采煤机自动截割识别系统的应用研究
2021-10-15王磊
王 磊
(山西宁武德盛煤业有限公司,山西 忻州 036700)
引言
在综采工作面中,采煤机作为最重要的采煤设备,通常使用滚筒进行采煤。由于煤矿开采工况恶劣,仅仅依靠简单的可视化,采煤机操作人员无法准确判断滚筒是否在切割煤、岩石或带矸煤[1-2]。这可能会导致出现煤炭质量差、采矿效率低的问题。此外,在煤矿中,许多事故的发生越来越频繁。产生这些问题的主要原因是煤矿设备的自动化水平过低。随着自动化技术的发展,采煤机的自动控制越来越受到人们的重视,对采煤机工作状态进行准确监测对采煤机的自动控制起着重要作用[3]。因此,研究采煤机切削模式识别已成为一个具有挑战性和重要意义的课题。
虽然许多煤岩识别方法有所发展,但它们都有一些共同的缺点。首先,煤岩探测器结构复杂,对煤层地质条件的要求过于苛刻,不能满足在实际生产中的广泛应用。此外,煤层中包含的煤矸石条件对识别率有敏感影响。而且由于实际生产操作条件恶劣,大多方法与实际不相符,无法满足实际领域的需求,误差较大[4]。在此背景下,本文参考了传统设备的故障诊断和模式识别方法,重点研究了采煤机切割模式识别方法。传感器广泛应用于模式识别和诊断系统中,通过提供机器的信息来解决感知问题。利用振动采集状态信息已成为一种有效的方法。在这方面,基于振动的分析是最常用的方法,也被证明对各种实际应用有效。对于采煤机来说,摇臂是关键部件,摇臂的振动能够综合反映采煤机的切削工况,通过对传感器信号进行适当的测量和处理,可以正确诊断出采煤机的切削工况[5]。
1 基于改进果蝇优化算法的最小二乘支持向量机
SVM是模式识别中解决分类问题的常用方法,这种方法最早是由Vapnik于1995年所提出的,在最优化求解方式和统计学的基础上,LSSVM是由SVM扩展而来的,LSSVM将最小二乘法准则用在了最优化函数求解,而不是仅限于不等式。

其中:J为目标函数,1/2wTw为平面度测量函数;C是正则化参数,它决定了训练误差与模型平坦度之间的权衡;εi是松弛变量;w是权重向量。
果蝇优化算法(FOA)是Pan提出的一种新的群体智能算法,是一种最优化计算方法。FOA核心方法是通过让果蝇自己寻找食物的行为发现食物。在寻找过程中,果蝇首先通过它的眼眶器官嗅出一种特殊的气味,接着从它的周围伙伴那里进行信息的数据交互,并比较当前的位置和方向。果蝇通过味道参来识别最佳适合度值,并向适合度更好的位置飞去。它们用敏锐的视觉寻找食物,然后朝那个方向飞得更远。图1展示了一个果蝇群体的食物寻找迭代过程。
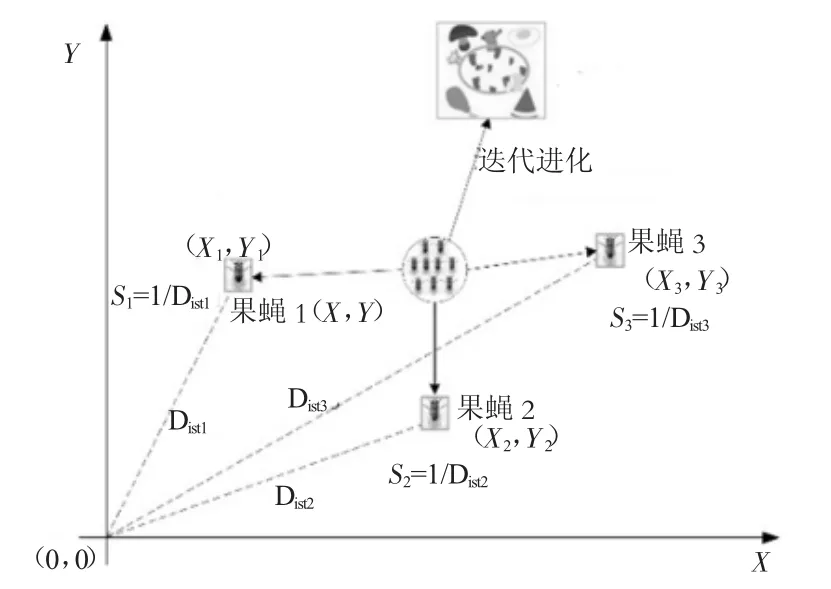
图1 果蝇算法搜索迭代过程
2 基于该方法的采煤机截割模式识别系统
基于该方法的采煤机截割模式智能识别实质上是一个模式识别系统,主要包括数据采集、特征提取和模式识别与预测三个部分。
2.1 数据采集
采煤机的切削模式诊断从数据采集开始,采集机械工作信息。振动信号采集是传感器实现的最常用的方法。本研究通过安装在自行设计的采煤机截煤实验系统中的4个传感器获取数据,如图2所示。

2-1采煤机截煤实验台

图2 自行设计采煤机截煤实验系统
在图2中,S1、S2、S3、S4表示位于摇臂上的四个加速度计。数据采集由多功能高速采集器完成,采集数据通过USB传输到电脑中。采样频率设置为12.0 kHz,采样时间为0.50 s。不同模式下传感器S1的振动信号如图3所示。

图3 传感器S1在不同切割模式下的振动信号
2.2 特征提取
在任何模式识别和故障诊断系统中,信号特征提取都是关键的初始步骤。提取精度对最终的识别结果有很大的影响,为了获得理想的机械模式诊断特征,目前有很多对信号的处理方法能够解决这一问题,其中小波变换和傅里叶变换应用更广泛。当故障发生时,可能会出现新的频率分量,并可能发生频谱收敛的变化。但是,对于弱信号,特征被强背景噪声淹没,传统的特征提取方法很难提取出有效的特征。采用集合经验模态分解(EEMD),这种方式在初始信号分解前参入高斯白噪声,从而解决频率混叠问题。该方法非常适用于非平稳和非线性信号。
2.3 模式识别和预测
在采煤机切削模式识别系统中,LSSVM作为模式识别和预测方法,被广泛应用于诊断采煤机的工作模式。采用果蝇优化算法在LSSVM中确定出最优训练参数。
3 工业应用
为了验证所提出的采煤机控制方法的应用可行性,开发了基于该方法的采煤机控制系统,并在某采煤工作面进行了工业试验。系统的基本结构如图4所示。从图中可以看出,加速度计安装在采煤机摇臂壳体内部,以保证其可靠性。振动信号通过无线开关采集并传输到防爆计算机中。计算机可以处理信号,并执行提出的方法来识别采煤机切割模式。同时,利用三维虚拟现实系统,实现了采煤机工作状态的可视化显示。

图4 采煤工作面工业试验系统
该方法的目的是准确识别采煤机的切割模式,为采煤机的自动控制提供依据。因此,前切割电机的切割电流(见图5)为采煤机从25~45 m工作时的曲线图。在该监测周期内,前切电流在32.689 4~37.776 9 A范围内变化,平均值为34.807 4 A。最大电流仅比平均值大8.53%左右。结果表明,根据该方法提供的识别结果,采煤机能够在煤层中平稳、安全的工作,在实际应用中证明该系统是稳定可靠的。
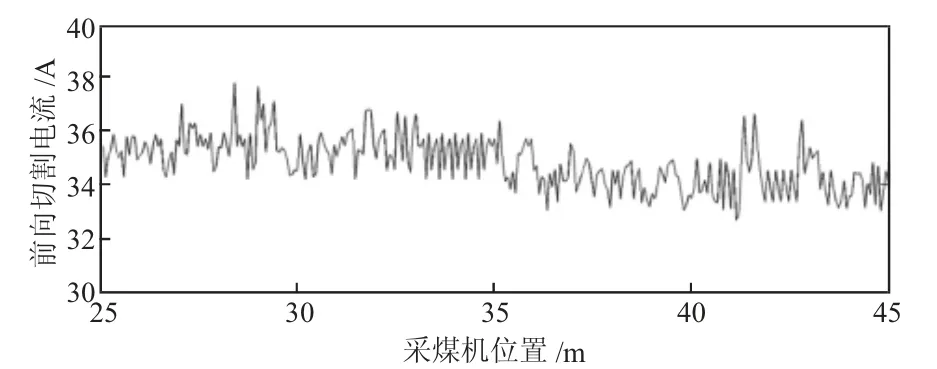
图5 前切割电机的切割电流波形图
4 结论
基于改进果蝇优化算法优化最小二乘支持向量机的采煤机截割模式的识别方法,利用IFOA自动选择合适的LSSVM模型参数,以提高预测和分类精度。将核特征与能量特征相结合,合理构造训练特征。工业应用结果表明,基于该方法的系统可为采煤机的自动控制提供稳定可靠的参考。
