无人行车PLC系统研究
2021-10-14季萍
季萍


[中图分类号] TP273
[文献标志码]A
[文章编号]2095-6487 (2021) 02-0089-03
Research on PLC System of Unmanned Crane
Ji Ping
[ Abstract]
rms paper mainly introduces the function description, hardware structure, network and communication of the PLC system ofunmanned crane, and provides some ideas for the selection of control components, so as to provide users with reference in the actual application processThrough the upgrading and transformation of the PLC system and other research, the key technology ofintelligent manufacturing is broken through and theautomatic operation of unmanned crane is implemented, which not only reduces the labor intensity of workers, effectwely prolongs the life of equipment,but also improves the production efficiency and reduces the risk of safe operation ofpersonnel.
[ Keywords] unmanned crane; PLC system; network communication;system structure
1 慨述
智能无人行车在生产制造领域发挥的作用越来越重要,由于无人行车技术彻底颠覆了传统的行车控制理念和库区管理理念,通过自动化系统生成调度指令,并根据基础设备的参数自动控制行车运行,不仅可以降低劳动力成本、跟踪库存信息,还可以优化存储方案、减少生产损失、提高生产力,因此在工J‘成品库区的应用范围越来越广泛。越来越多的企业对行车进行无人化改造,更换不满足无人化需求的PLC系统、传动系统、电机以及传感器等。以马钢高线成品智能库区无人行车系统为例,对PLC系统进行研究。
2 行车PLC系统
2.1 系统功能描述
行车一级控制系统是能根据智能库管系统下发的工单自动执行相应作业任务的系统,具有作业信息处理、运行模式改变、通信管理、行车位置及速度控制、防摇摆控制以及自我诊断危险状况执行自动停车、行车故障分析等功能,并且能够进行自动避障及路径优化。
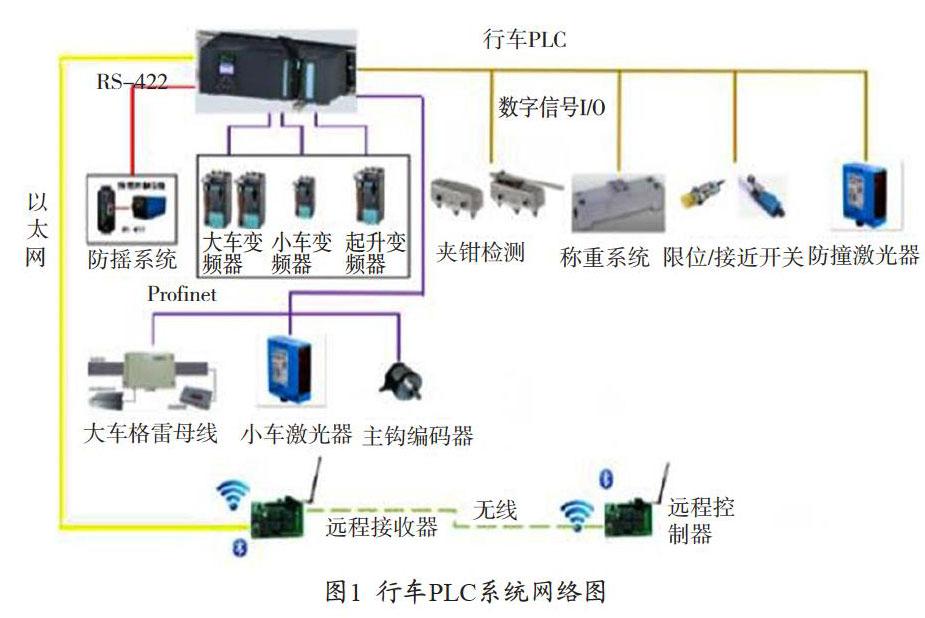
在行车电气室内设置一台甲板工控机,用于基础自动化系统的编成、调试、诊断和维护行车系统状态,系统网络如图1所示。
系统主要功能如下。
(1)作业信息处理:作业信息处理是无人行车系统的最基本功能,能够接收来自智能库管系统的工单信息,进行作业后自行反馈给智能库管系统工单处理结果信息和当前行车状态信息。
(2)通信管理。和各种装置(包括传动变频器、随摇、测距传感器、称重、编码器等)之间的接口通信功能。
(3)吊具防摆控制功能。通过摆角检测仪实时检测出人车及小车移动时的摆舶,行车PLC根据摆角人小及摆动方向计算出补偿加速度和速度,然后叠加到人车及小车的控制加速度和速度上,以此控制行车吊具的摆动。
(4)吊具状态判断功能。该功能主要根据物料高度、吊具高度检测以及称重数据,配合吊具传感器打开/关闭状态,综合判断吊具是否取放物料。
(5)行车XYZ轴定位控制功能。接收物料库管理系统发送的作业指令,根据XYZ轴的位置传感器,控制行车驱动部分,实现精准定位。
(6)行车XYZ轴联动控制功能。控制纵向/横向/高度方向联动,优化行车作业效率。
(7)行车防撞控制功能。通过实时检测行车间距离,调整行车运行速度,实现行车防撞控制。
(8)速度控制与计算停止距离功能。该功能根据成品库管理系统发送的作业指示,计算行车的移动方向(纵向、横向、起升)、移动速度与移动距离决定停止位置。
(9)动态三轴联动功能。该功能通过整合库区所有行车扫描系统数据信息,根据整个库区物料的高度,建立行车运行時的动态路径规划,实现行车三轴联动功能(如Z字型、爬坡型等联动运行),并防止其他设备、线卷之间的碰撞。
(10)周边系统与传感器通信、HMI及日志功能。该功能主要收集的各种传感器信息与作业信息发送到库区管理系统并保存,具备查询和数据导出的功能。
(11)自我诊断功能。判断行车是否有故障并发送到库区管理系统,根据行车故障状态修改库区管理系统作业。
2.2 行车PLC系统硬件组成
整车采用西门子公司最新的S7-1500系列PLC进行控制,S7-1500系列所有的PLC已经将工业以太网PROFINET作为标准的通信接口集成在了CPU上,因此以CPU为中心,与上位:监控计算机组成ETHERNET网,与分布式I/O模块和交流变频调速器构成PROFINET总线网络系统,实现整个电控系统的网络化工作模式。PLC安装于电气室电控柜内,分布式I/O模块安装在行车驾驶室,其参数可配置如下。
(1)电源模板6EP1332,为S7-1500机架提供电源。
(2) CPU模板,选用CPU1516模板。
(3) CPU1516通信模板,用于远程站、传动、传感器等的通信。
(4) CP541通信模板,用于吊具角度检测传感器通信。
(5)以太网通信处理器CP543-1,用于S7-1500主站到库管系统的连接。
(6) PLC UR2机架。
(7)接口模板IM15 5-1,用于将ET200 MP模块化I/O站连接到PROFINET网络。
(8)模拟量输入模板,用于模拟量输入,用于连接模拟量信号采集。
(9)数字量输入模板,用于连接称重、行车遥控接收端,操作开关和接近开关等开关量传感器。
(10)數字量输出模板,用于继电器、接触器等负载,输出接口与负载之间设置无源接点隔离。
行车PLC控制系统配置如表1所示。
2.3 协调控制PLC系统
设置一套地而协调PLC也采用西门子S7-1500,协调控制PLC系统主要负责整个库区的地面部分的数据采集、控制、联锁90 1 2021.2今日自动化以及安全管控。主要负责的内容和功能如下。
(1)下线台架精确定位及位置锁定。
(2)下线位置线卷长度测量。
(3)安全门禁管控。无人行车作业区域里不允许任何人随意进入,增设安全护栏,出入口设置机械锁定装置,同时设置安全限位开关,行车进入未设置为危险区域等特定情况下不允许人员打开安全门进入。
(4)汽车出入库管控。对于库区内的车位,建设智能库区的过程中,汽车的安全管控涉及该区域的安全,增加检测传感器以及人机交互系统,并与库管系统通信共同。实现安全管控。系统配置如表2所示。
2.4 通信与网络
2.4.1 系统结构图
为实现行车控制与库管系统间数据的快速传递,需要在库区建立一个快速无线通信网络,采用无线传输方式将车上控制信号传输到固定无线接入点(无线AP)中,然后再通过光纤通信方式与中央控制服务器进行通信。
行车的无线控制网络采用点对点的接入方式,通信频段5 GHz。
手持终端也采用该无线控制网络通过漫游方式连接。
无线AP通过光电转换设备连接到集控室交换机,采用单模干兆光纤通信方式实现,减少在线路传输过程中外部因素对通信信号的干扰,交换机均采用千兆以太网交换机。
行车上的无线客户端安装在电气室内,直接连接到电气室内的交换机上,天线安装到行车外部,连接馈线在5m以内。系统结构如图2所示。
2.4.2 工业以太网
在库区中建立一个有线和无线相组合的工业以太网系统,通过网络将集控室与行车连接,采用无线AP实现各个系统之间的通信,每个无线AP配置一台光纤交换机,与以太网上的系统相连。
(1)协调控制PLC。
(2)库区管理系统WMS。
(3)编程器PC。
(4)可视化系统、HMI。
(5)其它。
2.4.3 现场总线
现场总线采用Profinet,它是基于工业以太网的一种全新的工业总线形式,并针对分布式智能自动化系统进行了优化,具有很好的史时性,可以直接与现场设备连接,采用SCALANCE交换机实现设备与PLC直接连接,避免了老式总线网络存在的问题。连接到Profinet网络上的设备如下。
(1) PLC可编程控制器。
(2) PLC的远程I/O系统ET200MP。
(3)传动系统。
(4)带有Profinet接口的发备。
2.4.4 串行通信接口
串行通信接口是采用了串行通信方式的扩展接口,其特点是通信线路简单可靠,主要用于摆角检测。
3 结束语
绿色发展和智慧制造是制造业未来发展的不二选择,智慧制造能较大程度地提高劳动效率、资产效率和管理效率,而基础自动化升级改造、生产系统集中是实现智慧制造的重要手段。本文所述的智能无人行车只足智慧制造中的一个缩影,但在国内外均已有成功案例,技术上电将日趋于成熟。
参考文献
[1]孟帅“无人化”行车智能控制技术的研究[J]自动化应用,2017 (7):47-48[2]陆远程无人全自动行车在钢铁企业的应用[J]机电信息,2020(17):45-46
