继续制动5s时间,以确保避免潜在危险。
根据文献研究成果[9],通过期望减速度和碰撞时间来估计危险,确定四种状态的控制策略范围,具体逻辑控制如表1所示。
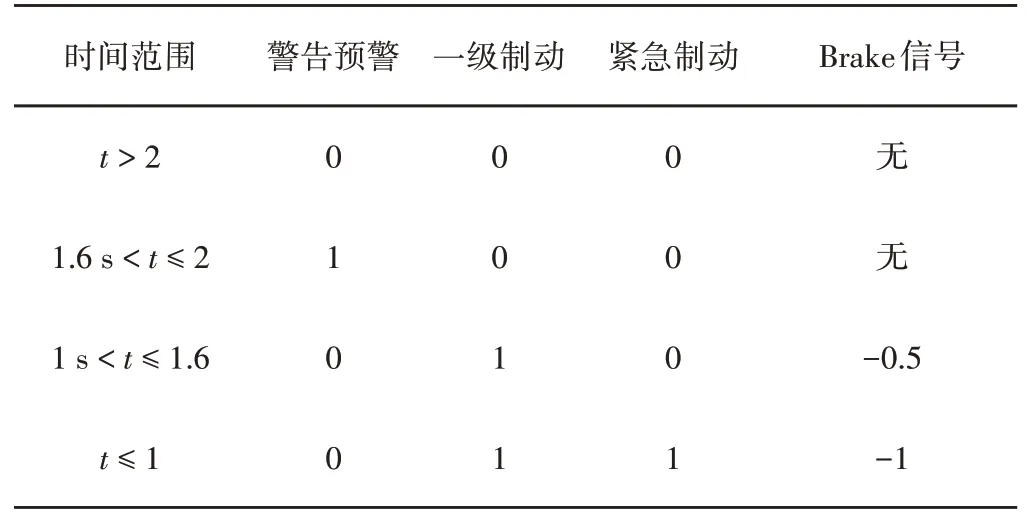
表1 控制算法逻辑表Tab.1 Control Algorithm Logic Table
(1)安全工况:当ttc>2s时,则判定车辆处于安全行驶工况,下层控制器内部逻辑切换到[0,1]之间,输出节气门Gas信号,无制动信号输出,车辆保持原车速度行驶。
(2)警告预警:当1.6s<ttc≤2s时,车辆内部报警装置蜂鸣,提示驾驶员处于危险工况。
(3)一级制动预警:当1s<ttc≤1.6s时,下层控制器内部逻辑输出数值为(-0.5),输出Brake信号,进入一级制动状态,实施50%制动。
(4)二级制动及预警策略:当ttc≤1s,判定车辆处于高度危险工况,下层控制器内部逻辑直接切换到最小值-1,进入二级紧急制动状态,实施100%全力制动。
4 CarMaker系统建模
4.1 CarMaker车辆动力学模型
利用CarMaker动力学仿真软件搭建车辆动力学模型,实时模拟车辆的运行过程[10]。车辆动力学模型与Simulink采用Plug方式兼容,可以将环境感知信息及时传输给Simulink上层控制器。CarMaker车辆动力学模型主要包括车身、悬架系统、转向系统、动力传动系统、制动系统、轮胎和传感器模型七个部分,主要性能参数,如表2所示。

表2 动力学模型主要参数表Tab.2 Main Parameters Table of Dynamic Model
4.2 目标传感器设计
配置目标传感器参数,传感器位置坐标(Position x/y/z[m])参数为2.45/0.0/1.25 m;传感器方位角度(Orientation x/y/z[deg])参数为0.0°/1.0°/0.0°;检测的水平角度和垂直角度(Field of view h/v[deg])参数为45°/45°,最大角度为180°;检测前方最大范围(Range max[m])为100 m;摄像头更新频率和偏差(Update[Hz]-Cycles offset)参数为1000 Hz/0。
4.3 道路场景建模
依据中国汽车技术研发中心发布的C-NCAP(2018版)中关于AEB系统的追尾评分项目[11],在CarMaker中搭建城市水平路面自动紧急刹车仿真测试场景,设计前方目标车辆静止、前方目标车辆缓慢移动和紧急工况三种,如图3所示。

图3 道路场景Fig.3 Road Scene
(1)静止工况试验场景设置:初始阶段,本车以70 km/h速度行驶;行驶一段距离后,传感器检测到前方100 m范围内有目标车辆处于静止状态。
(2)缓慢移动工况试验场景设置:初始阶段,本车以60 km/h速度行驶;行驶一段距离后,传感器检测到前方100 m范围内有目标车辆减速行驶。
(3)紧急制动工况试验场景设置:初始阶段,本车以40 km/h速度行驶;行驶一段距离后,前方路口突然出现车辆。
5 仿真验证与数据分析
采用CarMaker/Simulink联合仿真,验证在三种不同道路工况下控制策略的有效性,以此解决当前AEB系统控制策略尚不能很好地适应驾驶员行为和满足车辆避撞效能的需要。根据式(1)和(4)计算要求,通过采集相对距离ds和相对速度vr来计算两车碰撞时间ttc,从而验证设计的AEB系统能否根据碰撞时间预判车辆危险情况,并根据控制策略触发制动干预。此外,通过分析两车最小相对安全距离ds数值,判断车辆是否处于安全距离(2~5m)范围之内,进一步验证AEB系统的有效性。因此,仿真过程中,选取相对距离和相对速度作为仿真曲线进行数据分析。图中:线1-相对速度曲线;线2-相对距离曲线。
5.1 前方目标静止工况测试
如图4所示,在(0-17.851)s位置时,车辆正常行驶。17.861s位置时,vr为69.30 Km/h,ds为29.84 m,此时碰撞时间为1.610s,开启一级制动。17.951s位置时,相对车速vr为69.1km/h,相对距离ds为21.01m,此时碰撞时间为1.094s,进入二级紧急制动阶段。20.381s位置时,车辆停止,车ds为2.3m,在最小安全距离范围之内。

图4 静止工况曲线Fig.4 Static Working Condition Curve
5.2 前方目标缓慢移动工况测试
如图5所示,(0~12.681)s位置时,车辆正常行驶。12.791s位置时,相对车速vr为27.31 Km/h,相对距离ds为11.7m,碰撞时间为1.54s,开启一级制动。13.001s位置时,相对车速vr为9.14 Km/h,两车相对距离ds为2.39m,此时,AEB系统进入二级紧急制动阶段;在14.341s位置时,两车距离最小为2.53m,两车有效避免了碰撞事故的发生。在(14.345~22)s位置时,目标车辆继续行驶,两车相对距离ds逐渐加大。

图5 减速工况曲线Fig.5 Deceleration Curve
5.3 紧急制动工况测试
如图6所示,在(0~7.601)s位置时,传感器未检测到前方障碍物,此时车速为40km/h,相对车速为零,相对距离ds为无穷大,车辆正常行驶。在(7.611~13.701)s位置时,传感器检测到前方有目标车辆出现,此时期望减速度为(-0.019)m/s2,车速为39.6 Km/h,相对车速ds为58.788km/h,车辆正常行驶。在13.711s位置时,车辆以前方路口突然出现车辆,AEB系统进入二级紧急制动阶段,减速度范围在[-8.32,-3.75]m/s2。在14.801 s位置时,两车相距最小距离ds为2.31m,本车速度为8.28km/h,在15.101s位置时,本车速度变为零,目标车辆继续行驶,此时相对距离和相对速度逐渐变大。

图6 紧急制动工况曲线Fig.6 Emergency Braking Condition Curve
6 结论
研究开发了一种基于碰撞时间控制算法的AEB系统,并在CarMaker/Simulink中进行联合仿真验证。通过仿真试验得出如下结论:
(1)AEB系统可按照C-NCAP(2018版)评价规程和车辆自动紧急制动测试的要求,正确发出碰撞预警和制动信号,仿真验证过程中没有出现漏报和误警情况。
(2)试验过程中两车最小相对安全距离,符合文献[8]提出的安全距离范围要求。前方车辆静止工况时(v1=70 km/h),两车最小相对安全距离为2.3m;前方车辆缓慢移动工况(v1=60 km/h)时,两车最小相对安全距离为2.53m;在紧急工况(v1=40 km/h),两车相对最小距离为2.31m。可见,三种试验工况均能保证车辆与行人的安全。
(3)模糊控制中采用了饱和函数,将减速度输出范围限制在[-1,0]范围内,使制动过程相对平稳,较好地模拟了有经验驾驶员的紧急制动过程,与单一控制恒定减速度输出系统相比,具有更好地舒适性和安全性。
此外,本研究只对车辆纵向避撞算法进行了研究,没有考虑横向避撞算法和多目标、转弯工况以及交叉路口工况。下一步研究过程中,可以将自由空间传感器Free Space sensor应用于AEB系统开展研究,以提高车辆在横向、纵向以及复杂道路工况的安全性能。
