光学表面成像系统实时运动监测精度研究
2021-10-16陈黎白龙李光俊全红柏森
陈黎,白龙,李光俊,全红,柏森
1.四川大学华西医院肿瘤中心放疗科,四川成都610041;2.武汉大学物理科学与技术学院,湖北武汉430072
前言
根据国际辐射单位委员会建议,肿瘤放疗剂量的准确率应在5%以内[1],但是患者在治疗期间的运动会降低剂量输送的准确性。在各种运动中,呼吸运动是导致剂量不确定性的主要来源[2-3],呼吸门控技术是管理呼吸运动的重要手段[4-6],这种技术需要获得患者体表的呼吸信号作为门控信号。呼吸信号的监测精度会影响门控治疗的准确性[7],因此在临床使用前应评估和验证监测系统的准确性。本研究的主要目的是探究光学表面成像系统实时运动监测的精度。
1 材料与方法
1.1 病例来源
专业呼吸运动模体QUASAR的控制软件包含了RPM、Anzai等临床常见的呼吸运动监测系统记录的呼吸曲线,从中随机挑选30例患者的呼吸曲线用于临床测试。
1.2 Catalyst系统和运动模体
Catalyst光学表面成像系统(C-RAD公司,瑞典)[8-10]包括3个高清摄像机,彼此相隔120°分布在治疗床周围,使用光发生器来形成患者体表的图像,并通过CCD相机捕获重投影,同时采用红色光源和绿色光源将计算出的实时体表图像与参考图像的误差直接投影到患者体表。该系统在x、y、z方向的最大扫描范围分别为800、1 300、700 mm,扫描速度为80帧/s[11]。Catalyst系统包含3个应用模块:C-Positing用于患者精确摆位,C-Motioning用于监测患者治疗过程中的运动,C-Respiration用于呼吸门控或实时追踪放疗[12]。
QUASAR可编程呼吸运动模体可以通过软件控制移动平台以可变的速度和振幅运动[13-14]。设置步进电机的最大加速度为90 mm/s2,最大速度为80 mm/s,移动平台的最大运动范围为±15 mm。
1.3 实时运动监测精度的测量过程
在Catalyst系统的预设窗口中选择合适的扫描体积并调整摄像机的扫描参数[15]以获得符合临床要求的图像,并采集参考图像。在C-Respiration模块中将监测点的位置移动到模体的探测平面上,从而监测其运动,设置呼吸运动监测点的半径为10 mm。
将患者的呼吸曲线输入到模体的软件中,使其模拟呼吸运动。对于复杂的呼吸运动,模体的实际运动与输入的呼吸信号之间可能存在误差,因此以软件记录的实际运动曲线作为参考曲线。使用Catalyst系统监测模体的运动,对每条呼吸曲线的监测时间不少于120 s。比较系统监测到的呼吸曲线与参考曲线,得到光学表面成像系统实时运动监测的精度。
1.4 统计学分析
对光学表面成像系统监测的呼吸曲线与参考曲线做相关性分析,使用平均值和标准差对监测误差进行量化,同时对所有的呼吸曲线做傅里叶变换进行频谱分析。傅里叶变换是一种数学变换,可以将曲线从时域变换到频域,揭示呼吸曲线所包含的频率成分信息[16]。通过对呼吸曲线包含的频率成分做误差分析,分析系统对不同频率特点的曲线的监测精度。
2 结果
Catalyst系统监测的呼吸曲线与参考曲线具有较高的一致性,如表1所示,相关系数均大于0.99,显著性分析中P<0.05,均显著相关,这表明Catalyst系统对病人实际的呼吸曲线有较高的实时运动监测精度,可用于临床上对患者的呼吸运动进行实时监测。
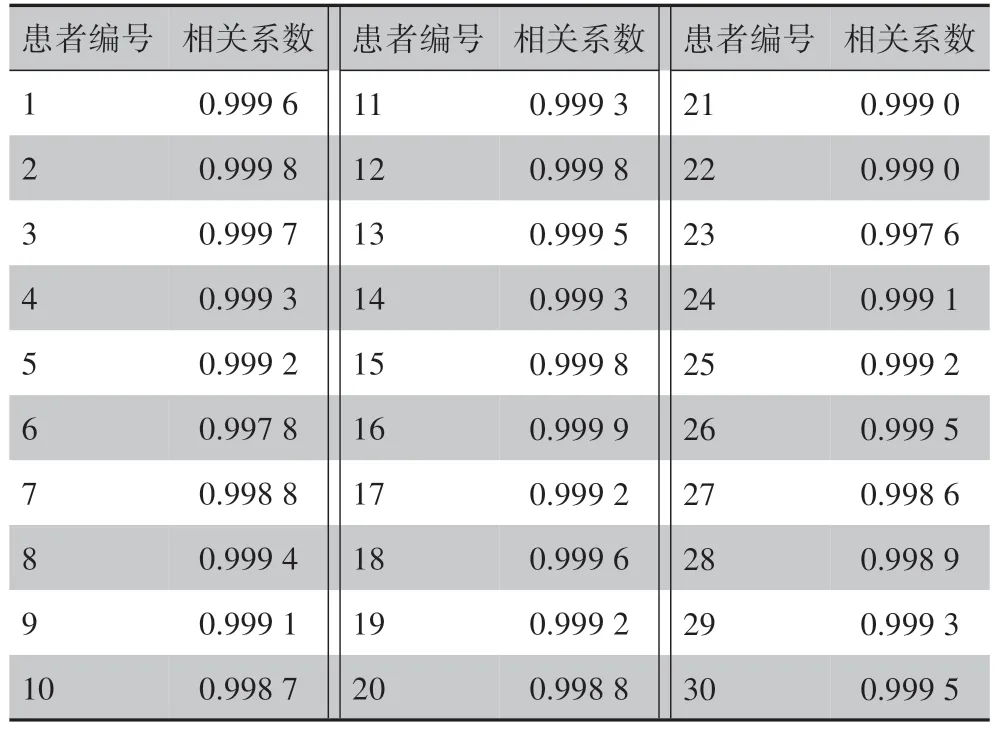
表1 Catalyst系统记录的呼吸曲线与参考曲线的相关性分析Tab.1 Correlation analysis between respiratory curves recorded by Catalyst system and reference curves
图1 展示了其中3 例患者呼吸信号的线性相关性分析结果,从图中可以看出系统监测的呼吸曲线与参考曲线有较强的相关性。定量分析表明,Catalyst 系统的监测误差为(0.24±0.04)mm,最大测量误差为(0.33±0.05)mm。
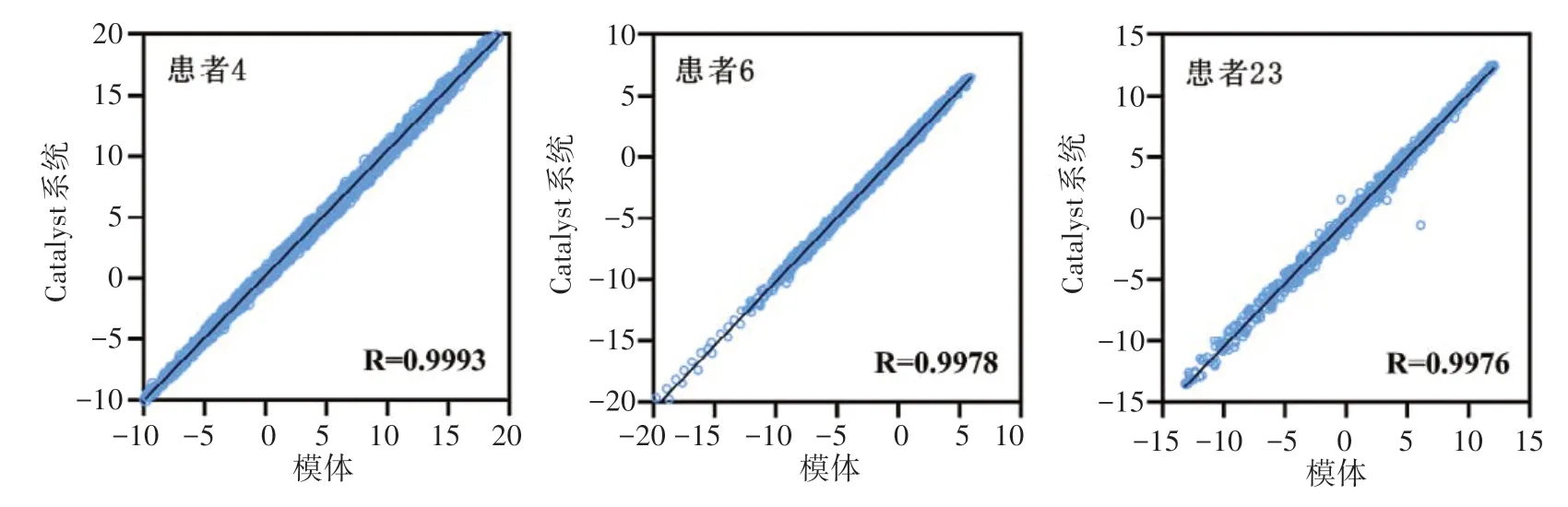
图1 3例患者监测的呼吸曲线与参考曲线的线性相关性分析Fig.1 Linear correlation analysis between recorded respiratory curves and reference curves of 3 patients
对所有呼吸曲线做傅里叶变换,通过频谱分析可以发现呼吸信号的主要频率成分小于0.8 Hz,图2展示了其中2例患者的呼吸曲线在时域与频域中的分布,从图中可以看出呼吸信号主要频率成分不同,但均小于0.8 Hz。

图2 2例患者呼吸曲线的时域图(左)与频域图(右)Fig.2 Time-domain(left)and frequency-domain diagrams(right)of the respiratory curves of 2 patients
通过对所有呼吸曲线做频谱分析,可以发现系统的监测误差随着频率的增加而逐渐减小,如图3a所示,其中在0~0.4 Hz的频率范围内误差相对较大,表明Catalyst系统对变化较快的呼吸曲线有更好的监测精度,当患者的呼吸曲线变化较慢时测量误差相对较大。图3b展示了所有患者呼吸曲线的监测误差,均不超过0.4 mm。
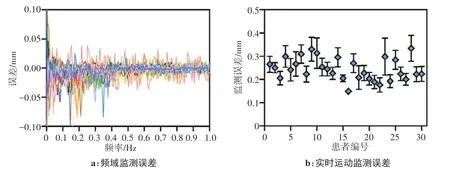
图3 Catalyst系统记录曲线在频域与时域中的误差分析Fig.3 Frequency-domain and time-domain error analyses of respiratory curves recorded by Catalyst system
3 讨论
Catalyst系统是一种立体成像系统,基于可见光对体表进行实时运动监测,使用有限元模型对实时图像与参考图像进行形变配准,将曲面图像与参考图像和内部解剖结构相关联[9]。目前临床上使用较多的红外监测系统需要在患者体表放置反射块,操作较为复杂,而光学表面成像系统在临床使用过程中操作简便,不会额外增加治疗时间。
在临床实践中,考虑到肿瘤的运动、摆位误差等因素需要对临床靶区(CTV)或内靶区(ITV)进行外扩,生成用于临床治疗的计划靶区(PTV)。这种外扩确保了目标体积在治疗过程中可以接受处方剂量。但是在进行门控治疗时,需要实时监测患者的呼吸曲线作为门控信号,系统的监测误差将会导致门控治疗的不准确,不能忽视。通过对Catalyst系统实时运动监测误差的分析可以发现监测误差接近0.4 mm,因此从CTV/ITV到PTV的外扩还应当包含呼吸监测系统引入的不确定性。
图4展示了Catalyst系统监测的呼吸曲线以及相应的参考曲线,从图中可以看出当患者处于呼吸曲线变化较大的吸气或者出气阶段时监测误差较小,而当患者处于呼吸曲线变化相对较小的吸气末阶段时系统监测误差相对较大,与频谱分析的结论一致。因此在患者进行呼吸门控治疗时,可以对患者进行呼吸训练,避免患者在吸气末无意识屏气造成的监测误差,从而影响门控治疗的准确性。

图4 4例患者的Catalyst系统记录呼吸曲线与参考曲线对比Fig.4 Comparison of respiratory curves recorded by Catalyst system with reference curves of 4 patients
目前对定位和追踪系统的实时运动监测精度已经做了相关研究[17-19],但是主要是针对红外监测系统。Kauweloa等[17]利用RPM和Gate CTTM分别对患者的呼吸曲线进行实时运动监测,对应的皮尔逊相关系数范围分别为0.998 9~0.999 8和0.997 7~0.999 9。Zheng等[7]分别评估了RPM和BrainLAB ExacTrac的监测精度,皮尔逊相关系数的结果介于0.932~0.990。上述研究中的监测系统均为单探头的红外监测系统,需要在患者身上放置反射块,操作复杂,可能会增加患者的治疗时间。本研究中使用的Catalyst系统采用3个探头,不需要使用反射块,可以更好地获得患者的体表图像,相比红外监测系统,有明显的优势。其次,对监测精度的分析表明光学表面成像系统同样具有较高的实时运动监测精度,可以用于临床患者的实时运动监测。
4 结论
光学表面成像系统作为一种体表监测系统,可以在患者治疗期间实时监测患者的呼吸运动,具有较高的实时运动监测精度。在进行门控治疗时,应当测试监测系统对呼吸运动的监测精度,将系统的监测误差纳入CTV/ITV外扩边界大小的考虑中。
