联合空中搜救空间管控方法探析
2021-10-15闫静茹苏英振
闫静茹 苏英振
1.空军信息通信第一旅北京100095 2.空军指挥学院作战指挥系北京100097
自马航失联事件以来,联合空中搜救愈发受到各国重视,它不仅事关人员生命安全,而且影响国家形象和军队声誉.就本质而言,联合空中搜救是围绕搜救目标,由各型空中搜救力量于有限空间内,协调有序、相互配合,共同实施的特定作战行动.为达成最佳行动效果,空间管控理应成为联合空中搜救重点问题.
伴随联合空中搜救地位逐步提升,近些年,国内外涌现出大量有关联合空中搜救的理论研究成果,通过总结归纳,发现这些成果多从方法、技术、手段方面探索搜救组织实施问题,如文献[1]论述了最优化搜救航线在线规划方法;文献[2]阐述了搜救兵力编组问题;文献[3]针对多目标搜救问题,分析了搜救区域划分方法.这些成果大致包括搜救体系构建、搜救指挥协同、搜救区域确定、搜救力量配置、搜救路径规划、搜救方式选择等.但是,围绕搜救空间管控展开的研究分析较少,仅于文献[4]中,作者首次明确搜救行动的空间属性,并提出“空中搜救锥”作战概念[4],该概念对联合空中搜救行动给予较为系统的描述,指出“空中搜救锥”既是一种作战思想,也是一种战场空间,现已逐步运用于西部战区空中搜救实践中.
鉴于文献[4]的重要启示,本文着重围绕空间管控方法,先后引入“空间盒”、“高度协调线” 和“空中搜救锥”,依次针对联合空中搜救行动创建空间坐标体系、明确空间高度划分方法、构建“搜索”、“作战”、“救援”、“2 +X+Y+ 1”、“2 + 1” 模式锥体空间模型,以此展开对联合空中搜救行动空间管控问题的详细解析.通过区分联合空中搜救行动阶段,创新性建立不同模式下锥体空间模型,同时,分别探讨空间坐标体系、高度协调线和锥体空间模型在联合空中搜救空间管控方面的具体应用,试图为联合空中搜救空间管控问题研究填补理论缺失,并据此提供模型基础,对联合空中搜救行动进行更加形象、具体、生动地阐释.
1 基于“空间盒”建立空间坐标体系
空间盒是我军继全球区域参考系统之后,自行研究开发的全球区域坐标系统.联合空中搜救过程中,由于不确定因素较多,需各级指挥机构基于同一空间坐标体系,在搜救目标位置、搜救区域确定、搜救高度划分等方面达成一致,基于此,考虑将空间盒应用于联合空中搜救空间管控,具备较好可行性.
1.1 建立空间坐标体系
此处,决定以空间盒为参考基准,同时考虑时间因素对联合空中搜救的重要作用,将时间作为另一坐标横轴附加于空间盒之上,从而构建以空间盒为基准,同时兼顾时间要素,且能够覆盖全球区域范围的联合空中搜救空间坐标体系.如图1所示.图中,O点代表搜救起始点;A点代表搜救目标最后已知位置点;A′点代表t时间后预定搜救目标位置点;AA′视为搜救目标运动轨迹;OA′视为从搜救起始点出发,到达预定搜救位置的最短搜救航线;W−E轴代表搜救目标所在经度;N−S轴代表搜救目标所在纬度;H轴代表搜救力量所处高度;T轴代表搜救时间;tm代表搜救目标最大幸存时间;tjmax代表最大搜救截止时间;S代表搜救区域;设定以搜救区域S为底部,各型搜救力量汇聚形成的空间为搜救空间,以V表示;h为搜救空间V的顶部高度,即最高层搜救力量所处高度.如此,空间中任意一点便可通过坐标(W/E,N/S,H,T)表示,如预定搜救目标位置A′点,可表示为(E2,S2,0,t).
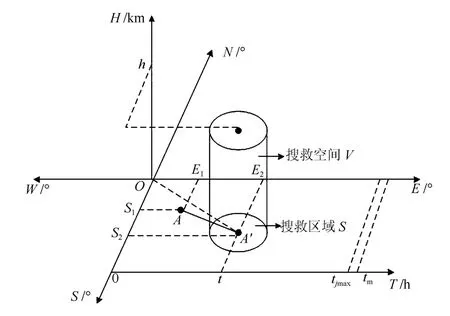
图1 联合空中搜救空间坐标体系Fig.1 Joint air search and rescue spatial coordinate syste m
1.2 空间坐标体系在空间管控方面应用
通过建立空间坐标体系,并在体系中设置相关参数,便可对联合空中搜救基本要素进行直观表述,同时,对于搜救空间管控,将成为一种实用工具.
1.2.1 标示搜救空间位置
设定某次联合空中搜救行动中,参与行动的搜救力量包括2 架搜救直升机、1 架武装直升机、1 架加油机、2 架歼击机和1 架预警机,如图2所示,A为搜救目标已知位置点,A′(E2,S2,0,t)为经过计算后,t时刻搜救目标所在位置点.2 架搜救直升机同时从O点出发,飞至A′点上空后,开始以A′为基点、R为搜寻半径、圆形区域S为搜救区域,对搜救目标展开扇形搜索;预警机负责空中侦察与监视,高度为h1;歼击机负责敌情侦察和对空作战,高度为h2;加油机负责空中加油,高度为h3;武装直升机负责伴随掩护,高度为h4;搜救直升机负责搜索发现和悬停吊救,高度为h5.
由图2 可以看出,预警机位于搜救区域顶部,其次为歼击机、加油机、武装直升机、搜救直升机,各型搜救力量按照各自高度分层配置,从而构成特定搜救空间.此时,扇形搜救空间可看作以A′为底面中心点,R为底面半径,搜救区域S为底面,预警机飞行高度h1为高度构成的圆柱体.搜救空间底面中心点为A′(E2,S2,0,t),搜救空间顶面中心点为C(E2,S2,h1,t).
1.2.2 计算搜救空间容量
设定搜救空间容量为V,以图2 中扇形搜索方式为例,可将扇形搜救空间容量表示为:
此时,搜救空间容量V可理解为以搜救目标位置点为基准,通过合理配置各型搜救力量,所构成的搜救空间容量.同时,也可用于衡量特定搜索方式下,搜救空间所能承载的搜救力量规模.
1.2.3 空间管控具体方法
在统一表述搜救空间位置,并完成特定搜索方式下搜救空间容量计算后,便可根据上述分析结果,对搜救空间实施有效管控.
一是通过优化配置搜救力量实施.特定搜索方式下,为进一步缩小搜救范围,有效规避敌方侦察与监视,同时节约搜救成本,需要在完成搜救任务的前提下,尽可能约束搜救空间容量,通过优化配置搜救力量,尽量选用数量最少、性能最强的搜救设施实施搜救行动.
二是通过辨别空中作战态势实施.当我方成功占据空中优势时,可适当扩大搜救空间,以确保在较大范围内快速完成搜索发现.而当未能占据空中优势时,可适当缩小搜救空间,以确保搜救行动自身安全.
三是通过空中搜救行动阶段实施.搜索发现阶段,通常将武装直升机与搜救直升机并行配置,以便更好地实施伴随掩护,从而使搜救空间大致呈现为圆柱形.悬停吊救阶段,则需将搜救直升机配置于最底端,使其在较低高度保持稳定悬停状态,同时,将预警机、歼击机、歼击轰炸机适当向外配置,以便在较大范围内对敌构成侦察探测与警戒打击压力,从而使搜救空间大致呈现为锥形.
2 基于“高度协调线”划分空间高度层
高度协调线,是为避免空军飞机、海军飞机、陆军直升机、无人机和常规导弹间飞行矛盾,对空域内飞行高度层进行科学区分,所采取的一种指挥控制措施.由此,决定将高度协调线应用于联合空中搜救空间管控,以便完成搜救空间高度配置.
2.1 建立搜救空间高度协调线
现依据高度协调线基本原理,在联合空中搜救空间坐标体系基础上,建立联合空中搜救空间高度协调线,并进行高度层划分.如图3所示.通过区分搜救力量类型,于搜救空间内设置2 个缓冲区,分别为S1、S2.缓冲区S1上沿高度为H11,下沿高度为H12,缓冲区S2上沿高度为H21,下沿高度为H22.设定遇险人员存活时间为tm,最大搜救截止时间为tjmax,高度协调线生效时段为(0,tjmax),各型搜救力量高度层配置,以及在搜救行动中担负任务情况如表1所示.
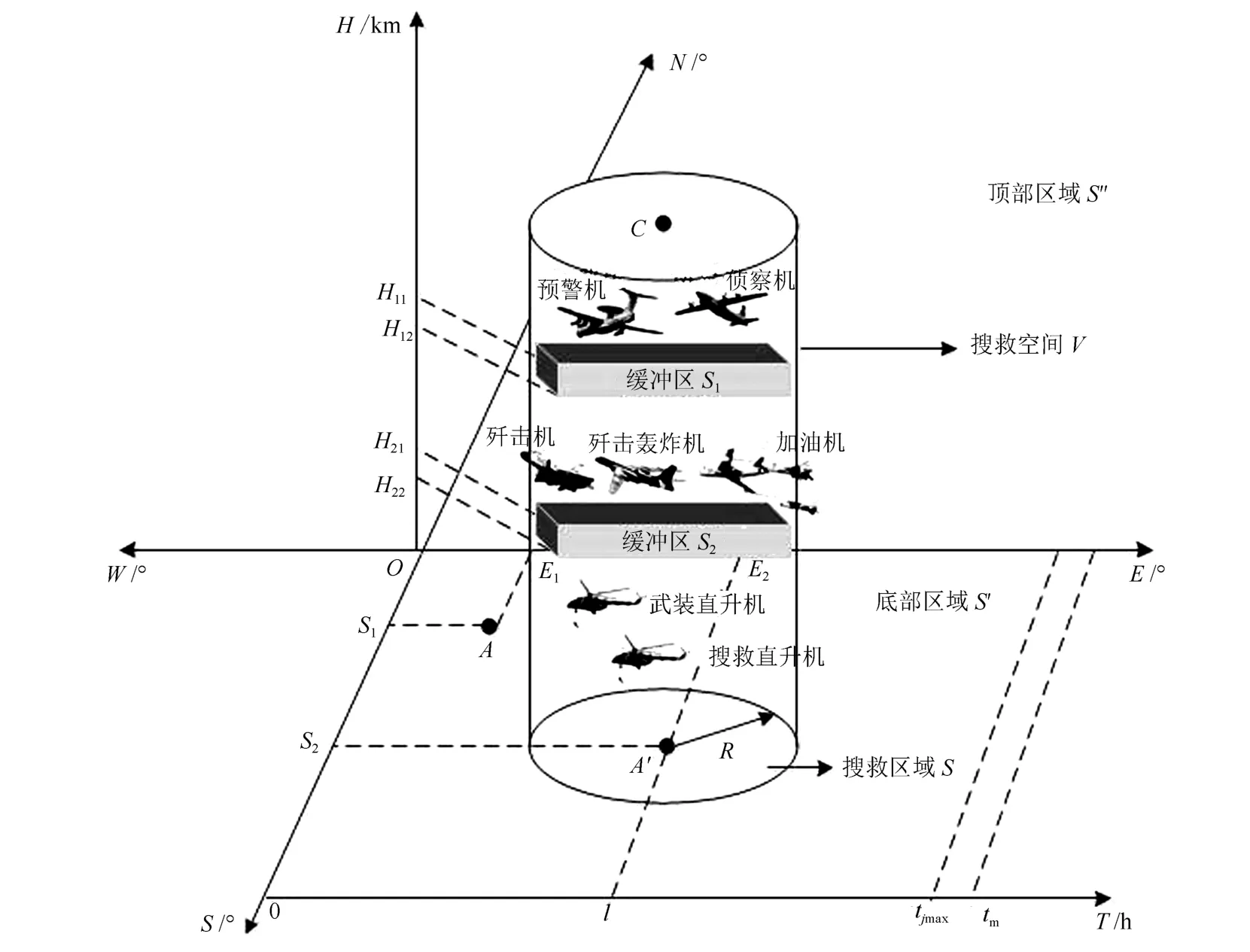
图3 联合空中搜救空间高度层划分情况Fig.3 Joint air search and rescue space altitude division
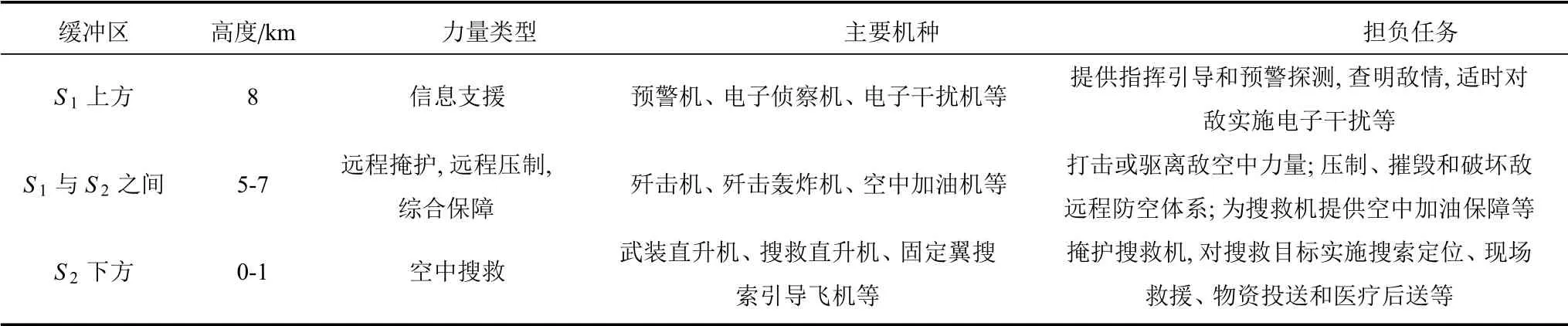
表1 联合空中搜救空间高度层配置情况Table 1 Joint air search and rescue space altitude configuratio
2.2 高度协调线在空间管控方面应用
建立联合空中搜救空间高度协调线后,便可根据高度协调线相关使用规定,对联合空中搜救空间管控方法作进一步梳理总结.
2.2.1 划设高度范围
通过运用高度协调线,结合各型搜救力量飞行高度、作用范围和任务类型,在搜救空间内设置若干缓冲区,可将搜救空间划分为不同高度层.如此,既可有效避免各型力量相互干扰,造成不必要损失,也可以高度为基准,促使各级指挥员及其指挥机关配置搜救力量过程中思路更加清晰.同时,便于各型搜救力量参考高度设置,进一步理清自身作用范围,做到协调有序、互相配合,共同完成搜救任务.
2.2.2 优化空间配置
通过建立高度协调线,将不同搜救力量由低至高,根据其飞行参数和运用特点依次部署,可极大优化搜救空间配置.结合联合空中搜救需要,巧妙设计缓冲区位置和高度,确保围绕同一搜救目标,各型搜救力量能够按照高度协调线相关规定,于有限空间达成优化配置.通过调整高度分布,促使其共同利用现有空间范围,充分发挥自身作用,同时相互支援配合,形成最佳力量效能,实现对搜救空间的完全利用,使搜救空间配置达到最优化.
2.2.3 规范用空活动
按照相关要求,高度协调线一经制定,各高度层空中搜救力量必须严格遵守高度范围,禁止随意突破.联合空中搜救行动中,各高度层空中搜救力量需严格遵守高度协调线管控规定,在各自高度范围内执行搜救任务,以自身高度范围为基准,规范并约束搜救行动.遇有特殊情况,需超出高度范围时,应依照审批程序,逐级报请上级批准.高度协调线建立和运用,对于规范搜救力量用空活动,确保各型力量行动有序,具有极为重要的现实意义.
3 基于“空中搜救锥”构建锥体空间模型
文献[4]中“空中搜救锥”作为一种作战概念,旨在强调“联合空中搜救为体系支撑下的点行动,锥内各层行动均应以搜救目标为核心,进而形成锥形物理空间”.实际上,此种锥形空间仅适合于描述联合空中搜救悬停吊救阶段,并非适用于行动全过程.对此,决定基于“空中搜救锥” 概念,通过区分不同行动、力量模式,建立联合空中搜救锥体空间模型.
3.1 不同行动模式锥体空间模型
不同行动模式锥体空间模型,即根据联合空中搜救不同行动阶段特点,分别为其建立锥体空间模型.现结合具体实际,将联合空中搜救行动区分为搜索模式、作战模式和救援模式.
3.1.1 搜索模式
搜索模式,主要用于搜索发现阶段.此时,为更好地达成“空中指挥”功效,认为预警机、电子侦察机以搜救目标位置点为基准,部署在搜救区域上空,且位于最高层,用以空中指挥和侦察探测敌情[5];制空战斗机保持于较高位置,实施警戒巡逻;武装直升机伴随搜救直升机飞行,与搜救直升机配置于同等高度[6].由此,建立搜索模式锥体空间模型,如图4所示.设定搜救直升机以扇形搜索方式,于搜救区域上空实施搜索发现,搜索半径为R1,O为搜救起始点,A为搜救目标最后已知位置点,A′为t时刻预定搜救目标位置点,预定搜救区域为以A′为圆心、R1为半径的圆形区域S,锥体空间内采用高度协调线规则,共设置2 个缓冲区,分别为S1、S2,各高度层力量分布情况如图4所示.搜救空间V可表示为由C(E2,S2,HC,t)为圆心、R1为半径的底部区域S′,B(E2,S2,HB,t)为圆心、R2为半径的顶部区域S′′,以及高度HBC构成的锥体空间.其中,R2是指预警机或电子侦察机,为满足搜索发现、空中指挥和侦察探测敌情需要,以搜救目标位置点A′为圆心,应合理选取的飞行半径.由此,搜救空间容量可表示为:
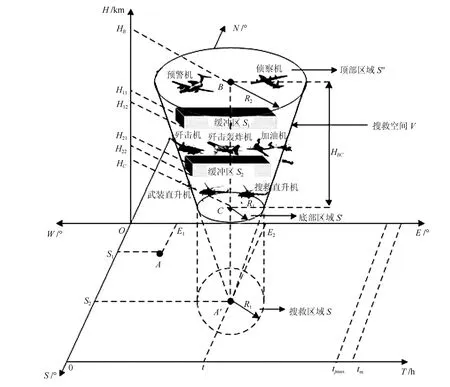
图4 搜索模式锥体空间模型Fig.4 Cone space model in search mode

式中:HB为预警机或电子侦察机应合理选取的飞行高度;HC为搜救直升机飞行高度.
3.1.2 作战模式
作战模式,主要在搜救行动受到敌方阻射拦截时使用.此时,预警机、电子侦察机以搜救目标位置点为基准,部署在搜救区域上空,且位于最高层,用以空中指挥和侦察探测敌情;制空战斗机通常以高制低,从高空消灭或阻击敌空中力量,同时压制敌防空火力[7];武装直升机则需稍低于搜救直升机配置,以掩护搜救直升机安全,先期肃清敌地对空火力.以搜索模式为基础,搜救原始条件不变,建立作战模式锥体空间模型,如图5所示.设定搜索发现阶段突遭敌航空火力袭击,于是启动作战模式[8].为保证搜救直升机安全,同时确保武装直升机顺利实施对地打击,决定于搜救直升机、武装直升机之间设置缓冲区S3,由此,搜救空间内共设置3 个缓冲区,分别为S1、S2、S3.搜救空间V可表示为由C(E2,S2,HC,t)为圆心、R3为半径的武装直升机作用区域S′,B(E2,S2,HB,t)为圆心、R2为半径的顶部区域S′′,以及高度HBC构成的锥体空间.其中,R2是指预警机或电子侦察机,为满足空中指挥和侦察探测敌情需要,以搜救目标位置点A′为圆心,应合理选取的飞行半径;R3是指武装直升机为掩护搜救直升机安全,以搜救目标位置点A′为圆心,应合理选取的飞行半径.由此,搜救空间容量可表示为:

图5 作战模式锥体空间模型Fig.5 Cone space model in combat mode

式中:HB为预警机或电子侦察机应合理选取的飞行高度;HC为武装直升机应合理选取的飞行高度.
3.1.3 救援模式
救援模式,主要用于悬停吊救阶段.此时,预警机、电子侦察机以搜救目标位置点为基准,部署于搜救区域上空,且位于最高层,用以空中指挥和侦察探测敌情;歼击机、歼击轰炸机等压制、掩护力量保持较高高度实施警戒巡逻;武装直升机稍高于搜救直升机[9],负责掩护搜救直升机行动;搜救直升机位于较低高度对搜救目标实施悬停吊救.保持原始条件不变,建立救援模式锥体空间模型,如图6所示.搜救空间内共设置2 个缓冲区,分别为S1、S2.搜救空间V可看作以搜救目标位置A′(E2,S2,0,t)为圆心、R2为半径的底部区域S′,以及高度HB构成的锥体空间.其中,R2是指预警机或电子侦察机,为满足空中指挥和侦察探测敌情需要,以搜救目标位置点A′为圆心,应合理选取的飞行半径.由此,搜救空间容量可表示为:
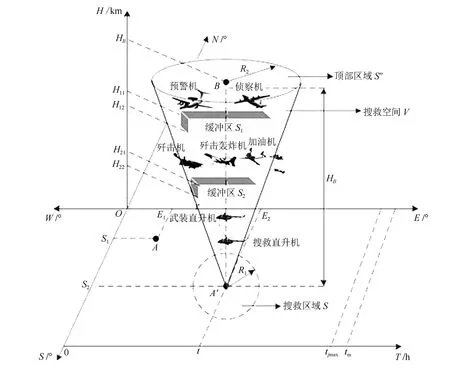
图6 救援模式锥体空间模型Fig.6 Cone space model in rescue mode

式中:HB为预警机或电子侦察机应合理选取的飞行高度.
3.2 不同力量模式锥体空间模型
不同力量模式锥体空间模型,即按照有无夺取制空权,对联合空中搜救分别进行力量配置,同时建立不同力量配置模式下的锥体空间模型.
3.2.1 未完全夺取制空权
未完全夺取制空权情况下,必须重点考虑敌情威胁,搜救过程中,仍需预警机、电子侦察机位于高空实施大范围侦察探测,歼击机、歼击轰炸机在大范围内进行警戒巡逻[10],由此形成上宽下窄的反向锥体空间.此时,采取一般力量配置模式,即“2+X+Y+1”模式,2 架搜救直升机,X架武装直升机,Y架歼击机,1 架预警机.其中,武装直升机、歼击机数量视战场情况而定.如图7所示.设定此时处于搜索模式,原始条件保持不变,共设置S1、S2两个缓冲区.
由图7 可知,搜救空间容量为:
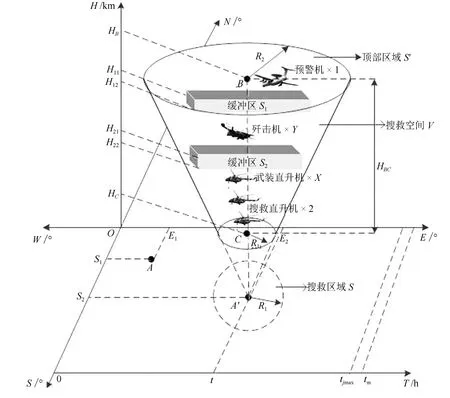
图7 “2+X+Y +1”力量模式锥体空间模型Fig.7 Cone space model in“2+X+Y +1”power mode

式中:R2为预警机应合理选取的飞行半径;HB为预警机应合理选取的飞行高度;R1为搜寻半径;HC为底端搜救直升机飞行高度.
3.2.2 已夺取制空权
已夺取制空权情况下,虽然搜救区域不变,但由于敌情威胁较小,预警机可于较小范围内实施侦察探测,由此形成上窄下宽的正向锥体空间.此时,无需派遣歼击机、歼击轰炸机等压制、掩护力量,可采取简化的力量配置模式[11],即“2+1”模式,2 架搜救直升机和1 架预警机.其中,一架搜救直升机负责悬停吊救,另一架负责武装警戒,如图8所示.设定此时处于搜索模式,原始条件保持不变,仅设置一个缓冲区S1.
由图8 可知,搜救空间容量为:

图8 “2+1”力量模式锥体空间模型Fig.8 Cone space model in“2+1”power mode

式中:R1为搜寻半径;R2为预警机应合理选取的飞行半径.
3.3 锥体空间模型在空间管控方面应用
以锥体空间模型为基准,可继续探索锥体空间管控措施和动态管控方法,从而使锥体空间模型在联合空中搜救空间管控中得到具体应用.
3.3.1 锥体空间管控措施
针对联合空中搜救锥体空间,特提出以下管控措施,以便进一步强化管控效果,确保联合空中搜救空间管控活动有力实施.
1)严格空间范围.各型力量必须严格遵守空间管控规定,始终保持在各自空间范围内实施参与搜救行动[12],若遇紧急情况,需临时突破空间范围时,应及时报请相应指挥机构审核批准.
2)履行生效时段.联合空中搜救锥体空间应根据各阶段任务不同,规定不同模式下生效时段,各型力量需紧密配合,力争在生效时段范围内,高效完成搜救任务[13].
3)禁止任意出入.搜救过程中,锥体空间呈封闭状态,以便形成整体力量优势,并确保搜救行动安全.如需增加或减少搜救力量,必须报请相应指挥机构批准,否则,特定生效时段内,任何力量未经允许不得随意出入[14].
3.3.2 锥体空间动态管控
联合空中搜救面临情况复杂多样,空间管控过程中,应时刻关注目标位置、自然环境和战场环境变化[15],以便及时对锥体空间进行动态调整,确保空间管控始终满足战时联合空中搜救需要.
目标位置.搜救目标位置不同,必然引起搜救区域改变,进而导致搜救方式、力量配置,以及空间态势依次作出相应调整[16].应当说,整个联合空中搜救过程中,锥体空间应始终以搜救目标位置为中心,时刻处于动态管控过程中.
自然环境.伴随自然环境变化,锥体空间将呈现出不同态势.海洋环境下,受海面风、潮流作用影响,表现为平底动态锥体空间;平原环境下,气象条件一般较为稳定,表现为平底静态锥体空间;高原或山地环境下,地形起伏较大,且受大风、强气流扰动影响,表现为斜底动态锥体空间.
战场环境.战场环境不同,锥体空间形态也将有所不同.搜救目标位于敌方控制区,且敌情威胁较大时,需要歼击机、歼击轰炸机位于高层,实施大范围警戒巡逻,表现为上宽下窄的反向锥体空间;而当搜救目标位于我方控制区,且敌情威胁较小时,无需过多压制、掩护力量参与,表现为上窄下宽的正向锥体空间.
4 结论
本文以“空间盒”全球坐标参考系统为基准,建立联合空中搜救空间坐标体系;采用“高度协调线”指挥控制措施,为联合空中搜救划分空间高度层;基于“空中搜救锥”作战概念,结合联合空中搜救实际,分别构建不同行动、力量模式下锥体空间模型,并逐一探讨了空间坐标体系、高度协调线、锥体空间模型在空间管控方面的具体应用.通过研究分析,认为上述方法对于联合空中搜救空间管控具备了一定实效性.