基于改进的RBF神经网络车辆动态称重研究
2021-10-15魏赫,陈新
魏 赫,陈 新
(南京理工大学, 南京 210094)
1 引言
目前,应用于高速公路上的动态称重检测设备有很多类型,使用最为普遍的是压电薄膜传感器,对高速通行车辆称重的误差率为±5%,仍有可提升的空间。针对提升动态称重系统精度这一研究目标,国内外学者在多个方面着手研究。袁明新[1]提出可以利用RBF神经网络处理动态称重数据,相比于传统的BP神经网络,RBF神经网络的全局搜索能力更强,优化效果更好。赵娜[2]对神经网络在动态称重数据的应用进行研究,将前后轴重差值作为神经网络的输入量,对真实车辆重量进行了预测,数据表明,增加神经网络的参量可以有效地提升神经网络的预测精度。陈超波[3]对RBF神经网络在动态称重数据处理的可行性进行了探究,利用小车进行通行实验,验证了RBF神经网络可以应用于对动态称重数据的处理。宗周红[4]对汽车通过动态称重设备的物理荷载模型进行研究,分析了误差的物理来源,证明速度、温度、车型、车重设备设置的角度都是影响压电薄膜传感器测量值的关键因素。Afiatdoust[5]提出将遗传算法与RBF神经网络结合,数值分析结果表明,经过结合后的优化效果优于传统的RBF神经网络算法。现阶段存在的问题是:传统的BP与RBF神经网络的收敛速度较慢,算法仅支持低速车辆的数据优化,对高速运行车辆的数据优化效果不够理想。
本文中提出了利用粒子群优化RBF神经网络的算法处理高速车辆运行数据。对比了BP、RBF、改进的RBF算法对动态称重数据的优化效果,并对不同速度的数据优化效果进行了分析,发现改进的RBF算法对高速运行的车辆数据有良好的优化效果,在高速公路的车辆称重检测中有一定的推广价值。
2 动态称重系统
2.1 动态称重系统的结构
汽车动态称重系统包含了称重平台模块、车牌照识别模块、车型判断模块、数据采集模块、芯片处理模块、通信模块、显示模块。其中称重平台设置、称重数据采集、称重数据优化是动态称重系统中最重要的3个环节[6],如图1所示。
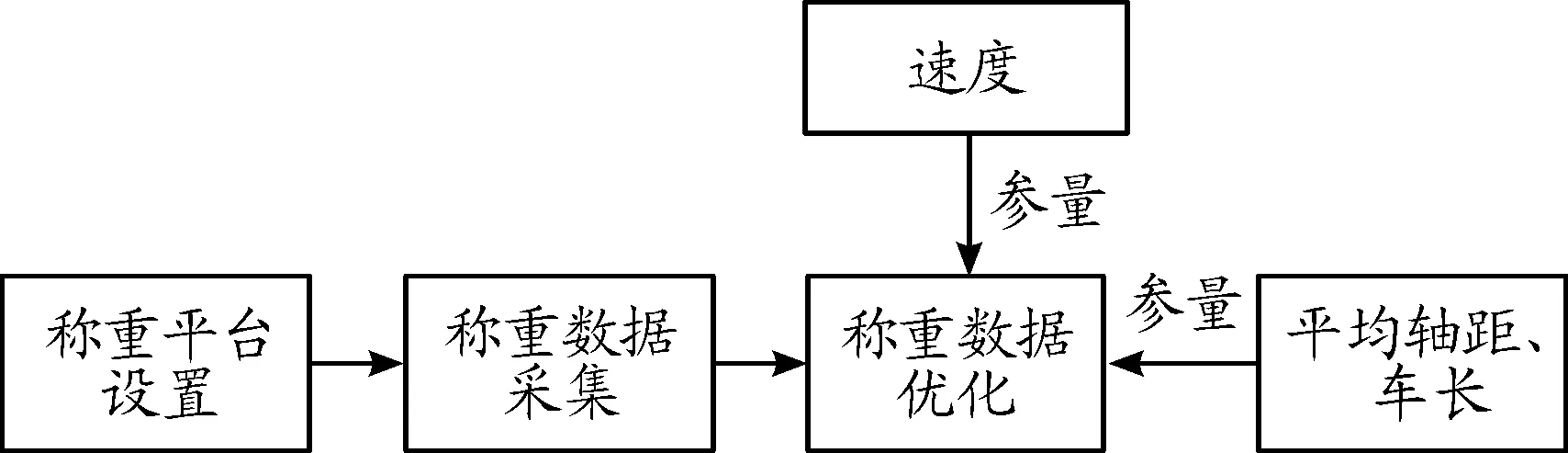
图1 动态称重系统环节框图Fig.1 Dynamic weighing system link diagram
称重传感器平整铺设于公路路面,汽车经过时传感器将轴重信号转换为电压信号经过滤波、放大、数模转换发送至处理器。主机接收到该信号与车速信号,对其进行优化处理后得到车辆车重。
2.2 动态称重系统误差因素分析
汽车动态称重误差因素主要来源于以上3个环节,经过对这3个环节的分析,我们将误差因素归纳于以下几条:
1) 称重平台在设置时不够平整,或者后期运营时路面产生了塌陷,导致器材产生了一定的倾斜度,倾斜度导致了测量的偏差。
2) 由于车辆行驶的车速过快,称重数据在采集时导致信号部分失真和采样丢失,产生了测量误差。
3) 车辆在运行的时候并不是完全径直通过动态称重设备的,往往会夹杂着y轴的水平晃动和z轴的车辆振动,这些噪音干扰了数据的采集[7]。
这些误差都是来源于物理因素,而对这些误差来源进行物理分析是十分复杂的。因此,本文提出使用神经网络学习的方式对动态称重系统的测量精度进行优化,其主要方法是利用多种类型的数据进行数据融合,找出数据与误差之间的潜在关联性,实现对目标的预测,这种方式可以避免复杂的物理建模。
3 改进的RBF神经网络的构建
3.1 传统RBF神经网络的结构
RBF神经网络是BP神经网络的变种,在1985年由Powell提出[8]。RBF神经网络是一种3层前馈型网络,由输入层、隐层和输出层组成,与传统BP神经网络相比,RBF神经网络的结构更加简单,隐层只有一层,且输入层与隐层之间的权值固定为1,隐层和输出层之间的权值随着训练逐步调整。RBF神经网络如图2所示。

图2 传统RBF神经网络框图Fig.2 Block diagram of traditional RBF neural network
设输入矢量为x=[x1,x2,…,xm],隐层的节点个数为n,RBF网络的输出可以表示为:
(1)
式(1)中:wi(i=1,2,…,n)代表第i个隐层节点与输出层之间的权值;φi(‖x-ci‖)是隐层激活函数。一般使用高斯函数作为隐层激活函数,高斯函数可以表示为:
(2)
3.2 PSO算法对RBF神经网络的改进
RBF神经网络在处理大量样本时需要的隐层神经元数较多,导致RBF神经网络的复杂度增加,因此,采用PSO算法对RBF神经网络进行优化。在保持RBF高效收敛精度的同时,也增强了全局搜索能力[13]。
PSO是一种进化的计算技术,在1995年由Eberhart博士和Kennedy博士提出,其思想启发源于鸟群捕食行为,在该算法中,每个优化问题的可能解是搜索空间中的一只鸟,即“粒子”。粒子拥有运动速度和所处位置2个属性,粒子通过迭代更新自己的速度和位置,每次迭代过后都会搜寻多维空间,自我总结出适应度值,粒子根据适应度值的大小判断出当前解集的优越程度,迭代了一定次数之后达到目标要求,最后得到每个粒子的最优解以及全局的最优解。
设目标搜索空间的维度是N,粒子群中粒子的数目为D,粒子群优化算法内容如下。
第i个粒子的所处位置为:
Xi=(xi,1,xi,2,…,xi,N),i=1,2,…,D
(3)
第i个粒子的运动速度为:
Vi=(vi,1,vi,2,…,vi,N),i=1,2,…,D
(4)
第i个粒子目前搜索到的适应度最高的个体最优解:
pbest=(pi,1,pi,2,…,pi,N),i=1,2,…,D
(5)
粒子群落迄今为止搜索的全局最优解:
gbest=(g1,g2,…,gN)
(6)
粒子在迭代过程中,逐步更新自己的运动速度和所处位置:

(7)
式(7)中:c为学习因子;r1、r2为[0,1]区间的随机数;t代表当前迭代次数;ω为惯性权重因子。
学习因子分为2种:一种为个体学习因子,记作c1,另一种为社会学习因子,记作c2。它们共同决定了粒子的个体和群体适应度对粒子运动轨迹的影响,代表粒子间的信息交流密切程度,为了保障同步率,一般把c1、c2设置为相同数值,即c1=c2=2。
3.3 PSO算法中权值的优化
权值ω取值是否合理,会严重影响算法的优化能力,为了保障粒子能够达到较好的全局寻优能力和局部搜索能力,需要对ω的取值进行弹性优化,ω的取值一般在[0.08,0.92]区间,给出优化式为[14]:
ω=0.08+0.84logT(T-t-2)
(8)
式(8)中:T为PSO算法的最大迭代次数;t为当前迭代次数。
随着迭代次数的增加,ω非线性的递减。在迭代的初期,粒子采用较大的惯性权重因子进行搜索,使算法具有更高的全局寻优能力。在迭代的后期,粒子采用较小的惯性权重因子,有利于粒子进行局部寻优[15-16]。
改进的RBF神经网络算法的具体流程如图3所示[17-19]。
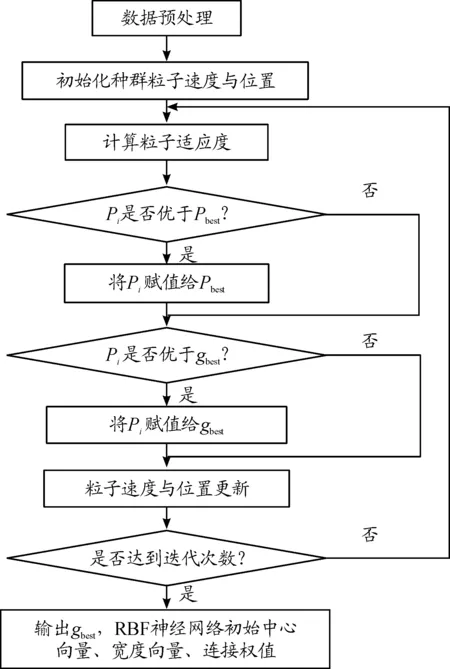
图3 改进的RBF神经网络算法流程框图Fig.3 Block diagram of the improved RBF neural network
4 RBF神经网络数据分析应用
4.1 动态称重数据的处理
本次研究选取了江苏省南通市通州区滨江新区东沙大桥动态称重试验期的车辆数据,研究对象为静态重量在12 000~21 000 kg的3轴和4轴中型货车。车辆从压电薄膜传感器上驶过,为传感器提供压电信号,动态称重设备读取压电信号,得到称量数据。车牌照识别模块对行驶的车辆进行拍照,记录其牌照数据,将其与前方收费站停车称量的静态称重数据进行关联。最终得到数据如表1所示。
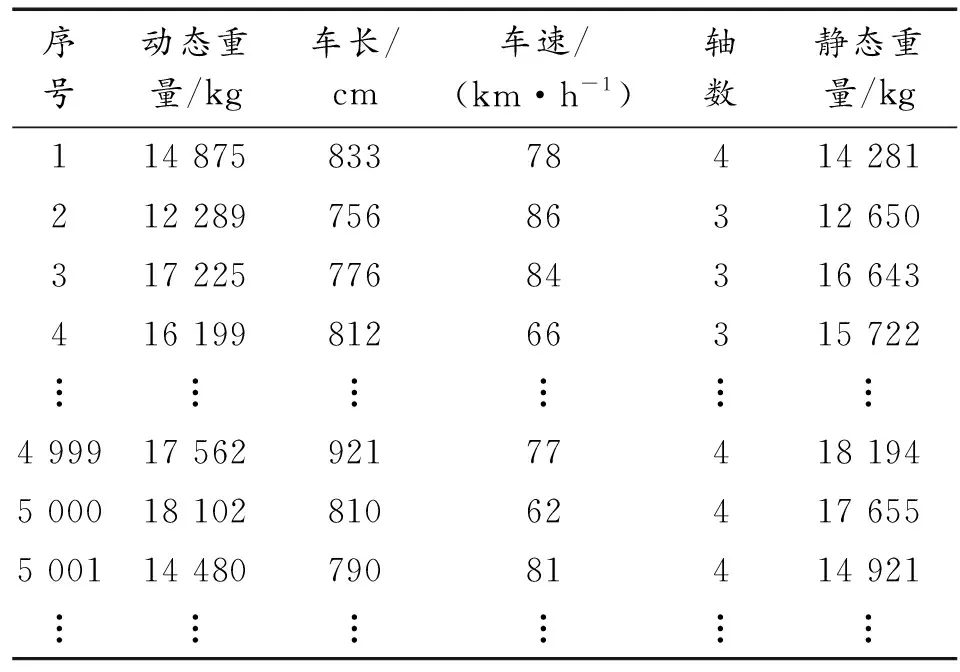
表1 东沙大桥过车记录Table 1 Dongsha bridge vehicle passing record

在Matlab环境中使用神经网络工具箱建立BP、RBF、改进的RBF等3种神经网络模型,使用newrbe函数训练神经网络,由于神经网络算法需要大量数据样本进行训练,因此抽取表1中的前5 000条过车记录,足量的数据用来保障神经网络的稳定性,保证预测结果更加接近理想的数值。将表1的5 000条过车记录中前20%的数据分割为测试集,后80%作为训练集,训练改进神经网络,得出的部分测试结果如表2所示。
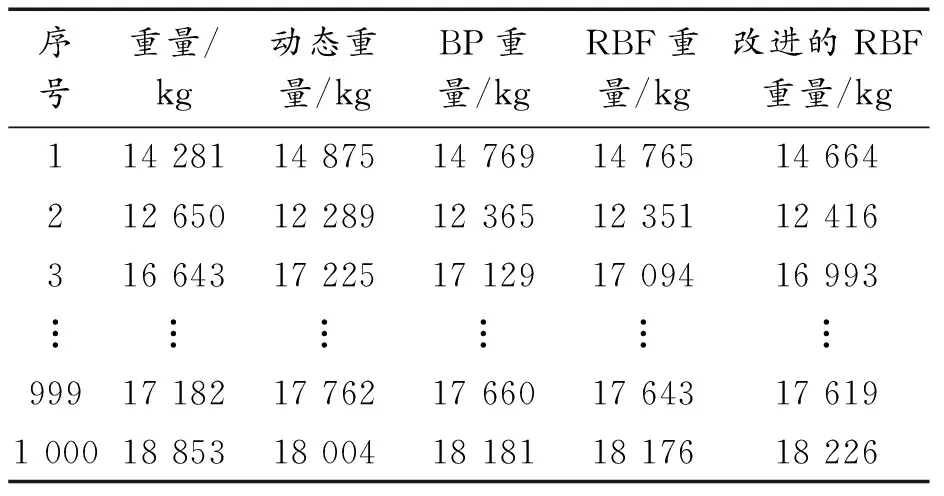
表2 3种神经网络的测试结果
为了更加清晰地表现BP、RBF、改进的RBF等3种算法的训练效果,选择相对误差作为评估量,得到4种方法相对误差的部分数据如表3所示,相对误差测试结果如图4所示。
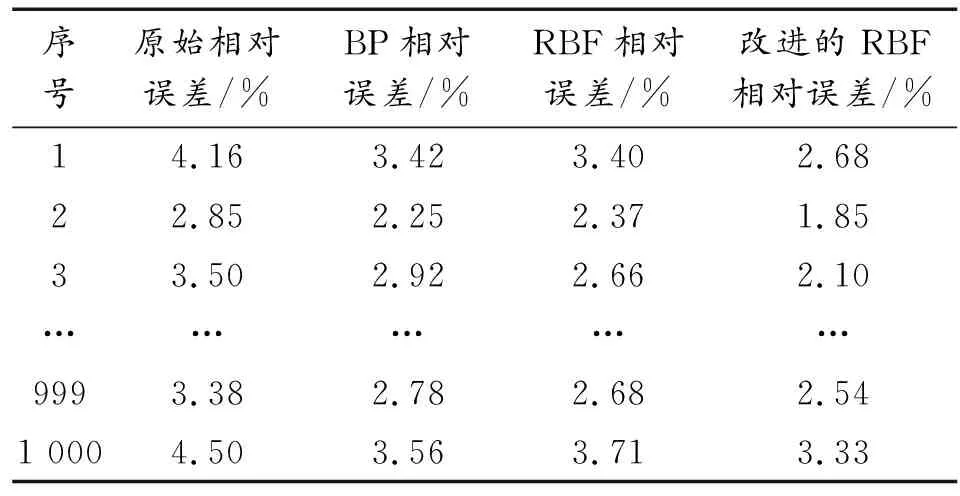
表3 相对误差值
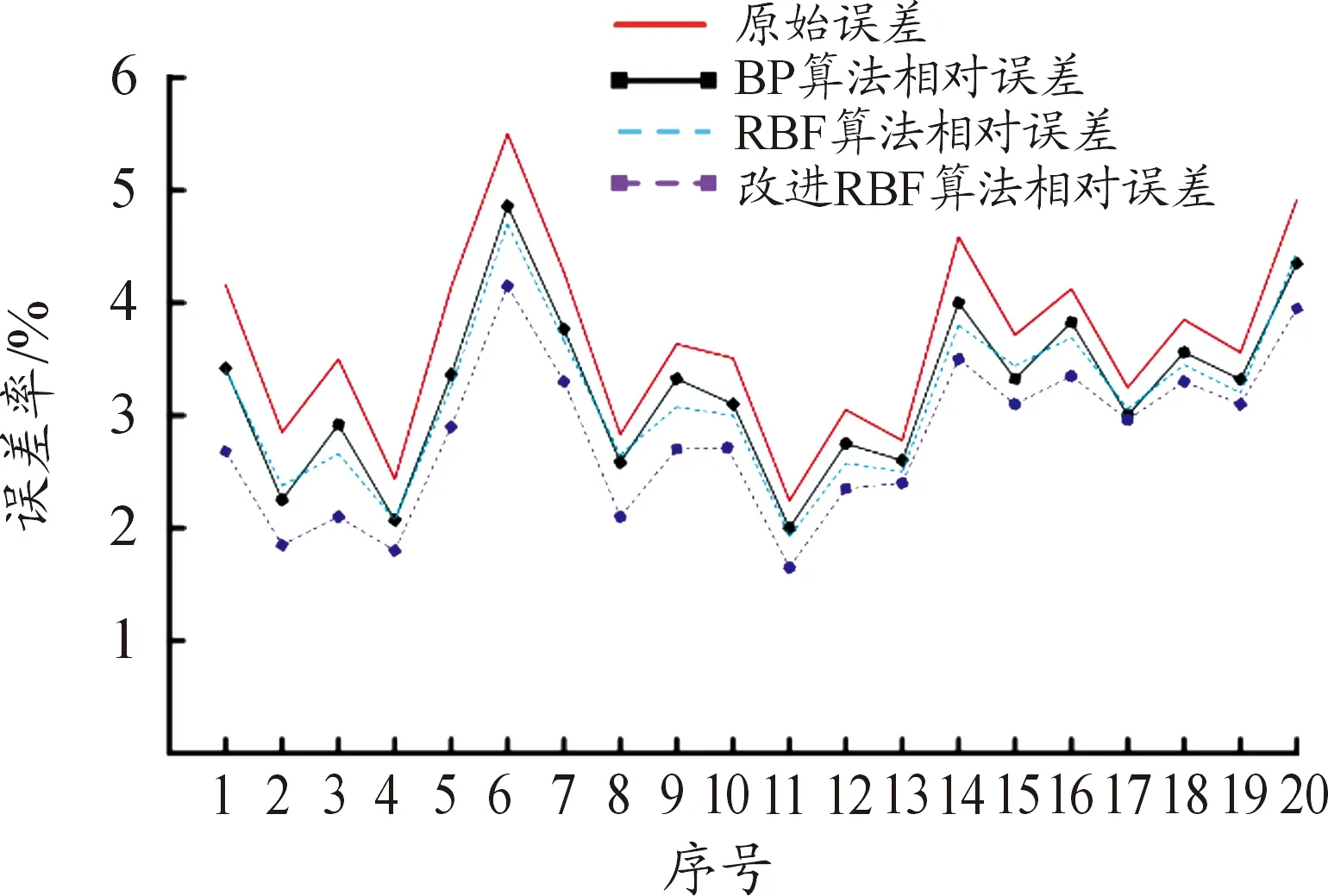
图4 相对误差测试结果曲线Fig.4 Relative error test results
从表3、图4可知,BP模型与RBF模型都能对数据起到一定的优化效果,优化效果基本一致。经过改进的RBF模型处理后的数据误差率明显降低,效果优于BP模型与RBF模型,能更加准确地判断车辆的真实重量。
4.2 速度相关性探究
为探究改进的RBF算法对高速车辆的预测效果,将1 000条测试结果按照速度分组。本次测试车辆数据通过的车速多为50~90 km/h,因此将车速数据分为8组,每组区间大小为5 km/h,每组区间随机抽取30组数据,将误差率进行平均处理,测试结果如表4、图5所示。
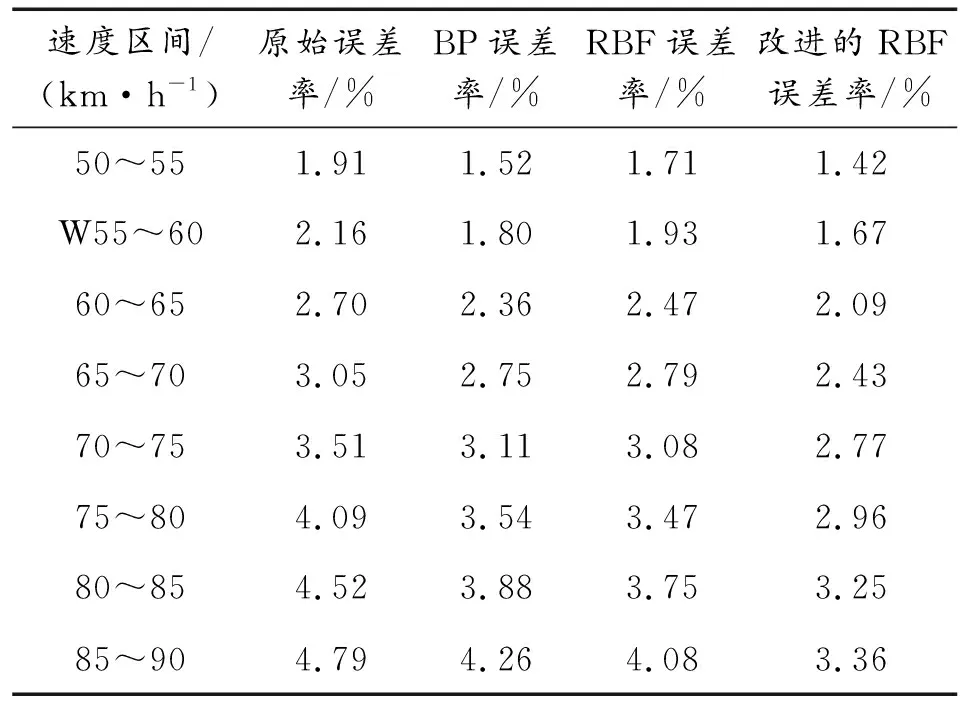
表4 速度-误差率测试结果
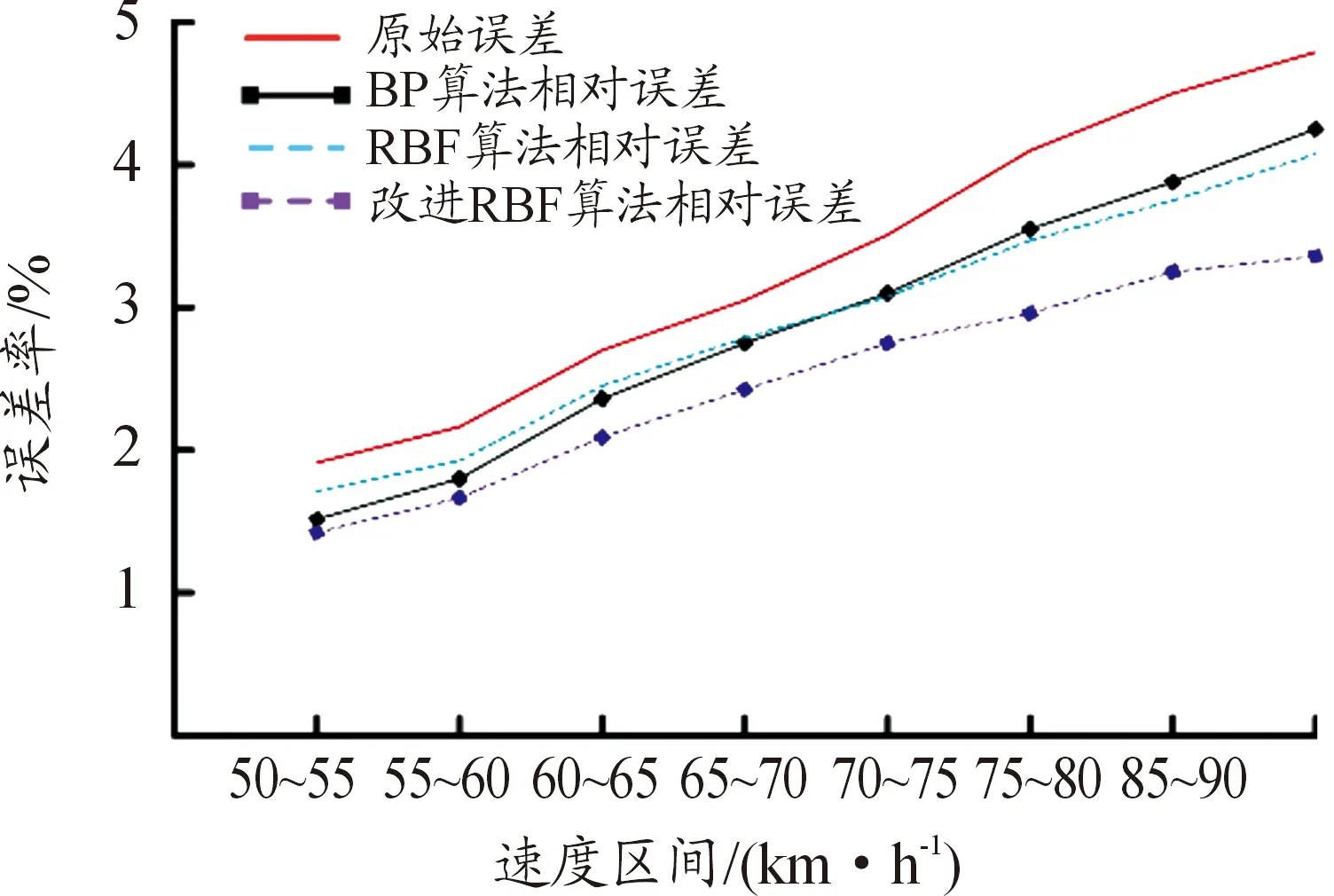
图5 速度-误差率测试结果曲线Fig.5 Speed-error rate test results
由图5、表4可知,车辆动态称重的误差率随着速度的提升而增加,BP算法和RBF算法对车辆动态称重的优化效果基本相同,改进RBF算法优化效果都要好于RBF和BP算法。
定义误差优化效率为:
式(9)中:ΔEO为原始误差百分比;ΔEN为新算法误差百分比。
根据式(9),车速在50~55 km/h时BP算法的优化效率为20.4%,RBF算法的优化效率为10.5%,改进的RBF算法的优化效率为25.6%;在85~90 km/h的速度区间时,BP算法的优化效率为11.1%,RBF算法的优化效率为14.8%,改进的RBF算法的优化效率为29.9%。BP算法在车辆高速运行时的优化效果明显下降,RBF算法与改进的RBF算法在车辆高速运行时的优化效果略有提升,改进的RBF算法更加适合应用在高速车辆动态称重中。
5 结论
1) 改进的RBF神经网络算法相比传统的RBF算法和BP算法,可以有效地提升数据优化能力,能够更加精准地预测车辆的真实车重。
2) 改进的RBF神经网络算法对高速通行的车辆优化效果更好,检测范围更广,泛用性更强,在实际的公路动态称重数据处理中有重要应用意义。
3) 本次研究只针对了3轴和4轴的中型货车车辆进行数据处理与神经网络建模分析,取得了较好的效果,仍存在研究范围不够全面的问题,建立更加优化的模型与算法,求解多种类型车辆的动态称重数据是未来研究的重点。
