适用于弯道的侧后方驾驶辅助系统预警策略
2021-10-20杜亚坤高继东高博麟
杜亚坤,高继东,宋 攀,高博麟
(1.河北工业大学机械工程学院,天津300130;2.中国汽车技术研究中心有限公司 汽车工程研究院,天津300300)
1 引言
在交通事故中,由汽车侧后方盲区造成的意外事故约占25%[1],大多数驾驶员因没有察觉碰撞危险而并未采取避撞措施[2]。此外,驾驶员在驾驶过程中需要操纵油门踏板、制动踏板、转向灯和方向盘,没有足够的精力关注车辆侧后方的盲区内的车况[3]。研究一种针对汽车侧后方盲区的驾驶辅助系统,对降低类似交通事故发生率将发挥明显的作用,是未来汽车安全领域的重点研究内容。
目前,针对车辆侧后方的主动安全系统主要包括盲区检测系统(BSD)、换道辅助系统(LCAS)、后方横向交通预警系统(RCTA)。现有的侧后方辅助系统往往简单地考虑单一固定盲区[4],将此盲区设置为报警区域,或仅适用于直道工况[5,6]。然而,简单的考虑为单一固定盲区无法适应不同工况下危险程度不同的特点,并且不能贴合行车过程中驾驶员的操作行为。忽略弯道工况将大大减小系统的适应性,在弯道工况下易发生虚警、漏警的情况。因此,通过分析驾驶员的行为习惯实现了更加贴合驾驶员行为习惯的侧后方分级预警策略。并针对弯道工况,开发了弯道车距识别算法,使分级预警策略适用于弯道工况。
2 分级预警策略
为了区分不同危险程度的行车工况,采用分级预警策略。将驾驶员所处的交通环境按照危险程度分为Ⅰ和Ⅱ两个等级。等级Ⅰ表示危险程度较低,采用基于灯光的提示性预警提醒驾驶员危险的存在。等级Ⅱ表示危险程度较大,此时系统采用灯光和声音双重警告提醒驾驶员碰撞将要发生。为了保证自车的安全性,使用纵向最小安全距离DMSS保证自车与目标车不发生碰撞事故。将实际行车工况简化为两种驾驶场景:(1)自车无换道操作;(2)自车换道进入目标车所在车道。
自车驾驶员无换道行为时,自车与相邻车道目标车无碰撞趋势。此时,令后方的预警区域为一固定区域,DMSS,Ⅰ=3m。若自车与目标车沿车道距离s>DMSS,Ⅰ,自车与目标车之间无碰撞风险。若s<=DMSS,Ⅰ,自车与目标车之间存在较低碰撞风险,处于等级Ⅰ。
自车驾驶员有换道行为时,自车与相邻车道目标车存在碰撞趋势,且危险程度与自车及目标车运动状态有关。目前,华南理工大学研究的安全距离模型[7]是一种典型的模型。该模型考虑了车辆形状因素L、W和驾驶员特性,建立车辆形状椭圆几何模型,并考虑换道时速度和车道夹角θ与车辆间相对运动关系建立了安全距离模型。最小安全距离DMSS为:

式中:Vsub-自车车速;Vobj-目标车车速;L-车长;W-车宽;ta-换道加速时间;θ-换道时速度与车道夹角;Td-驾驶员系数。若,s≤DMSS,Ⅱ自车与目标车之间存在较高碰撞风险,处于等级Ⅱ。
3 弯道车距识别算法
在弯道工况下,自车与目标车的运动状态主要可分为三种情况:自车驶入弯道目标车未驶入弯道、自车与目标车均驶入弯道、自车驶出弯道目标车未驶出弯道。弯道车距识别对弯道工况下侧后方盲区预警及其他主动安全功能具有重要作用[8]。
3.1 车辆轨迹点计算
以自车后保险杠中点为原点,沿自车行驶方向为X轴正方向,垂直X轴向左为Y轴正方向建立车辆坐标系,如图1所示。

图1 车辆坐标系Fig.1 Coordinate System of Vehicle
自车行驶过程中,汽车做变速曲线运动,轨迹为具有道路形状趋势的不规则曲线。在较小的时间步长内,自车的运动状态可看作为匀加速直线行驶,每一段小轨迹可近似为一条线段,有:

将ΔOnOn-1Y近似为等腰三角形,可近似计算δn:

由图2可得,车辆第n+1时刻的轨迹点在坐标系OnXnYn的坐标为:

式中:x(n+z,n)-车辆n+1时刻的轨迹点在坐标系OnXnYn下的横坐标;y(n+z,n)-车辆n+1时刻的轨迹点在坐标系OnXnYn下纵坐标。通过式(2)、(3)、(4)可计算车辆任意时刻在前一时刻下的轨迹点坐标。通过递推可计算车辆第n+1时刻的轨迹点在初始坐标系O1X1Y1的坐标,有:

3.2 车辆轨迹计算
以轨迹点坐标拟合得到的4次多项式I(x)近似代替车辆轨迹函数[9],有:

3.3 沿车道方向相对距离确定
目标车位置信息可通过自车车尾两侧的毫米波雷达获得,相对距离为R、目标车与波束中心线夹角为θ。与自车相距R的所有点组成一个圆,第n+1时刻该圆在初始坐标系下方程为:

式(7)、(8)联立得到点的坐标(xi,yi)可近似视为自车相邻车道的目标车在初始坐标系下的坐标值。若不存在(x(j,1)≤xi≤x(j+1,1),1≤j≤n),则相对距离取为雷达探测距离;若存在,则沿车道方向自车与目标车纵向距离s为:

3.4 车辆横向距离确定
弯道工况下车辆相对位置关系,如图2所示。自车与目标车行驶方向的夹角为以O为圆心R为半径圆的弦切角,夹角为0.5β。
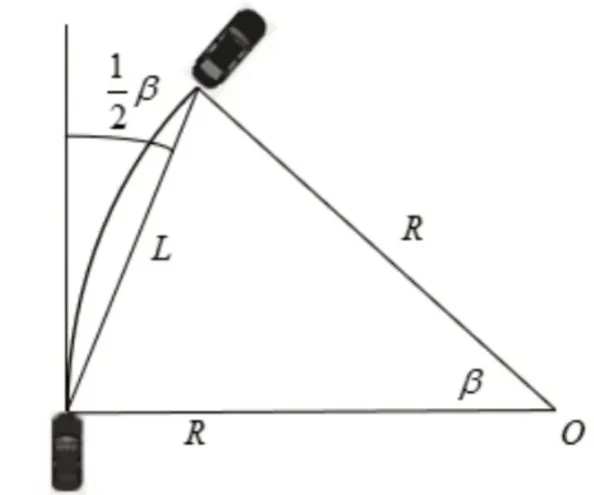
图2 弯道工况下车辆相对位置关系Fig.2 Relative Position Relationship of Vehicles Under Curved Road
弯道半径可由自车车载传感器测量得到的纵向车速VX,sub与横摆角速度ωsub计算得到。自车与目标车行驶方向的夹角为0.5β:

考虑到自车进入弯道后,侧后方目标车未进入弯道。因此自车与目标车行驶方向的夹角为(0~0.5)β渐变的过程。假设夹角线性增加或减小,变化时间t可以表示为:

式中:LR-自车进入弯道初始时刻与目标车的距离。
以左后方目标为例,目标在自车雷达坐标系下相对位置,如图3所示。
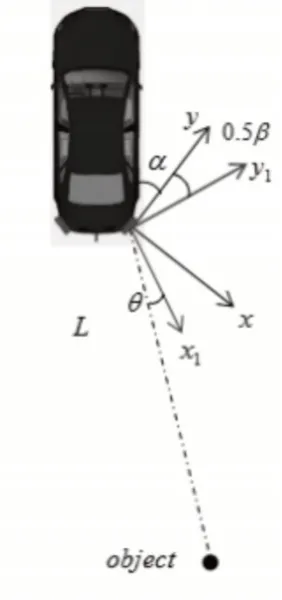
图3 目标在雷达坐标系下相对位置Fig.3 Relative Position of the Object in the Coordinate System of Radar
图中:坐标系xoy-处于弯道工况时的坐标系;坐标系x1oy1-xoy逆时针旋转0.5β得到;θ角在x轴右侧为负。处于弯道工况时目标车与自车沿垂直路径方向的距离h为:

若0.5m<h<3m,目标车未超过盲区的横向范围[10]。
4 仿真结果
4.1 沿车道方向相对距离仿真结果分析
针对弯道车距识别算法,仿真结果如下[11]:
(1)工况:自车以60km/h驶入100m直线行驶后进入R=125m的弯道,随后驶出弯道。
(2)工况:自车以60km/h驶入100m直线行驶后进入R=60m的弯道,随后驶出弯道。
由图4可知,当进入半径为125m弯道时,雷达直接探测距离与实际距离最大误差为2.3m,最大误差率为5.7%。算法计算距离与实际距离最大误差为0.50m,最大误差率为1.2%。

图4 半径125m弯道沿车道方向车辆相对距离对比Fig.4 Comparison of Relative Distance of Vehicles With Radius of 125m Along Lane Direction
由图5可知,当进入半径为60m弯道时,雷达直接探测距离与实际距离最大误差为3.5m,最大误差率为11.6%。算法计算距离与实际距离最大误差为0.45m,最大误差率为1.5%。

图5 半径60m弯道沿车道方向车辆相对距离对比Fig.5 Comparison of Relative Distance of Vehicles With Radius of 60m Along Lane Direction
对比两种工况结果可知,直道工况下三者计算结果几乎相同,但车辆进入弯道,雷达直接探测距离与实际距离有较大偏差。并且,弯道半径与探测结果的误差直接相关,弯道半径越小,雷达直接探测距离与实际距离的差距越为明显。在两种工况下,弯道车距识别算法计算距离均更为接近实际距离。
4.2 车辆横向距离仿真结果分析
(1)工况:自车以60km/h驶入100m直线行驶后进入R=125m弯道。目标车位于自车同车道跟车行驶。
(2)工况:自车以60km/h驶入100m直线行驶后进入R=125m弯道。目标车位于自车相邻车道侧后方行驶。
由图6所示,自车与目标车在同一车道,直道工况下雷达直接探测距离和算法计算距离结果一致。当自车进入弯道时,由于弯道曲率的影响,雷达直接计算结果偏离实际值,导致虚警现象发生。算法计算距离与实际距离最大误差为0.56m,横向距离h<0.5m,避免虚警现象发生。

图6 车辆间横向距离Fig.6 Horizontal Distance Between Vehicles
由图7所示,自车与目标车在相邻车道,直道工况下雷达直接探测距离和算法计算距离结果一致。当自车进入弯道时,由于弯道曲率的影响,雷达直接计算结果偏离实际值,导致漏警现象发生。算法计算距离与实际距离最大误差为0.45m,横向距离满足0.5m<h<3m避免漏警现象发生。
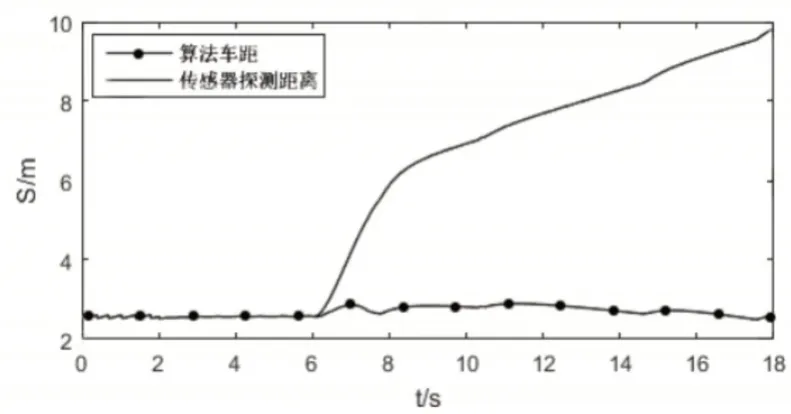
图7 车辆间横向距离Fig.7 Horizontal Distance Between Vehicles
4.3 分级预警策略仿真结果分析
(1)工况:自车以60km/h驶入100m直线行驶后进入R=125m的弯道,驾驶员无换道意图。目标车位于同车道跟随自车行驶。
(2)工况:自车以60km/h驶入100m直线行驶后进入R=125m的弯道,驾驶员无换道意图。目标车位于相邻车道在弯道以80km/h超越自车。
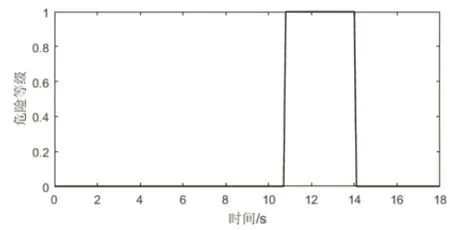
图9 危险等级Fig.9 Levels of Danger
(c)工况:自车以60km/h驶入100m直线行驶后进入
R=125m的弯道,驾驶员类型为保守型Td=0.1且有换道意图。目标车位于相邻车道在弯道以80km/h超越自车。

图10 危险等级Fig.10 Levels of Danger
由图8、9、10可知,基于弯道车距识别算法的分级预警策略可在弯道工况正确筛选危险目标物并适时预警。
图8 危险等级Fig.8 Levels of Danger
5 结论
(1)通过所建立的弯道车距识别算法计算自车轨迹点,并结合雷达获得的目标车位置参数计算出沿车道方向自车与目标车的相对距离,半径125m弯道工况误差率不超过1.2%,半径60m弯道工况差率不超过1.5%,降低了弯道工况下雷达直接探测所导致的误差,具有良好的精度。半径125m弯道工况计算得到的同车道车辆间横向距离最大误差为0.56m,相邻车道横向距离最大误差为0.45m。实现弯道工况下自车道与旁车道有效目标筛选。
(2)基于现有安全距离模型建立了分级预警的侧后方驾驶辅助系统预警策略,根据驾驶员是否有换道需求对危险等级进行分类,更加贴合驾驶员的实际驾驶操作习惯。
(3)基于弯道车距识别算法,使得侧后方驾驶辅助系统适用于弯道工况,提高了策略的适用性。
