基于动态后处理的无人机免像控测图方法
2021-10-20潘国富单弘煜
潘国富 单弘煜 赵 鑫
(广州市中海达测绘仪器有限公司, 广东 广州 511400)
0 引言
传统航空摄影测量作业使用载人飞机搭载专业航拍相机获取地面影像,成本高昂、技术复杂,同时还需要布置控制点,外业劳动强度大、项目周期较长。随着低空无人机技术的发展成熟,以拓普康和天宝为代表的外国地理信息装备企业率先将高精度卫星及惯性导航技术集成到低空无人机上,实现了1∶2 000大比例尺航测作业[1-2],但由于整体价格高昂、早期固定翼无人机安全性不足等问题,并未得到广泛推广运用。
近年来,国内厂商如飞马、纵横等公司开发的多旋翼及复合翼无人机大大提高了飞行安全性,成为航拍和三维激光雷达测图的主要飞行平台,同时国内研究开发的多镜头倾斜摄影测量专用相机[3]大大提高了倾斜摄影测量的工作效率。但由于价格依然较高,主要用户群体集中在大型测绘资质单位等高端用户。
本文针对面积的1∶500测图及三维建模项目需求,以低成本的大疆P4R无人机作为航测平台,利用动态后处理(Post Process Kinematic,PPK)技术获得相片成像瞬间的精准位置,从而取代地面像控点、免除了外业测量工作,最后通过实际案例,介绍无人机航测的实施过程并对精度进行验证。
1 无人机测图工作原理
无人机测图是通过控制无人机在一定的高度及航线上飞行进行拍照,获取地面上一定重叠度及一定分辨率的影像后利用摄影测量技术进行数据处理,获得地面点坐标的方法;一般无人机航测流程如图1所示。
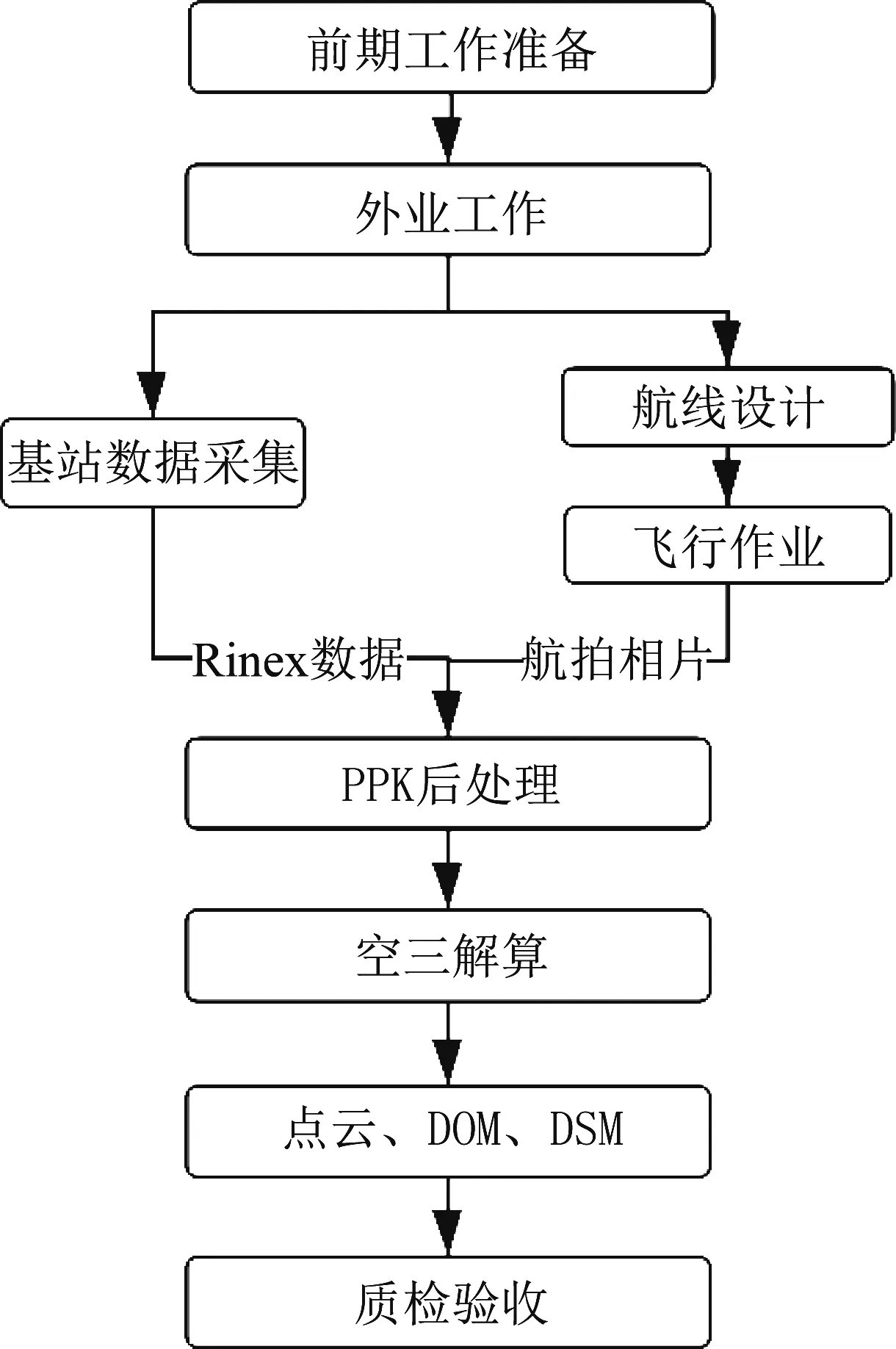
图1 无人机航测流程图
航线设计需要根据相机的分辨率、测区地形高差起伏等情况对航高、飞行路径等参数进行合理设计,文献[4]给出的无人机的飞行高度计算方法如式1所示:
(1)
式(1)中,f为物镜焦距;α为像元尺寸;D为地面采样距离,是衡量无人机影像区分相邻地物最小距离的指标,其大小按所需成图比例尺确定[5],通常1∶500测图要求D≤0.05 m。考虑到地形落差较大容易导致影像重叠率不同或影像分辨率不足的问题,在山区丘陵等地形复杂测区作业时可使用随地形飞行技术[6],以尽量保证无人机相对地面的航高固定。
2 关键技术研究
2.1 大疆P4R无人机飞行平台
大疆在2018年推出了带有全球导航卫星系统(Global Navigation Satellite System,GNSS)双频定位模块及高精度螺旋天线的精灵4(Phantom 4RTK) 多旋翼无人机,通过配备防抖云台、相机使用机械快门(全局快门)成像技术有效降低航拍过程中的图像变形(果冻效应);同时整机实现了飞控、云台相机及GNSS时钟系统微秒级同步,可根据飞机姿态、云台姿态对相机的中心位置进行补偿,保证每张照片均直接输出厘米级精度的中心位置;再加上简单易用的飞控系统,显著降低了无人机操控的技术门槛,这两年在建筑、测绘、电力巡检等行业领域得到普及应用[7-9]。
2.2 PPK数据处理模型
飞行作业完毕后,导出机载GNSS数据及影像数据,与基站数据进行事后差分解算,从而获取厘米级的精度[10]。本文PPK解算引擎采用卫星间、接收机间组双差的模式进行解算,消除星轨道误差、卫星钟差、电离层误差、对流层误差、接收机钟差等误差,观测方程如式(2)~(4)所示:
(2)
(3)
(4)
式中,P、φ分别为接收机的伪距和载波观测值;ρ为卫星到接收机的几何距离;δ为轨道误差;c为光速值;ts,tr分别为每颗卫星和接收机的钟差;T为对流层延迟;I为电离层延迟;ds,dr为卫星和接收机的伪距硬件延迟;ds′,dr′为卫星和接收机的载波硬件延迟;λ为载波波长;N为整周模糊度;ε、ξ分别为伪距与载波的残余误差、用于吸收多路径误差、内部噪声等误差。
动态后处理方法相比实时动态差分法(Real-Time Kinematic,RTK)没有差分延迟,因此,精度更高,且通过正反向两次滤波解算,获得固定解的成功率更高。
2.3 PPK解算流程
PPK解算的流程包括数据预处理、模糊度浮点解、模糊度固定、基线解算等几个步骤,总体流程如图2所示。
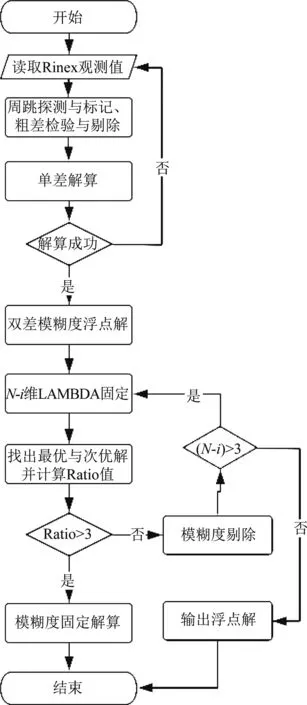
图2 PPK解算流程图
数据预处理环节主要目的是周跳探测及粗差剔除,周跳探测部分综合采用GF组合法、历元间差分法及多普勒积分法进行探测,对于残差超过阈值的观测值进行剔除,小于阈值的定权后使用。参数估计首先通过单差观测值模型进行,获得单差模糊度的浮点解及方差协方差阵,通过误差传播定律得到待固定的双差模糊度浮点解及方差协方差阵。
本文整周模糊度的求解策略采用最小二乘模糊度降相关平差法(Least-square Ambiguity Decorrelation Adjustment,LAMBDA),主要分为降相关及模糊度快速的搜索两步。在模糊度固定成功后还要对其进行可靠性检验,常用的Ratio检验代表最优解和次优解的可区分程度,ratio检验阈值一般采用3为经验值。
有关特殊水热环境的湿地和农田生态系统温室气体的研究比较少[34]。已有的研究区域大多位于北纬45°以北,及少数低纬度、高海拔(3000米以上)地区的相关研究[15,34,50]。而在中纬度温带地区的生态系统类型更多、面积更广、气候变异更大,目前关于这些地区的温室气体排放特征尚不明确[34],从高纬度、高海拔地区所得到的研究结果是否能够完全或部分适用于中纬度地区也尚不明确,因此扩大相应研究区域也是有必要的。
随着卫星数的增多,待估模糊度个数N也显著增大,一次性估计全部的模糊度并未现实也不必要,本文采用部分模糊度固定方法进行模糊度剔除,模糊度剔除的个数为i,为了保证最终固定解精度,常需满足N-i>3,即至少固定4个模糊度参数。固定完模糊度之后可根据模糊度浮点解的方差协方差阵,模糊度固定值计算得到高精度的基线分量的结果,如果模糊度固定失败,直接输出浮点解。
3 实验案例
3.1 测试方法
测试地点位于笔者所在科技园区,首先在路面上选择8个在卫星影像上易于辨识的斑马线角点作为地面控制点集(编号为P1至P8),然后用高精度双频RTK设备采集各点位坐标(固定解30 s平均值,解算精度优于2 cm),各点位分布及航线规划如图3所示。
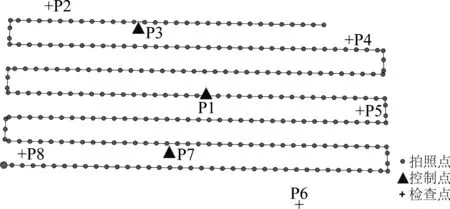
图3 实验航线规划图
3.2 外业数据采集
首先,将卫星接收机基站架设在已知点上,量取仪器高后以1 Hz采样间隔进行静态数据采集。同时根据地面分辨率的与成图比例尺的关系计算航高、相片重叠率的要求进行航线规划,本文测试飞行任务使用的参数如表1所示。

表1 航线规划参数
大疆无人机飞行操控直观,同时具备避障、自动返航等设计,基本可以实现傻瓜化航拍。
3.3 PPK数据处理
外业结束后,导出基站数据及无人机载数据,即可进行PPK数据处理,本文软件以不同颜色表示各相片位置的解算,结果如图4所示。
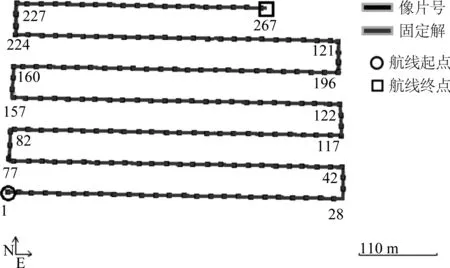
图4 PPK解算结果
从图4可以看到,经过两次滤波解算后所有点位均得到固定解,说明本文PPK算法正确可行,PPK解算完成后直接导出文本格式的POS成果用于空三解算。
3.4 空三解算
本文使用Pix4Dmapper软件进行空三处理,该软件是瑞士Pix4D公司研发,软件使用严密的光束法区域网平差方法[11],可快速完成空三加密,数字地表模型(Digital Surface Model,DSM)、数字正射影像(Digital Orthophoto Map,DOM)数据的生产,已在国内外实际项目中得到普遍验证,获得点云数据、DOM及DSM成果如图5~7所示。
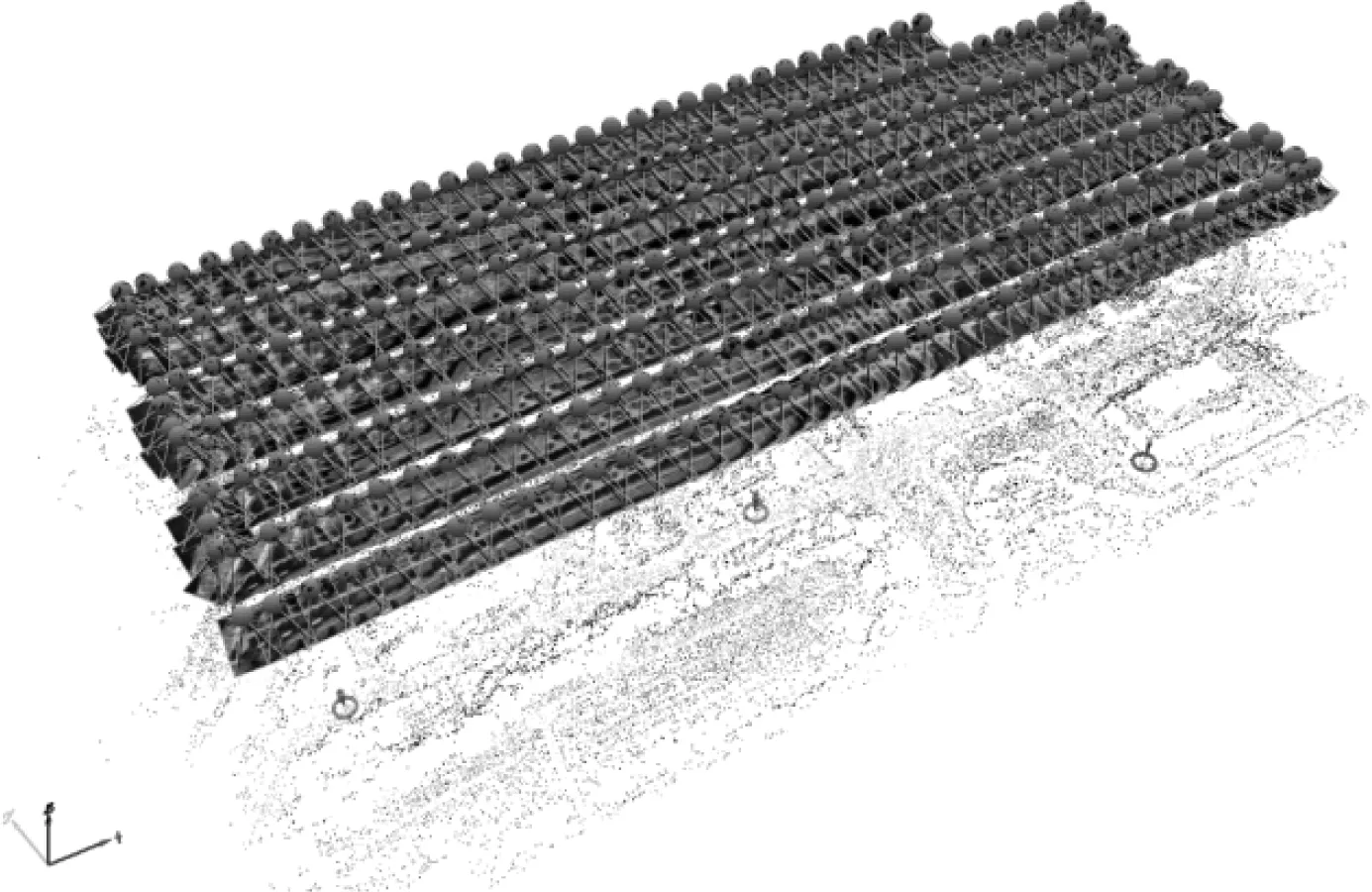
图5 空三点云成果
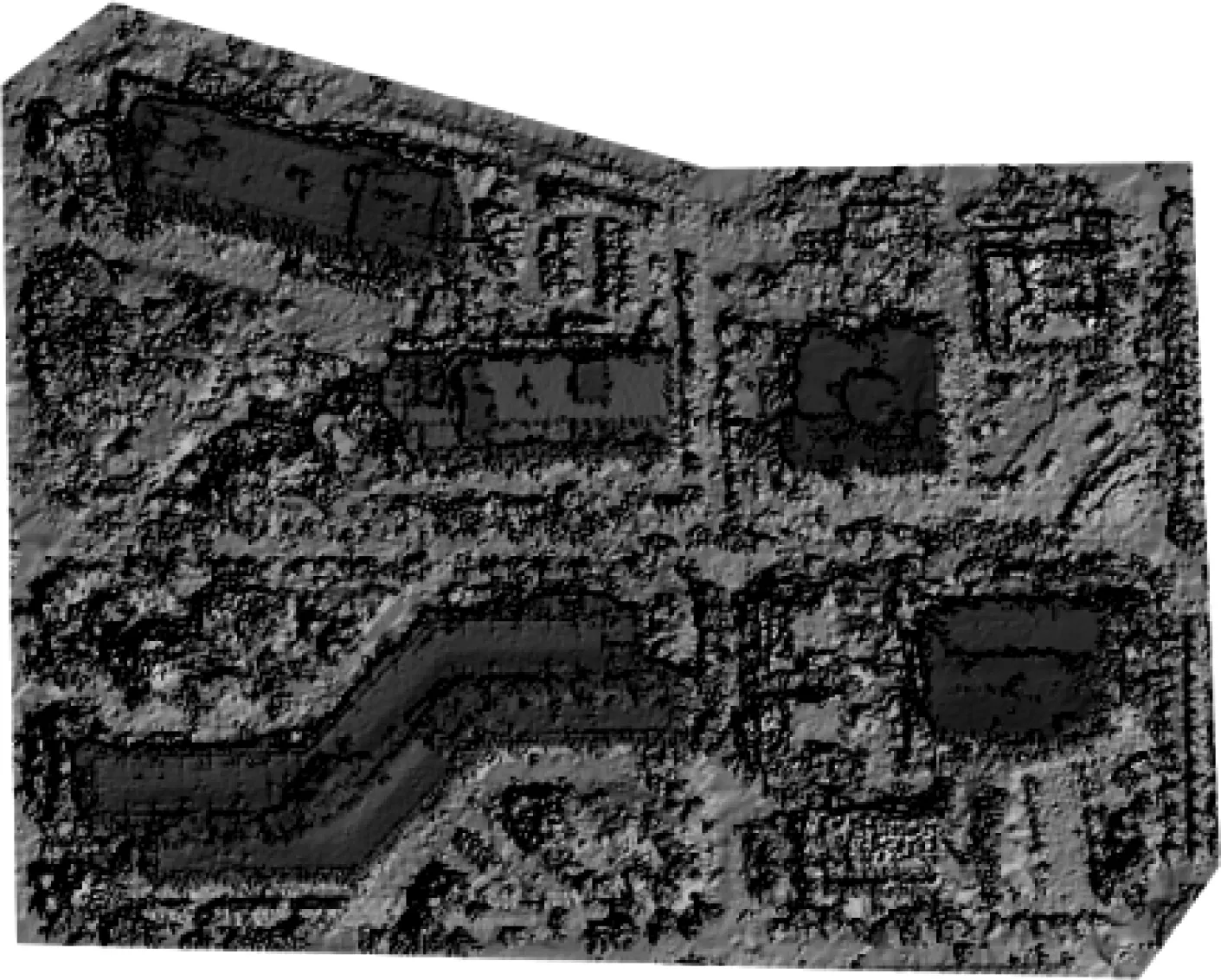
图6 空三DSM成果
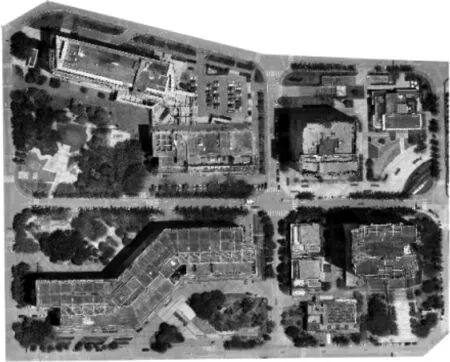
图7 空三DOM结果
4 精度统计
将Pix4Dmapper所生成DOM与DSM成果加载到QGIS (Quantum GIS,一款免费GIS软件)软件中刺点查询获得测试点位的坐标,与RTK测试结果对比获得北方向误差dX,东方向误差dY,高程方向误差dZ后计算各点的点位误差dS计算公式见式(5):
(5)
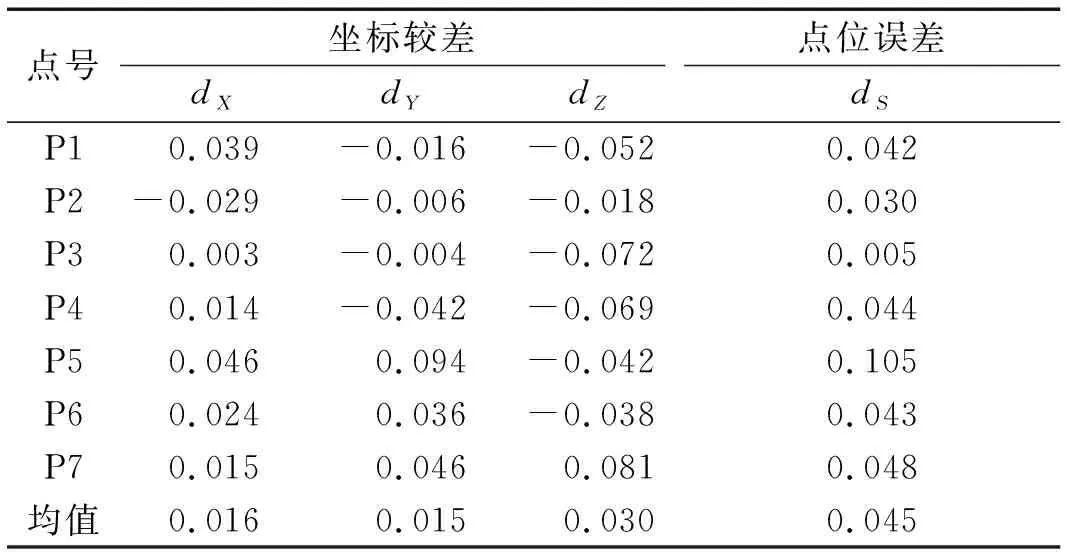
表2 测试精度统计 单位:m
从测试统计结果看到,P5点的平面和高程精度相对于其他点位精度明显降低。分析原因为该点位于航线边缘,缺少重叠影像,在实际作业中可将飞行区域外延两个以上航线宽度以改善该问题,从而获得更好、更均匀的测量精度。
其余点位精度均符合测量规范要求。
5 结束语
随着国内无人机飞行平台、各种载荷、成图建模软件的成熟,无人机已经成为地理信息数据采集的重要工具,本文介绍了利用大疆P4R无人机结合PPK后处理技术进行免像控1∶500测图的技术原理及作业流程,实测结果表明:
(1)消费级无人机P4 RTK结合PPK方法进行小场景航测的精度能够满足1∶500大比例尺测图需求,开阔场景无须布设地面像控点。
(2)本文PPK软件在国内商业化推广多年,算法可靠,软件稳定,满足工程应用需要。
(3)本文实验场地相对平坦,未能在地形起伏较大的项目中验证,未来可以在机载高精度定位盒子中加入惯性传感器[12],减少航拍过程中因风力所致飞机倾斜引起误差,同时可将单机模式的PPK数据处理转变为云服务模式,进一步提高生产效率。