数字液压AGC系统的位置控制方法研究
2021-10-15张保林
张保林
(山西路桥集团交通机电工程有限公司,山西 太原 030024)
引言
闭环控制系统的液压自动增益控制系统具有响应速度快、控制精度高等特点。高速开关阀相对于伺服阀在液压自动增益控制系统中有更多的应用,同时控制准确度和响应的快慢是必须要考虑的因素[1-3]。因此,本文结合不同控制方法来研究数字液压自动增益控制系统的响应速度,使自动增益控制位置闭环控制系统能快速、准确地调整液压缸的位置。
1 基于传统PID控制的数字液压AGC系统
当切换高速开关阀时,局部机械摩擦及交流电产生的磁力会影响到高速开关阀内部。为了解决高速开关阀流量控制不准确的问题,通过改变其占空比,有效地消除了流量控制的不活跃区域和不确定区域[4]。
高速开关阀占空比输入方程如公式(1)(2):

式中:τ和τ'均表示占空比,τ由闭环控制系统相互作用得出;τ'由比例交换作用后得出;S表示缸体移动所需的参数;x表示缸体运动距离。
根据数字液压自动增益控制系统的PID控制原理和各部件的数学模型,利用Simulink仿真软件建立闭环系统仿真模型[5]。研究了脉宽调制控制对PID控制系统的影响及脉宽调制控制对自动增益控制液压缸运动位置的控制特性。基于液压AGC系统的特点,在线精调时,调整量一般在0.1 mm左右,因此本次模拟所需的位移调整量S设定为0.1 mm。仿真模型如图1—图4所示。

图1 闭环系统基于PID控制的位置仿真模型

图3 传统PWM控制模块

图4 占空比线性转换PWM控制模块
在图2的控制系统中,上部运用了PID和占空因数影响PWM的控制系统,下部运用了PID和传统PWM相结合的控制系统。PID控制器的三个影响因子如下:KP=15,KI=0.004 7,KD=4。

图2 占空比线性转换前后仿真系统对比
结合两大系统对比研究缸体位移基于高速开关阀的效果,缸体移动的位移曲线如下页图5所示。
在下页图5中,细实线(——)表示的是PID与占空比转换PWM结合的气缸移动反馈曲线。开始时,两条曲线重叠并呈直线上升。主要原因在于开始时占空比数值保持1不变,在高速开关阀继续保持开启状态时,高速开关阀内部依然运作,PWM系统没有发挥作用,此时缸体保持恒定运动状态;当缸体排量越来越大时,PWM系统开始发挥作用,曲线趋于水平。在PWM系统开始发挥作用时,缸体的移动总量与预估值非常接近,高速开关阀对于排量的精准把控使得缸体的移动易于控制。

图5 传统PID缸体移动反馈曲线
由此得出,之前的PID控制器可以控制缸体移动的距离,基于由计算机控制的自动液压系统,而占空比线性转换PWM系统可以使得缸体的位移更容易控制。所以,通过比例积分微分控制和占空比线性转换脉宽调制控制相结合的控制策略,可以通过高速开关阀对计算机控制的自动液压缸体进行精确控制。
2 基于模糊自适应PID控制的数字液压AGC系统
根据模糊自适应PID控制原理和计算机控制的自动液压控制系统中所建立的各种二维几何图形,通过研究其他中小型板材轧机,并通过二维软件建立仿真模型[6]。此外,在基于占空比线性转换脉宽调制控制的系统中运用模糊自适应PID控制系统和传统的PID控制系统时,高速开关阀对计算机控制的自动液压缸的位移具有很稳定的控制特性,而且其系统的稳定性也较优良。因为液压AGC系统的稳定性,在调整其精度时,调整的大小不宜太大,所以本次仿真将所需要的初始值定为0.2 mm。仿真模型如图6—图8所示。

图8 模糊控制模块
在图6的模型中,上部运用了PID和占空因数影响PWM的控制系统,下部运用了PID和传统PWM相结合的控制系统。PID控制器的三个影响因子如下:KP=15,KI=0.004 7,KD=4。结合两大系统对比研究缸体位移基于高速开关阀的效果,缸体移动的位移曲线如图9所示。

图6 基于模糊自适应PID控制与传统PID控制的位置闭环系统对比图

图7 模糊PID控制模块
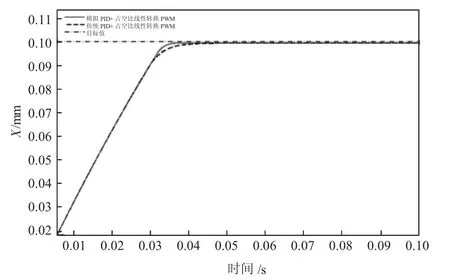
图9 模拟PID缸体移动反馈曲线
在图9中,细实线(——)表示的是PID与占空比转换PWM结合的气缸移动反馈曲线,时间开始时,两条曲线重叠并呈直线上升。主要原因在于开始时占空比数值保持1不变,在高速开关阀继续保持开启状态时,高速开关阀内部依然运作,PWM系统没有发挥作用,此时缸体保持恒定运动状态;当缸体排量越来越大时,采用模糊自适应PID控制的系统比传统PID控制的系统具有更快的响应速度和更优良的控制特性。缸体加压时的反馈速率低于35 ms,符合AGC控制系统对反馈速率的标准。因为传统和模糊自适应的两个控制系统均运用了PWM控制,缸体具有优良的可控性能。
由以上研究可以得出,模糊自适应控制器和PID控制器相结合的系统可以增加系统的反馈频率,提高系统的精确控制性能。所以,模糊PID控制器和占空比的线性转换相结合的系统具有控制精度高、输出性能优良的特点。高速开关阀可以快速、准确地调节自动增益控制液压缸的位置,从而取代液压自动增益控制中的伺服阀,降低系统功耗,提高系统耐用性。
3 结语
本文将占空比线性转换PWM控制分别应用于传统PID控制和模糊自适应PID控制,分析了计算机控制下的自动液压系统如何进行精确控制位移大小,同时研究了基于两种控制系统下高速开关阀对计算机控制下的自动液压系统的液压缸体的影响,并进行对比分析得出,模糊自适应PID控制器和占空比的线性转换相结合的系统具有控制精度高、输出性能优良的特点。在控制系统中运用模糊自适应PID控制器会增加控制系统的稳定性,并会优化控制系统的反馈速率。
