辅助手术医用机器人的基本性能
2021-10-20张洋孟志平刘洋
张洋,孟志平,刘洋
北京市医疗器械检验所电磁兼容室 (北京 101111)
2000年,直觉外科公司(Intuitive Surgical,Inc.)获得美国食品药品监督管理局(Food and Drug Administration,FDA)批准,由其生产的Da Vinci 成了第一个腹腔镜综合手术机器人系统,自此以后,医用机器人系统正式开始作为安全有效的先进医疗器械登上为人民群众健康服务的舞台。
国务院印发的《中国制造2025》规划提出了在新形势下大力发展制造业的十年行动纲领,其中机器人及高性能医疗器械均在十大重点领域之列。《“十三五”规划纲要》中明确指出,重点发展医用机器人等高性能诊疗设备,积极鼓励国内医疗器械创新,全面提高医疗器械产业化水平。截至目前,我国医用机器人研发制造水平有了显著提高。2010年,北京天智航技术有限公司的天玑骨科手术机器人获得原国家食品药品监督管理总局批准,成了我国第一个取得医疗器械产品注册证的手术机器人。作为我国首台骨科手术机器人产品,天玑适用于脊柱、骨盆髋臼及四肢等13个不同部位,辅助手术精度达到0.82 mm,内固定优良率达到97.1%;同时,天玑易操作,使手术时间缩短了27.1%[1]。2018年,北京柏慧维康科技有限公司的“Remebot”成了国内首家正式获批的神经外科手术机器人。2020年,由天津大学主持研发的“妙手”微创外科手术机器人已进入临床评估阶段,即将填补国内主从控制医疗手术机器人这一领域的空白。
医用机器人作为三类医疗器械产品,对其进行注册管理,在产品全生命周期中必须考虑其对患者、医师及预期使用医疗环境造成的潜在危害,严格管控器械安全性和有效性。本文介绍了医用机器人的分类及其中辅助手术医用机器人的基本性能。
1 医用机器人的分类
医用机器人是指用于医院、诊所的医疗或辅助医疗机器人,可独自编制操作计划,依据实际情况确定动作程序,然后将动作变为操作机构的动作;其可识别周围情况及自身即机器人的意识和自我意识,从事医疗或辅助医疗等工作[2]。作为医疗器械产品,按预期用途可将其分为辅助手术医用机器人、康复机器人和诊疗机器人三类。
1.1 辅助手术医用机器人
国际电工委员会组织发布的标准IEC 80601-2-77:2019《Medical electrical equipment-Part 2-77:Particular requirements for the BASIC SAFETY and essential performance of ROBOTICALLY ASSISTED SURGICAL EQUIPMENT》[3]给出了辅助手术医用机器人的相关定义,即其是一种医用电气设备,包含由PEMS驱动的装置,预期用于机器人手术器械的安置或操控。按辅助手术医用机器人的工作模式,可将其进一步细分为导航定位手术机器人和内镜手术机器人。
1.1.1 导航定位手术机器人
导航定位手术机器人一般包含以下结构:(1)实时跟踪装置,如光学跟踪设备、磁导航跟踪设备和光学面扫描建模设备等;(2)机械臂定位装置;(3)末端器械装置。术前,通过CT、MRI 等成像设备采集患者病灶部位图像,医师据此分离病灶部位边界,规划手术路径,避开重要血管、神经等组织,给出靶点区域及器械入针点,并根据软件算法,完成患者注册,对患者坐标系、图像坐标系、机械臂坐标系进行配准;术中,机械臂按照医师规划路径以规划入针姿态到达规划入针点,医师可根据跟踪装置实时获取器械进入人体的状态信息。
目前,部分产品已实现“主动约束”功能,能够根据机器人末端执行器的所处区域(允许运动区域或禁止运动区域),来调控机器人末端的运动状态[4]。在神经外科手术过程中,可实现对手术区域的主动约束,避免末端器械超出约束区域损伤关键血管、神经组织;在骨科手术过程中,对机械臂末端切削设备的主动约束,可实现沿若干事先规划好的平面修配胫骨和股骨,其中,平面位置与方向的选择取决于患者的解剖结构。
在临床上,导航定位手术机器人主要完成骨科关节置换、脊柱矫形和修复、脑部活检、定点刺激、电极测量、去除囊肿等相关手术。骨科手术导航机器人见图1。

图1 骨科手术导航机器人
1.1.2 内镜手术机器人
微创术式的出现显著减小了手术创伤、减轻了患者术后疼痛、缩短了住院恢复时间,但与此同时,内镜手术打破了传统外科手术于直视下操作的习惯,医师不能再靠直觉的手眼协调来完成手术,而且长杆状的手术器械也放大了医师手部的生理颤抖,极大地增加了手术难度。
内镜手术机器人的出现解决了以上难题,以直觉外科公司的Da Vinci 为代表。机器人采用主从操作结构,术中医师可在操作台端直接获取经内镜放大10~15倍的高清三维图像,据此进行病灶定位和器械操作;机械臂执行端得到操作指令后,滤除人手的自然颤抖,提高手术精准度,以医师选择的相应动作比例低延时地完成相应的操作。总之,多种多样末端器械的存在,使医师可以轻松完成狭小空间内对病灶的牵拉、切割、缝合等精细操作。
由于采用主从操作这一结构特征,内镜手术机器人可以完成远程手术操作,如2001年9月,纽约马雷斯科教授使用ZEUS机器人为来自法国斯特拉斯堡市的患者实施了胆囊切除术,其即具有划时代意义的“林白手术”[4]。随着5G技术的日益成熟,无线传输带宽增加和低延时使远程手术成为现实。
单孔径内镜手术机器人和多孔径内镜手术机器人(图2)成了临床上内镜手术机器人的两个分支,同时末端柔性手术器械设计和力反馈功能的实现成了两项重要的研究内容。
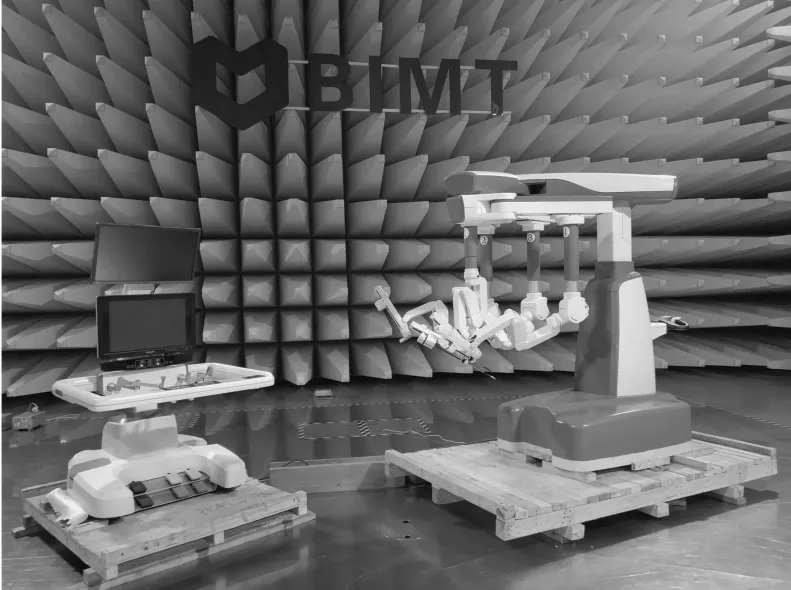
图2 多孔径内镜手术机器人
1.2 康复机器人
国际电工委员会组织发布的标准IEC 80601-2-78:2019《Medical electrical equipment-Part 2-78:Particular requirements for the BASIC SAFETY and essential performance of medical robots for rehabilitation, assessment, compensation or alleviation》[5]给出了康复机器人的4个功能方向:(1)康复,用于改善与患者损伤有关的运动功能的治疗;(2)评定,量化或协助量化患者损伤程度的程序;(3)代偿,通过身体结构的支承,或者通过身体功能的支承或替换来减轻患者损伤;(4)缓解,用于纾缓患者损伤所引起的症状。
康复机器人(图3)应用中非常重要的特点是机器人与患者在共存环境中的人机交互机制,其通过双向神经反馈来实现:(1)通过捕获患者的前向神经信号(脑电信号或肌电信号)实现对康复机器人的直接控制;(2)向患者施加相关感知信号(电刺激等),以实现患者的主观动作。根据脑神经可塑性理论,通过双向神经反馈,可取得更好的康复效果。
1.3 诊疗机器人
非手术诊疗机器人主要包括放疗机器人、影像机器人和胶囊窥镜机器人等辅助诊断治疗的机器人系统。
在放射治疗领域,随着图像引导放射治疗(imageguided radiation therapy,IGRT)技术的成熟,传统4个自由度的普通放射治疗床已经很难达到所需的精度要求,因此引入了6个自由度的放疗机器人,配合三维图像的引导来精确控制放疗计量的空间分布,显示出明显的精度优势。在最前沿的质子重离子粒子治疗设备中,均采用了6个自由度的放疗机器人完成放疗计划,其重复定位精度可达亚毫米级。质子治疗设备中的医用机器人见图4。
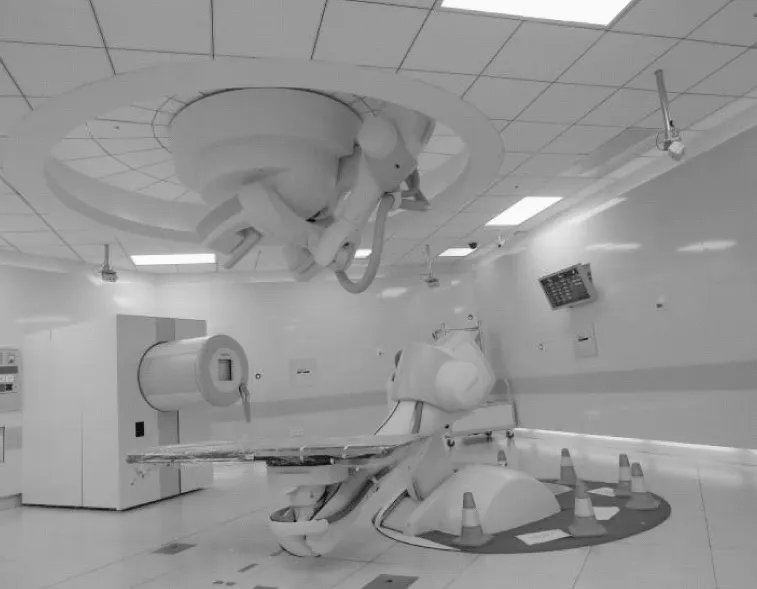
图4 质子治疗设备中的医用机器人
数字减影血管造影(digital substraction angiography,DSA)设备采用多轴重载机械臂连接C型臂X线球管装置和平板探测器成像系统,通过机械臂的灵活运动可实现360°全景成像和大范围3D重建,提升图像质量,临床可将其用于心血管、神经系统及全身血管造影和介入治疗手术中。血管造影X线成像系统见图5。

图5 血管造影X 线成像系统
2 辅助手术医用机器人的基本性能
我国的注册体系要求医疗器械产品取得产品上市许可注册证前需完成相应的型式检验,检验内容包括性能检测、电气安全检测、电磁兼容检测等。制造商首先应通过风险分析的相关办法明确产品基本性能相关内容,并解释该功能不可接受的风险。
最新发布的GB 9706.1-2020《医用电气设备 第1部分:基本安全和基本性能的通用要求》[6]给出了基本性能的定义,即与基本安全不相关的临床功能的性能,其丧失或降低到超过制造商规定的限值会导致不可接受的风险。定义医疗器械基本性能的出发点是制造商必须在设计产品时考虑由于临床功能相关的性能出现问题(故障)时引起的安全风险给患者带来的不可逆危害,而以往医疗器械仅强调由于设计、结构、安全指标本身不符合通用安全要求而引起的安全风险。
对于辅助手术医用机器人产品,国际电工委员会组织发布的标准IEC 80601-2-77:2019《Medical electrical equipment-Part 2-77:Particular requirements for the BASIC SAFETY and essential performance of ROBOTICALLY ASSISTED SURGICAL EQUIPMENT》[3]给出了两条基本性能补充信息(图6):(1)当执行外科手术所必需的信息退化时,能够确保无不可接受的风险;(2)当机器人手术器械的运动控制性能降低时,能够确保无不可接受的风险。其中,手术过程中所必需的信息指用于做出临床决策或影响临床行为或结果的任何数据,包括但不限于:(1)视觉信息,如视频或其他基于图像的数据;(2)计算信息,如辅助手术医用机器人施加的虚拟边界、手术器械的跟踪定位信息;(3)触觉信息,如辅助手术医用机器人提供的触觉反馈。信息退化的示例包括但不限于:(1)内镜图像不是实时图像或其延迟不可接受;(2)位置追踪信息由于追踪标记在追踪摄像机中被遮挡而中断;(3)位置追踪信息因患者追踪标记的移动而受损;(4)由于CT图像噪声过大或MRI图像扭曲,使3D骨骼模型无法精确地表达患者的解剖结构,导致配准精确度下降。机器人手术器械的运动控制包括以下几项:(1)限制机器人手术器械的运动范围,如虚拟边界;(2)改变操作者的输入与辅助手术医用机器人输出的机器人手术器械运动之间的速度和距离比,如震颤衰减;(3)包括一些机器人手术器械的自动功能,如自动器械对齐或切割工具的扭矩衰减;(4)对准并保持机器人手术器械相对于患者解剖结构的位置,并补偿患者的运动,如内镜把持;(5)在无操作者输入的情况下直接引起机器人手术器械的运动。机器人手术器械的运动控制性能下降示例包括但不限于:(1)机器人手术器械的定位和速度相对于操作者输入的延迟;(2)机器人手术器械的位姿与计算的路径、表面或静态位置的偏差。机器人手术器械的运动控制对于辅助手术医用机器人执行其预期功能至关重要,因此宜为每个辅助手术医用机器人制定有关运动控制的基本性能;特定的基本性能要求将取决于辅助手术医用机器人的预期用途。
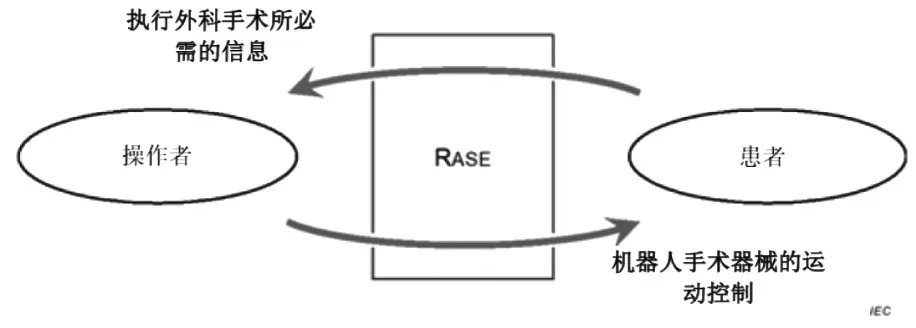
图6 辅助手术医用机器人的典型基本性能项目
在实际的型式检验中,因医疗器械产品临床功能的实现方式不同,风险分析不同,基本性能也不相同。
2.1 导航定位手术机器人的基本性能
对于导航定位手术机器人的基本性能,应从精度的准确性、手术过程重要信息的显示、机械臂的运动控制、末端执行工具功能的实现等方面考虑。
定位精度可详细分解为机械臂的位置准确度、位置重复性、跟踪定位装置的准确度、导航引导功能实现下的系统精度。机械臂的位置精度测试方法可参考GB/T 12642-2013《工业机器人 性能规范及其试验方法》[7]来进行,测试过程中需引进第三方三坐标精度测量设备(如激光跟踪仪或三坐标测量仪)来完成对机械臂末端位置和姿态信息的采集,通过计算得出准确度和重复性的具体量化指标。激光跟踪仪测量位姿的准确度和重复性见图7。
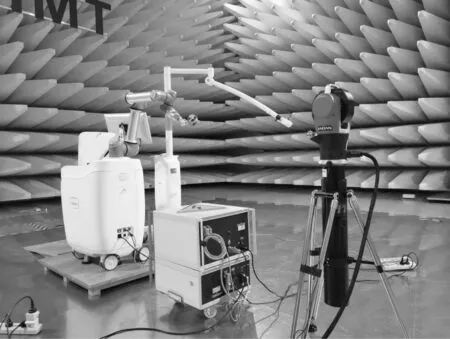
图7 激光跟踪仪测量位姿的准确度和重复性
系统精度的测量需制造商根据样机临床功能的实现,制备相应的测试工装。系统精度测试工装见图8。
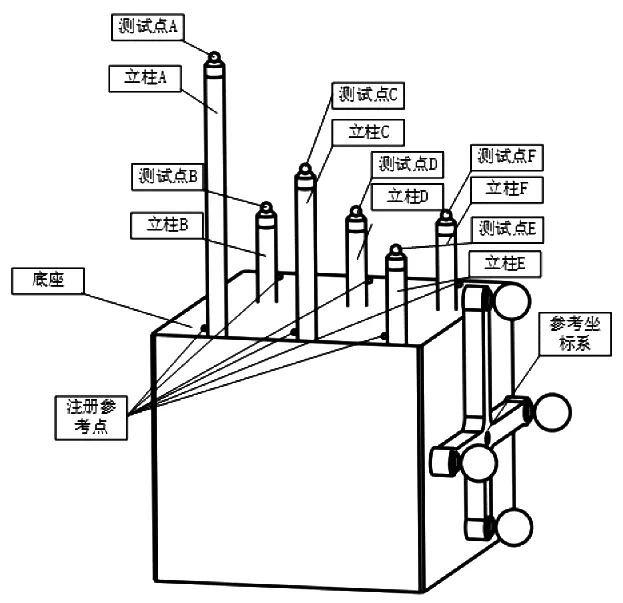
图8 系统精度的测试工装
手术过程重要信息的显示可分解为实时导航显示信息准确、无图像冻结、无数据丢失、无产生风险的延时等。
机械臂的运动控制可分解为机械臂运动受控、无非预期的移动、紧急状态下可快速离开患者表面等。对于一些在机械臂末端增加有源工具(如骨科手术中的切削刀具)的导航定位手术机器人,其新加工具临床功能带来的风险也应由制造商进行风险分析,在基本性能的确认中加以考虑。
2.2 内镜手术机器人的基本性能
对于内镜手术机器人的基本性能,应从主从操作距离准确度和距离重复性、主从操作姿态准确度和姿态重复性、主从延时时间、手术过程重要信息的显示等方面考虑。
在主从操作距离准确度和重复性的测试过程中,引导主端完成一定距离移动并保持,通过测量仪器分别测得主端设备参考点在主端设备基准坐标系下的移动距离以及末端执行器参考点在从端设备基准坐标系下的移动距离,并进行精度计算。其中,主端设备基准坐标系是根据术者观察监视器的视线方向确定的,从端设备基准坐标系是根据视觉图像采集设备的观察平面确定的。主端设备和从端设备的基准坐标系见图9。
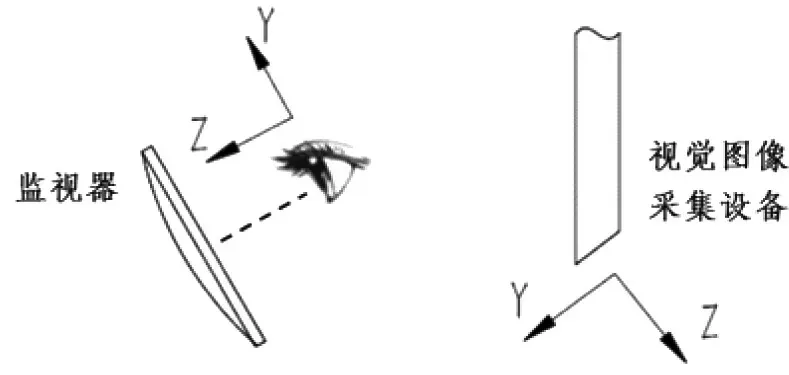
图9 主端设备和从端设备的基准坐标系示意图
在主从操作姿态准确度和重复性的测试中,引导主端运动到某一特定点并保持某一姿态,通过测量仪器分别测得主端设备参考点在主端设备基准坐标系下的姿态以及末端执行器参考点在从端设备基准坐标系下的姿态,并进行精度计算。
主从操作准确度测试见图10。
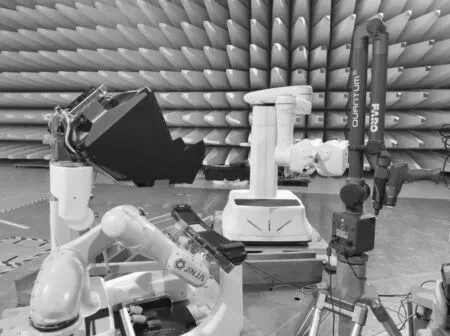
图10 主从操作准确度测试
在实际测试过程中,为了保证主端运动的稳定性和可重复性,采用辅助机械臂进行示教规划运动路径来牵引主端运动。同时,由于从端设备末端为柔性手术器械,受外力易发生形变,无法直接采用接触式三坐标测量仪或安装激光跟踪仪靶球进行测量,最终选取非接触式三坐标光学面扫描的方式采集最终位置和姿态信息。
在临床应用中,足够小的主从延时时间是医师完成微创手术的重要保障。测试过程中,使用位移传感器同时采集主端、从端参考点位移随时间变化的曲线。其中,主端设备参考点在200 ms 内从静止加速到80%额定速度,并在80%额定速度下匀速运动指定距离后,在200 ms 内减速到静止状态。定义主端设备参考点和末端执行器参考点开始运动的时间差为启动延时;定义在主端设备80%运动行程内,取主端设备参考点和末端执行器参考点在运动相同位移时的时间差的最大值为跟随延时。主端设备和末端执行器参考点位置变化曲线见图11。
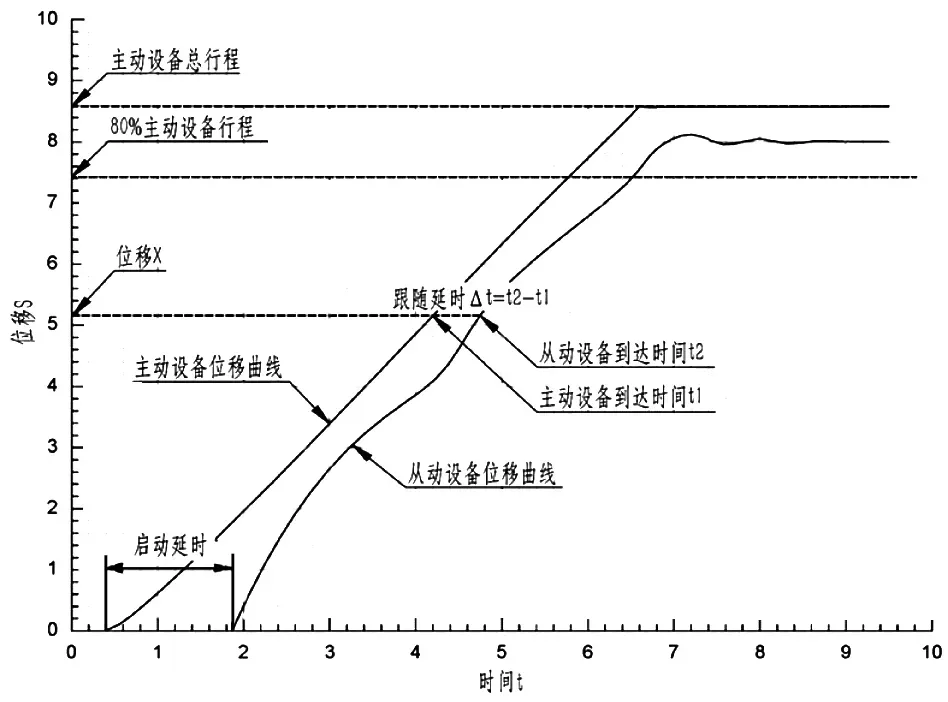
图11 主端设备和末端执行器参考点位置变化曲线
随着信息技术的发展,在可能存在的5G、wifi 主从操作端无线通信进行远程手术的情况下,制造商更应谨慎评估主从延时时间不稳定性带来的潜在风险。
3 小结
辅助手术医用机器人作为高风险医疗器械,在产品设计过程中应确保进行完善的风险分析,得出产品基本性能指标,给出避免风险产生的相关措施。
目前,国内对于辅助手术医用机器人的基本性能和电磁兼容要求还未形成标准化的方案,本文通过分析辅助手术医用机器人基本性能,归纳总结相关通用性规律,希望为建立辅助手术医用机器人基本性能标准提供技术支撑。
