基于TransModeler仿真的浮动车比例取值方法研究
2021-10-14焦朋朋李义罡杨紫煜
安 玉,焦朋朋,李义罡,杨紫煜
(北京建筑大学 北京未来城市设计高精尖创新中心, 北京 100044)
实时准确地获取动态路网交通运行状态对实现高效交通信息服务系统十分重要。浮动车检测技术,是一种在20世纪90年代兴起的新型动态交通信息采集技术。它通过具有特殊定位系统和无线通信设备的交通载具,收集以时间为序列的车辆坐标、车辆速度等交通信息。之后将所得数据上传至中央处理站处理,建立信息控制数据库。不同服务对象可实时在线获取多样化的交通信息,利用整个路网的随机样本不断反映总体情况。相比于传统的环形线圈检测器和微波雷达检测器等固定源数据检测器,通过浮动车检测技术采集交通信息具有设备建设周期短、检测覆盖面大、数据实时性强和维护费用较低等优点,极大地补充了原有的交通信息采集方法。然而,浮动车检测技术也易受个体差异性的影响,表现为浮动车系统网络覆盖可靠性差等缺点。所以浮动车的比例需满足路网中交通信息采集精度和可靠性的要求。
浮动车检测道路中车辆的瞬时速度、经纬度坐标等信息,并按照一定的时间间隔及时传输到交通控制中心,通过对传输数据的分析,判断道路的运行状况并做出决策,改善道路运行状况。对浮动车系统而言,浮动车占全部车辆的比例对其覆盖性和数据可靠性有着显著地影响。通常情况下,浮动车比例过小,增加了个体随机性的影响,并影响所采集交通数据的可靠度;浮动车比例太大,增加了系统的安装和维护成本,也增加了信息处理负荷度。所以对浮动车比例的选取进行研究,可以达到在成本增加较少的前提下获取高精度交通参数的目的,为城市智能交通系统运营提供理论基础,具有较高的实际应用价值。
1 浮动车比例取值方法介绍
随着浮动车系统的不断成熟,近年来国内外学者对浮动车的研究重点逐渐从浮动车系统的数据输入和交通信息处理方法转移到研究浮动车比例和配置上,确定合适的浮动车比例可以协调数据采集成本与提升数据精度的矛盾,为浮动车信息采集系统提供可靠的数据支撑,浮动车数据从采集到统一整合,应用相关的计算模型和算法进行处理,推算得到路网的交通状态信息,为道路交通优化提供支撑[1],浮动车信息采集系统如图1所示。浮动车比例的取值方法可大致分为3种。
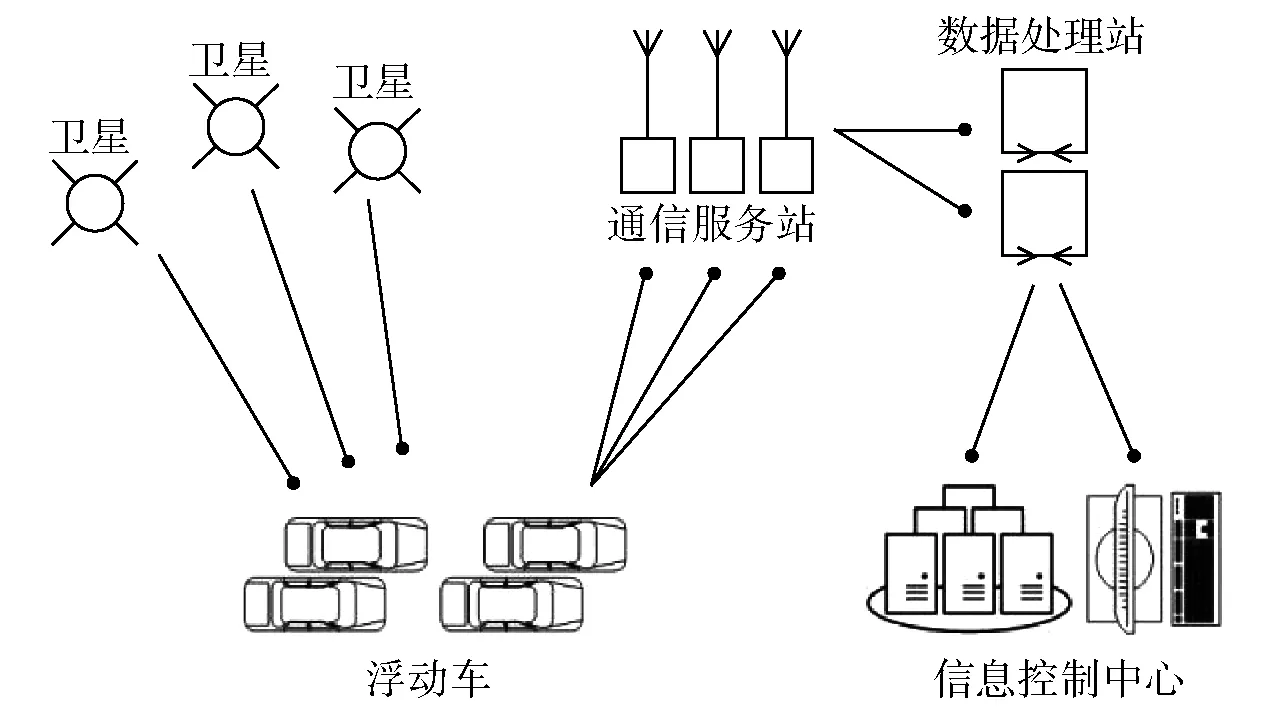
图1 浮动车信息采集系统Fig.1 Floating vehicle information collection system
1.1 数理分析法
数理分析法利用现实中浮动车比例的数据来验证路网中的浮动车比例能否满足要求的数据精度条件。因此当实际数据缺乏变化时,数据的层次较少,只能做少量验证,难以进一步求解出合适的浮动车比例。胡继华等[2]利用广州市的城市出租车数据,通过数理分析法在控制一定空车率的基础上给出了浮动车的合理规模。赵翔宇等[3]以5 min的交通需求和流量进行数据集计分析,取15 min为交通数据分析期,得出在6:00—24:00的内环内、外的出租浮动车覆盖比例随空间变化,且其覆盖路段的比例在60%左右,公交浮动车覆盖比例在晚高峰时段明显降低。
1.2 抽样比较法
通过抽样比较法计算浮动车比例的前提条件是当前规模浮动车所得到的路况真实可靠。抽样分析法包含路网覆盖率法、浮动车分步法、平均速度估计法等。辛飞飞等[4]通过深圳市的实证数据分析了浮动车比例和路网覆盖能力的关系,揭示了浮动车数据对路网覆盖率的时变特性。曾维等[5]对抽样后的数据与总体规模数据做了相似性分析,并以此确定浮动车比例。因此,在用抽样比较法计算浮动车比例之前,需要对浮动车数据的有效性进行检验。刘丽娜等[6]在确定浮动车最小样本数量的研究综述中,总结了不同浮动车比例确定方法的可行性与优缺点。在抽样比较法中,路网覆盖率的方法考虑了多种路段类型,但未考虑交通流估计精度的影响;基于浮动车分布的方法假设路网车辆分布均匀,与实际情况不符,需采集大量实际数据确定重复因子。
1.3 仿真实验法
利用仿真实验法方便精准地模拟不同道路结构以及在交通流参数时变的条件下车流运行状态。林思等[7]利用Vissim仿真十字交叉口发现:当浮动车比例在3%~5%时,平均行程时间准确度可达95%以上。唐克双等[8]提出了基于交通仿真软件Vissim的实时仿真实验分析法,通过30组上海市陆家嘴实验分析浮动车比例和数据采样频率,得到当浮动车比例为8%和采样频率为0.1 s时达到最优。
仿真实验法通过对交通系统进行仿真实验获取相关交通参数,并利用参数得出的交通流状态变化情况分析浮动车比例与交通参数精度之间的关系。与数理分析法和抽样比较法相比,仿真实验法不需实际交通系统的参与,仅通过仿真实验便可以产生全面丰富的实验数据,因而具有经济高效、计算便捷和可重复性高的优点。仿真实验法可对任何实际路网进行高精度复原模拟,所得结论更全面。与常用的Vissim仿真相比,TransModeler实现了微观仿真和宏观仿真的集成,可根据路网范围和仿真解析度选择合适的仿真模型,适用于大型路网下满足覆盖性要求的浮动车比例确定。综上所述,本文将建立基于TransModeler仿真的浮动车比例取值方法,确定满足实验路网要求的浮动车比例。
2 基于TransModeler仿真的浮动车比例取值方法
TransModeler是美国Caliper公司根据最新的交通理论研究成果、仿真手段和软件技术开发的多功能综合交通仿真软件。该软件一方面具有强大的仿真建模能力,可以模拟从高速公路到市中心区路网在内的各类道路交通网络,详细逼真地分析大范围多种出行方式的交通流;另一方面,还具有强大的仿真结果分析功能,输出统计指标丰富,包括交通量、平均速度、交叉口延误等。TransModeler仿真软件[9]强大的功能为通过仿真实验法计算路网浮动车比例提供了技术支撑,基于此软件可以构建一套浮动车比例的取值方法。
2.1 平均行程车速相对误差计算方法
为衡量不同浮动车比例的适用情况,需比较通过浮动车获得的交通参数与路网实际交通参数之间的误差,包括路段交通流量、车流速度和行程时间。平均行程车速相对误差能较好代表路网交通运行状态,所以本文选取其作为衡量依据,通过平均速度可以推算出交通流量、交通流密度等重要参量。在目前国内外常用的获取平均行程车速的方法中,空间平均法因其原理简单、计算方便而应用广泛。空间平均法计算平均行程车速的原理是:以浮动车系统输出数据的时间间隔作为固定时间间隔,在每个固定的时间间隔内输出一次浮动车的平均行程车速。考虑现实的浮动车系统情况,选取5 min作为固定时间间隔较为适宜[10]。本文以一条包含了3个路段的城市路网主干道为例,说明空间平均法计算平均行程车速具体步骤。
在如图2所示的一条城市路网主干道上,浮动车的3个相邻数据输出点A1、A2和A3分别在路段L1、L2和L3上,通过3个相邻数据输出点的时刻分别为tA1、tA2和tA3。假设浮动车在2个相邻的数据输出点间匀速行驶,则浮动车在路段L2的路段行程时间可由浮动车经过路段节点2和节点3的时刻求差值确定,即:
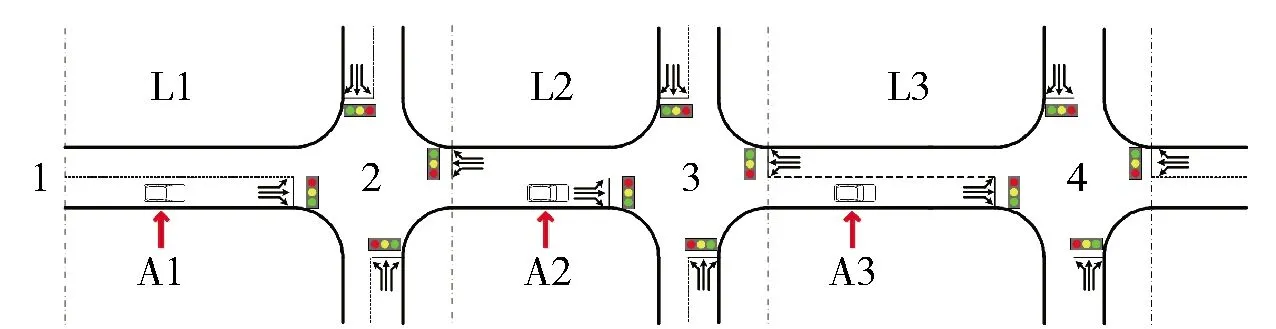
图2 主干道空间平均法计算示例Fig.2 Whole calculation process of the model
tL2=t3-t2
(1)
式中:tL2表示浮动车在路段L2的路段行程时间,单位为h;t3表示浮动车通过路段节点3的时刻;t2表示浮动车通过路段节点2的时刻。
浮动车通过节点2的时刻为:
(2)
式中:tA1和tA2分别表示浮动车通过数据输出点A1和A2的时刻;RA1-2表示数据输出点A1到节点2的路段长度,单位为km;RA1-A2表示数据输出点A1到数据输出点A2的路段长度,单位为km。
同理得浮动车通过节点3的时刻:
(3)
式中:tA2和tA3分别表示浮动车通过数据输出点A2和A3的时刻;RA2-3表示数据输出点A2到节点3的路段长度,单位为km;RA2-A3表示数据输出点A2到数据输出点A3的路段长度,单位为km。

(4)
进一步可以算出浮动车在路段L2的平均行程车速vL2:
(5)
式中:RL2为路段L2的长度,单位为km。
为分析浮动车系统在当前浮动车比例下各路段的估计精度,通过浮动车检测数据和各公式计算出各路段的估计平均行程车速v,通过仿真软件可以获取各路段的真实行程车速vt。定义路段平均车速相对误差θ为:
(6)
2.2 浮动车比例取值方法步骤
基于以上对空间平均法计算平均行程车速的说明,得出基于TransModeler仿真软件的浮动车比例取值方法步骤。
第1步:建立相对误差和浮动车比例的函数关系式F:
θ=F(P)
(7)
式中:θ表示通过浮动车数据计算出的平均行程车速与真实平均行程车速之间的相对误差;P表示浮动车占全部车辆的比例,即P与θ满足函数映射关系F。
第2步:确定路网条件及各变量取值,进行仿真实验。本方法主要确定P与θ之间的关系,因此其他交通参数如路网中各路段属性、路网交通需求等均需在仿真开始前设定。通过仿真实验获取不同浮动车比例下浮动车的平均行程车速和真实行程车速,并进一步计算得出不同浮动车比例下的误差值。

(8)

(9)
则在时间间隔μ内路段通过的浮动车数VFμ应满足:
(10)
若不满足式(10),则认为此时段浮动车数据无效,应予剔除。
第4步:确定最佳效用值。随着浮动车比例P的不断增大,车速相对误差θ会不断缩小,但无限增大P不仅不现实,也会带来更高的成本。考虑到在P增加到一定程度后,继续增大P对θ的改善作用十分有限,因此假定存在最佳改善值ψ,在改善作用达到该值时就可以认为获得了最佳效用值P*,车速相对误差θ、浮动车比例P和最佳改善值ψ之间存在如下关系:
(11)
以函数形式则可表示为:
F′(P)=ψ
(12)
假设导数函数F′存在反函数G,则易得:
P*=G(ψ)
(13)
式中:P*即为求得最佳效用的浮动车比例。
基于TransModeler仿真软件的浮动车比例取值方法主要包括网络建模、仿真计算和精度分析3个模块。图3为基于TransModeler仿真软件的浮动车比例计算方法框架。

图3 基于TransModeler的浮动车比例计算方法框架Fig.3 Framework of calculation method of floating vehicle based on TransModeler
3 数值分析
为验证所建立的浮动车比例确定方法具有一般适用性,建立了如图4所示的经典Florian路网,进行数值分析。Florian路网设计原理采用多路径交通分配法,与传统单路径相比,克服了流量全部集中于最短路的不合理现象。各出行路径长度取决于对应路径的流量分配大小,反映了出行路线被选择的概率随该路径长度增加而减小的客观规律,且充分考虑了路权与交通负荷之间的关系,即考虑了道路通行能力的限制。仿真算例的设计充分考虑了出行者的路径选择问题,符合实际交通路网,在国际上较为通用。
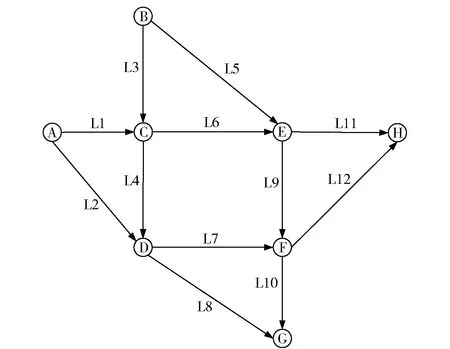
图4 路网拓扑图及O-D交通需求Fig.4 Road network topology and O-D traffic demand
3.1 数据基础
网络拓扑图及各O-D对之间真实的交通需求如图4所示。该路网包含8个节点,12个路段,4个O-D对分别为A-G、A-H、B-G和B-H。仿真运行时间为早高峰7:30—8:30时段,仿真时长为60 min,其中7:15—7:30为仿真预热时段,预热时段的出行需求量与研究时段开始时的出行需求量相同,数据统计计算周期为5 min。路网中各O-D对之间的O-D需求见表1。TransModeler仿真路网和节点E车道组成情况如图5和图6所示,仿真模型中车辆跟驰与换道相关参数按默认取值。

表1 真实O-D需求表
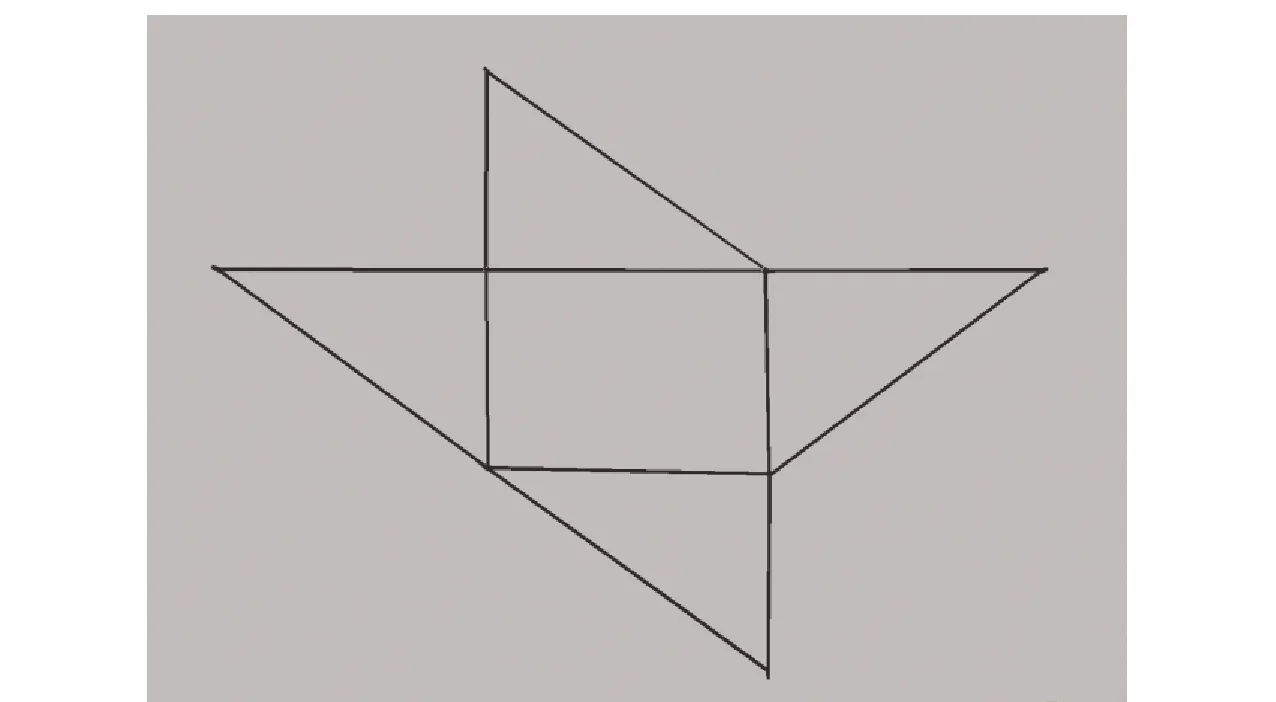
图5 TransModeler仿真路网Fig.5 TransModeler simulation road network
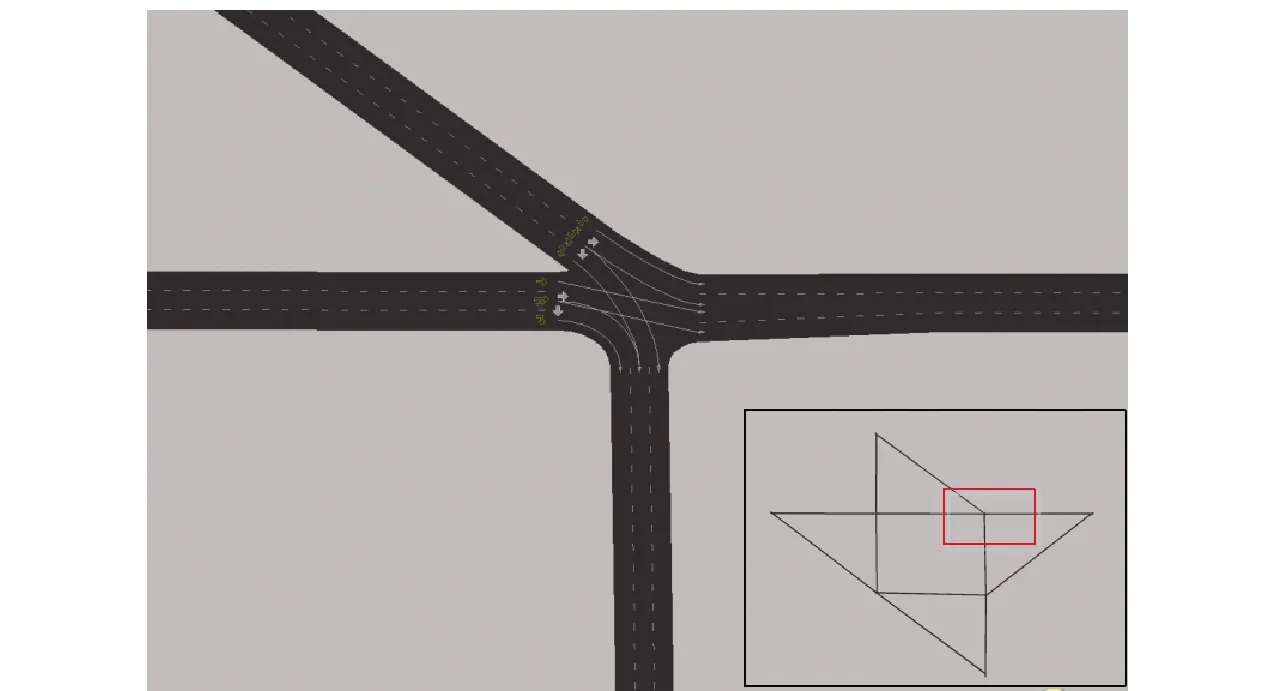
图6 节点E车道组成Fig.6 Composition of node E
路网中各路段的基本交通属性参数见表2。
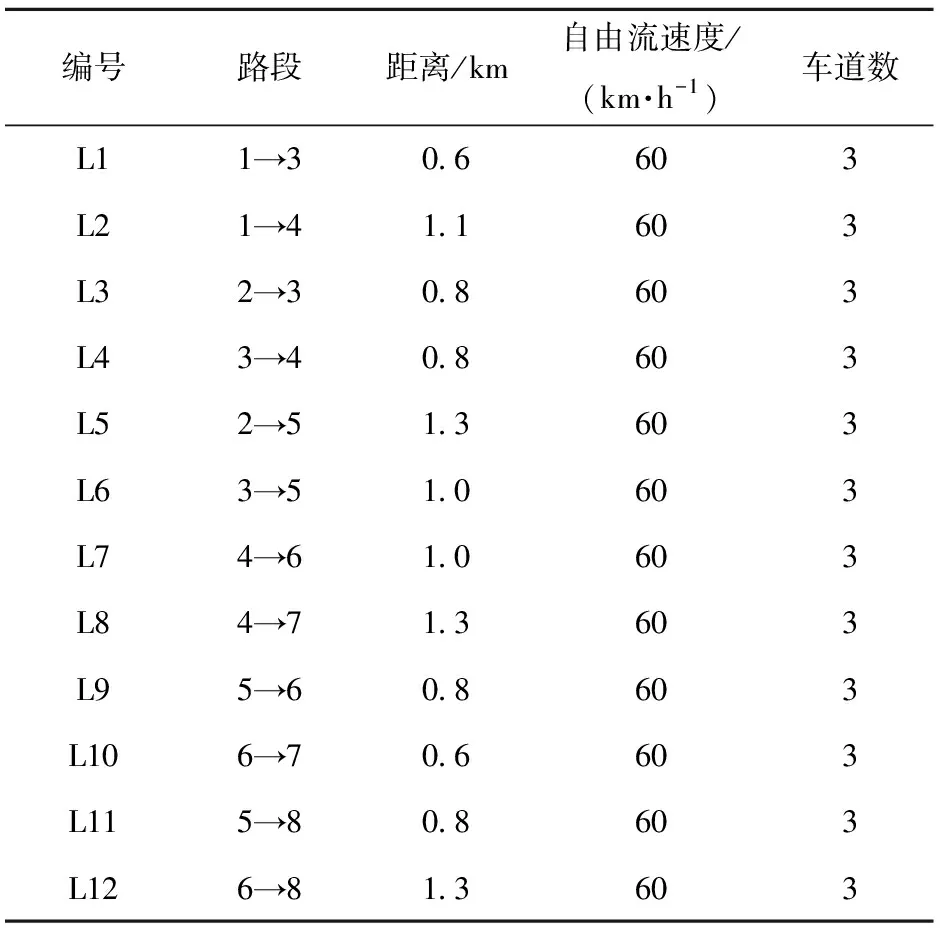
表2 路网中路段基本属性参数
3.2 求解结果及分析
按照2.2节所示的基于TransModeler仿真的浮动车比例取值方法步骤,完成对案例路网的网络建模、仿真计算和精度分析。从案例路网中选取路段L11进行分析,整理仿真得到的浮动车比例P与通过浮动车数据计算方法得到的计算平均行程车速v、通过仿真软件获得的真实平均车速vt和车速相对误差θ的对应值关系见表3。
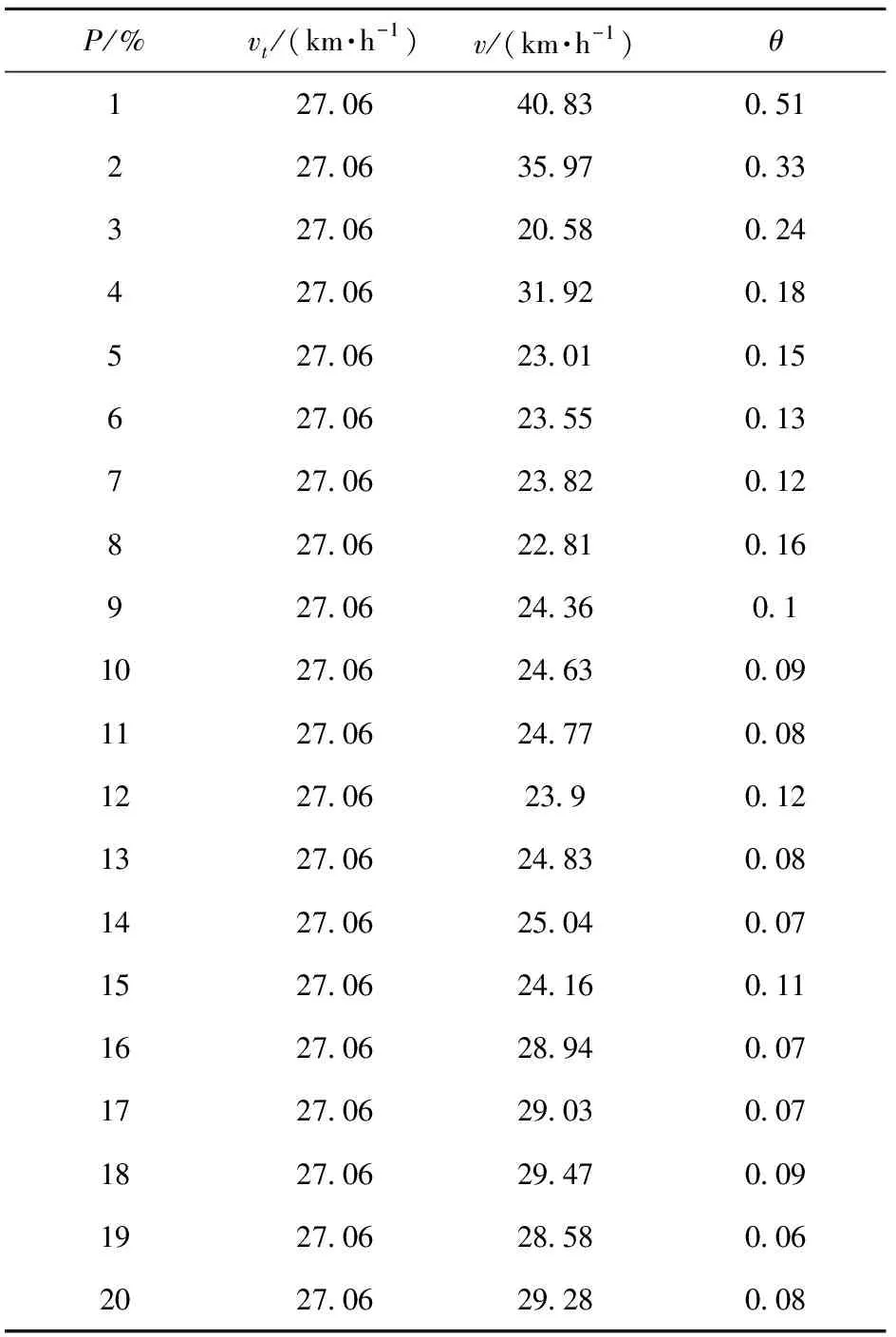
表3 路段L11的浮动车比例与相关参数值对照表
利用数据处理软件拟合得到全部路段的浮动车比例与相对误差关系函数F(P)如图7所示。
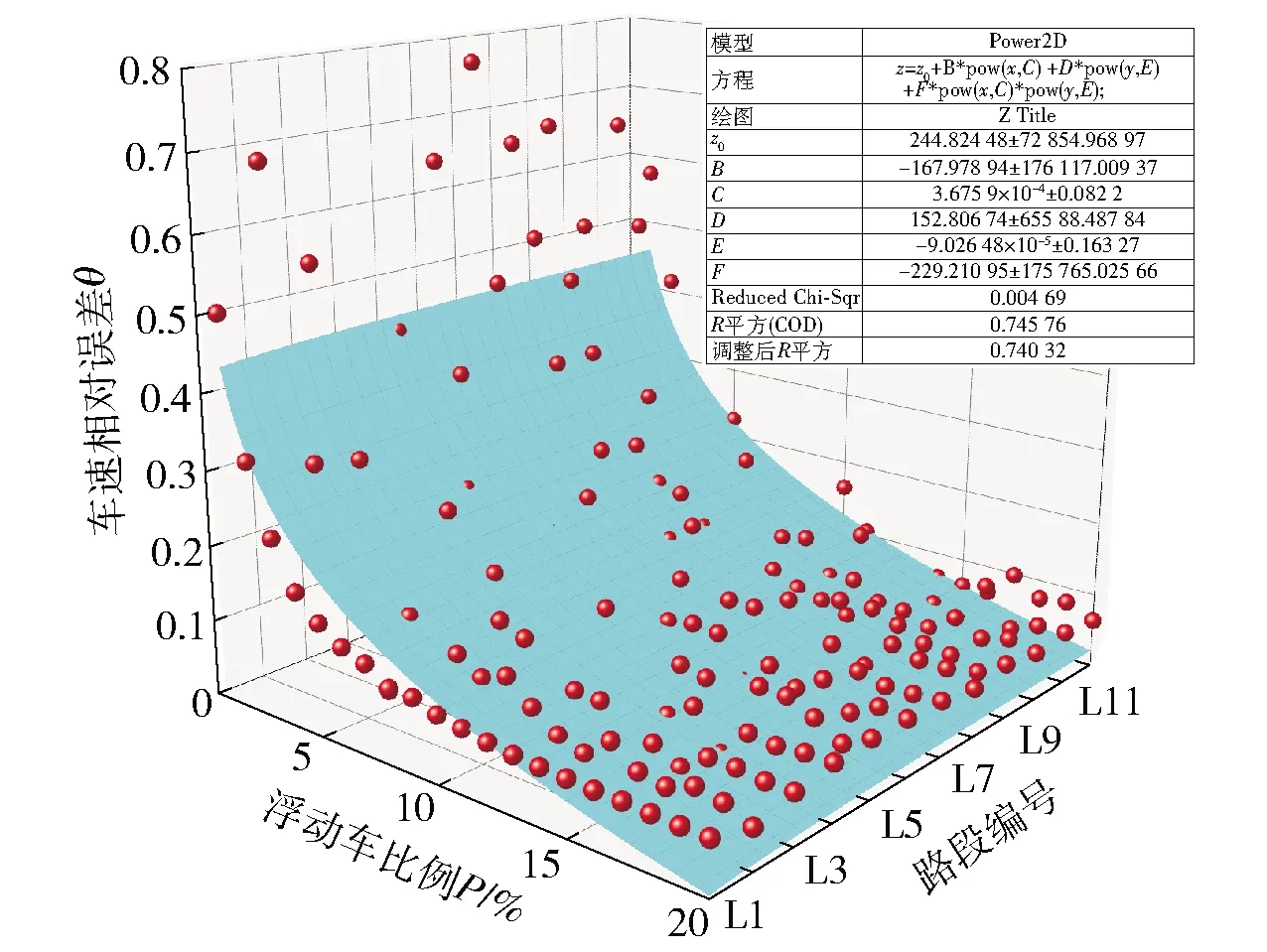
图7 浮动车比例与车速相对误差关系图Fig.7 Diagram of floating vehicle proportion and relative error of speed
通过对图7中所有路段的浮动车比例与车速相对误差之间的关系进行分析得到:
1)随着浮动车比例的增大,各路段间的车速相对误差都有明显减少,且各路段的车速相对误差在较高的浮动车比例下逐渐趋于相同,反映出浮动车比例在较低水平下的增加对减少车速相对误差作用显著;而当浮动车比例在较高水平下时,浮动车比例的增加对减少车速相对误差的作用明显减弱,证明了选取恰当浮动车比例的必要性。
2)所有路段的浮动车比例与车速相对误差在空间上的分布关系可以用幂函数曲面较好地拟合,其拟合结果如图7所示。
3)观察图7及其幂函数可以发现,对本文的仿真实验而言,当浮动车比例不小于5%时,车速相对误差可以到达一个较低的水平,浮动车的计算车速与路段真实平均车速相差不超过5 km/h,参数精度可以满足使用要求,因此可选定5%为浮动车比例取值的下界;而当浮动车比例大于8%时,车速相对误差的变化与浮动车比例的增加表现为弱关系,从节约成本的角度考虑,可选定8%为浮动车比例取值的上界。综上所述,对案例路网而言浮动车比例的取值为5%~8%。
4 模型对比
为检测本文所提模型的效果,在路段设置条件相同且浮动车比例取值为5%~8%的情况下,与其他浮动车比例取值方法进行误差比对[6]。
模型一为基于路网覆盖率的方法,根据式(14)与流速密的关系计算,可得到对比模型一的车速相对误差。
(14)
式中:E1为模型一的浮动车在全路网的覆盖率;α为浮动车在全路网中的占比;ρi为路段i上的平均交通流密度,单位为veh/km;L为路段平均长度,单位为km;Nr为路网总体车辆数目,单位为veh;Mi为第i种类型路段的数量。
模型二为基于浮动车分布的方法,根据式(15)和本文设定的浮动车比例,可得到模型二的车速相对误差。
(15)
式中:E2为模型二的浮动车在全路网的覆盖率;Nfi为浮动车在道路等级为i的路网中覆盖的路段数;Nfij为浮动车j穿行的路段数;vi为浮动车j在计算时间内在道路等级为i路段上的行驶速度,单位为km/h;T为浮动车数据系统的计算间隔,单位为h;Li为路段的平均长度,单位为km;αi为采样因子;Qfi为i路段上处于在线状态的浮动车数量,单位为veh。假定车辆穿行部分路段等同于完整驶过,需附加系数弥补理论假设导致的偏小值(0.7)。
3种模型车速相对误差对比如图8所示,在仿真得到的浮动车比例P的情况下,基于路网覆盖模型略优于基于浮动车分布模型,本模型的车速相对误差最低且波动幅度较小。在准确确定路网浮动车比例的前提下,基于TransModeler仿真的精度更优。
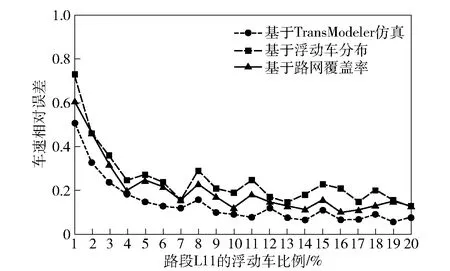
图8 3种模型的路段L11车速相对误差对比Fig.8 Comparison of the relative error of the L11 vehicle speed of the road sections of the three models
5 结论
为建立适用于大型路网下满足覆盖率以及高精度要求的浮动车比例选取方法,本文开展基于TransModeler仿真的浮动车比例取值方法研究,包括确定浮动车检测数据评价指标与建立浮动车比例取值方法。本模型基于浮动车比例取值的方法综合考虑了所得浮动车数据的精确性与数据获取成本,从数值分析结果来看,对案例路网而言浮动车的取值比例应在5%~8%为最佳。本文所建立的方法可以获取大型路网交通流运行状况,为智能交通系统提供高精度的数据支撑。在相同条件下与其他模型相比,本模型的车速相对误差最小。
