基于特征模型的高速电机自适应抗饱和控制
2021-10-13曹阳郭健
曹阳, 郭健
(南京理工大学 自动化学院,南京 210000)
0 引 言
高速永磁同步电机具有体积小、高功率密度和动态响应快的等特点,无需借助复杂、维护困难的变速装置,可直接与高速负载或原动机相连[1-2]。在高速机床、高速电主轴、鼓风机、高速航空航天传动、新能源等高速直接驱动领域具有广阔的应用前景[3-5]。
高速电机在高速运行时,容易因为磁饱和引起电机内部电感等参数变化,铁的损耗也会在高频运行下增加。这两个因素存在会影响矢量控制系统的动态和稳态性能,所以同时考虑铁损及磁路饱和对构建高速电机的模型和控制器设计至关重要[6-10]。文献[7]假设q轴电感为定值,拟合了d轴电感和d轴电流的关系,铁损耗的影响则通过在d-q轴等效电路中增加一个分流电阻来考虑。但实际q轴电感值不是恒定的。文献[8]采用递推最小二乘法对电感Ld和Lq的变化进行了数值模拟和回归,然而,饱和效应和电感的变化没有被解析表示,没有考虑d-q轴之间的非线性交叉饱和效应。文献[9]没有考虑铁损情况下,提出了一个简单的考虑磁路饱和的数学模型,并验证了磁饱和效应。文献[10]融合损耗和干扰观测器,对高速电机设计无传感器算法,通过有限元分析了不同转速下的铁损电阻与d-q轴电流的非线性关系,但是未给出磁链和电感的变化表格。
高速永磁同步电机是一个物理受限系统,所能承受的电流是有限的,在设计控制器时通常会对电流进行限制,系统饱和限制会产生windup现象,恶化调速性能,因此需要进行抗饱和控制研究[11]。文献[12]应用Anti-windup技术,处理具有严格反馈形式的单输入自适应控制系统的饱和问题。通过在不饱和的情况下对自适应律进行适当的修改,可以在输入饱和期间防止过度的自适应。文献[13]考虑输入饱和和外部扰动的不确定,基于Backstepping方法来对饱和现象进行补偿,但是该方法在控制器的设计中需要对虚拟控制量重复微分,如果系统模型阶数高的话,会增加设计的复杂性。文献[14]提出一种基于二阶滑模的抗饱和控制方法,对永磁同步电机系统的windup现象进行抑制,提高了系统的速度跟踪性能。
大部分自适应控制,都是建立在精确模型的基础上,在实际情况下,由于各种未知非线性和外界诸多干扰,人们难以获得系统精确的机理模型。即使获得了相对精确的模型,也可能太复杂难以使用。针对这些问题,吴宏鑫院士等人提出了特征建模的思想[15]。特征模型一般用一阶或二阶差分方程或微分方程来描述,有关信息都压缩到几个特征参数中,并不丢失原有的信息。特征模型建立的形式比原对象动力学方程简单,工程容易实现。文献[16]针对一类可由一阶特征模型描述的被控对象,通过参数整合,将系统特征压缩到一个时变参数中,进一步减少需估计的参数。文献[17]使用二阶连续特征模型并结合动态面控制方法,仅利用其输出信息即可实现高精确度的输出反馈控制。
因此,基于上述观察结果,本文针对高速永磁同步电机调速系统,提出一种基于特征模型的自适应控制器(adaptive control based on characteristic model)。首先搭建考虑磁路饱和及铁损的高速电机模型,更准确地模拟高速电机运行时的状态。其次 根据特征建模设计控制器,将未知参数压缩,只需要系统的输入输出,易于控制器设计。最后仿真结果表明,所提控制方法可以有效的削弱饱和效应,提高了系统跟踪精度和抗干扰能力。
1 高速电机特征模型建立
图1给出了包含铁损的永磁同步电机d-q轴等效电路,其中:ud、uq、id和iq是同步帧中的d-q电压和电流;Rs是定子电阻;Ld和Lq是d-q轴电感,ψm是磁链[18-19]。
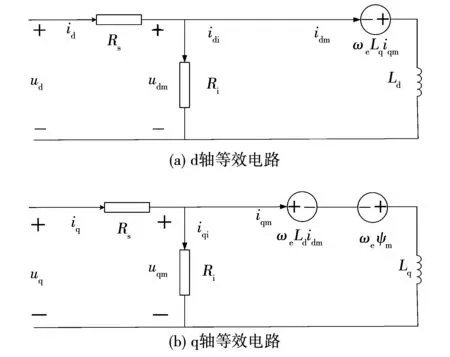
图1 包含铁损的d-q轴等效电路Fig.1 d-q axis equivalent circuits for motor including the iron loss
为获取电机模型中相关电机参数,使用电磁场有限元法进行电机电磁场数值分析。电机总的铁耗由磁滞损耗、涡流损耗和附加损耗组成,即
Pi=Ph+Pc+Pe=Khf(Bm)2+Kcf(Bm)2+
Kef(Bm)1.5。
(1)
其中kh、kc、ke分别为磁滞损耗系数、涡流损耗系数、杂散损耗系数。
铁损等效电阻可采用下式计算:
Ri=Eq/Pi。
(2)
式中:Eq为定子反电动势;Eq、Pi可由有限元分析计算得到。表1列出了被测试的电机设计参数。
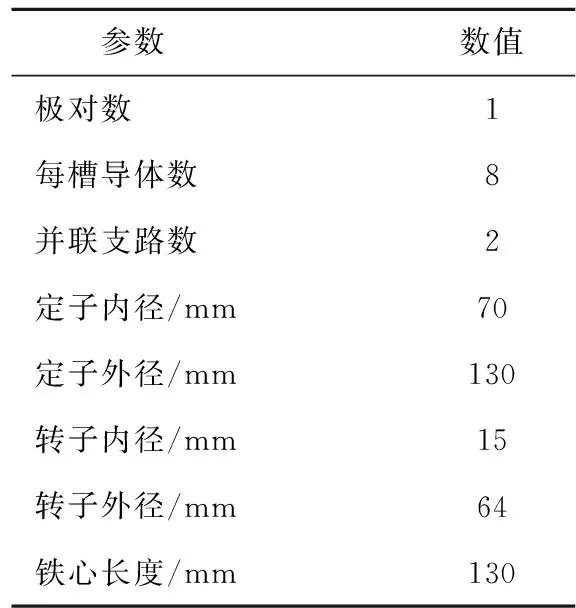
表1 永磁同步电机基本参数
通过有限元计算得到的电机各参数关于d-q轴电流分量非线性关系如图2所示。
图2 电机参数随d-q轴电流变化曲线Fig.2 Variation curve of motor parameters with d-q axis current
考虑铁损的高速PMSM数学模型[20-21]为:
(3)

高速电机系统其目的是使输出转速尽可能接近地跟踪任何平滑的期望转速轨迹。根据特征建模思想[15],对高速电机系统的输入输出关系构建离散形式的特征模型,表示为如下二阶差分方程:
y(k+1)=α1(k)y(k)+α2(k)y(k-1)+
β1(k)u(k)。
(4)
其中:y(k)为系统输出;u(k)为系统输入;α1(k)、α2(k)、β1(k)为系统的特征参数。
1.1 参数投影和参数自适应
要针对特征模型(4)设计控制器,首先要在线辨识其特征参数。将特征模型写成如下二阶时变辨识模型:
y(k+1)=φ(k)Tθ(k)。
(5)

在下面的部分中,•j表示向量•的第j个分量,并且针对两个向量的运算<是根据向量的相应元素来执行的。

(6)
其中j=1,2,3,4.proj{•}可以保证估计参数在有界凸闭集Ds内。
为保证参数估计值的有界性,设计未知参数估计自适应律
(7)

1.2 特征模型的验证
特征模型建立的过程如图3所示,根据特征模型的理论,通过参数估计对特征参数进行辨识,建立了系统的特征模型。针对考虑铁损的电机模型与所建特征模型输入同样的输入,看其输出量是否一致。输入信号为幅值为15的阶跃信号,其验证结果如图4所示。
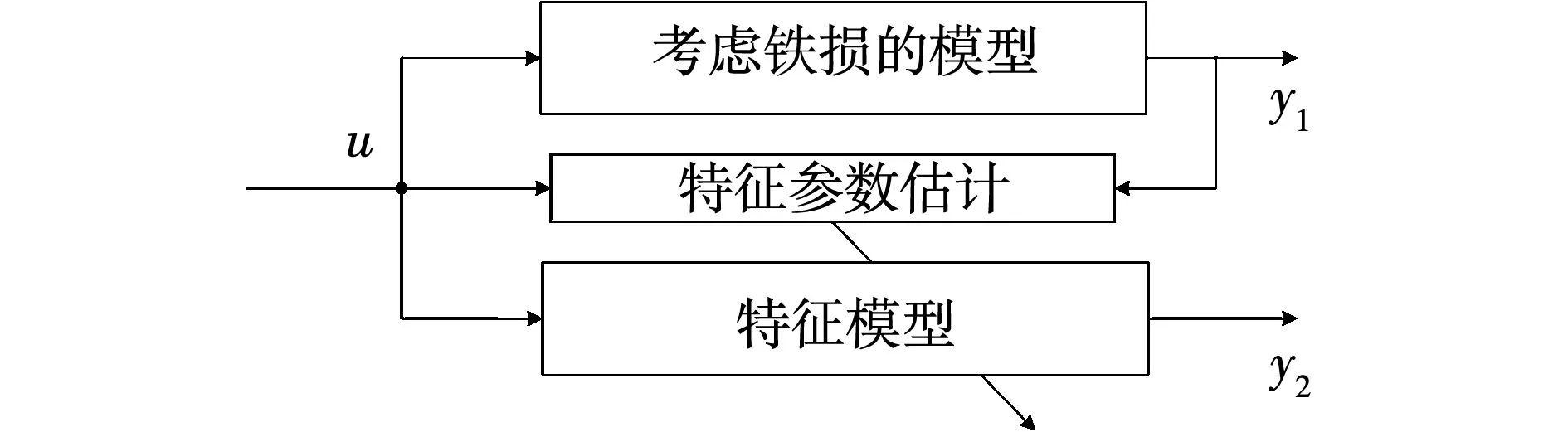
图3 特征模型验证框图Fig.3 Verification block diagram of characteristic model
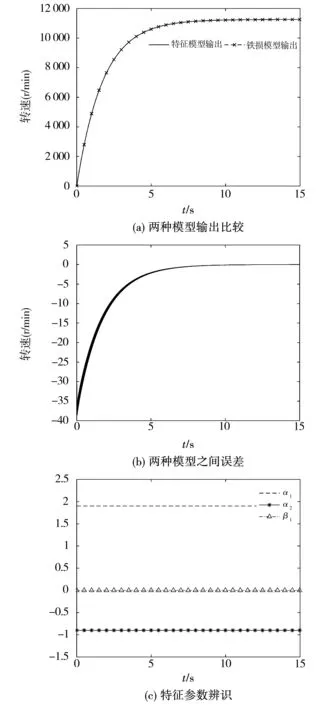
图4 特征模型验证结果Fig.4 Verification results of characteristic model
由图4可知,随着特征参数收敛,两个模型误差逐渐为趋近0,说明特征模型能很好地描述系统原动力学模型的输入输出特性,所以将特征模型替代考虑铁损的模型来设计控制器。
2 自适应控制器设计
2.1 辨识模型
特征模型(4)可被重写为:
(8)

所以上式可以改写为
(9)

假设1:从工程实践中可知,对于稳定对象,参数不确定性和不确定非线性的程度已知:即,
(10)
其中θmin=[θ1min,…,θ3min]T,θmax=[θ1max,…,θ3max]T,δd是已知的。
2.2 抗饱和控制方法
高速永磁同步电机调速系统是一个物理受限系统,处于对系统安全考虑,需要对控制器输出进行限制。在这种情况下,如果控制中包含积分作用,当控制器限制饱和时,积分器的控制信号会仍然增大从而产生Windup现象,导致误差的积累,恶化系统性能,最终导致系统不稳定。
当系统控制量被限制以保护系统时,系统可能发生不稳定的响应。具体表现为超调量增大和调节时间变长。为了降低系统饱和的影响,抗饱和PID控制方法被提出[22],其结构如图5所示。
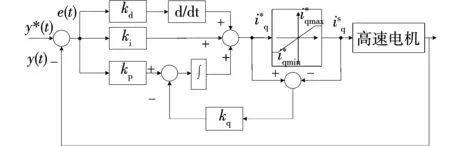
图5 抗饱和PID控制器结构Fig.5 Structure diagram of anti saturation PIDcontroller
其表达式为:
(11)
根据抗饱和PID控制思路,设计的自适应抗饱和控制结构如图6所示。

图6 自适应抗饱和控制结构Fig.6 Structure diagram of adaptive anti saturationcontroller
2.3 自适应控制器设计
控制目标是设计自适应控制器使得系统的输出y(k)跟踪期望输出yd(k),定义跟踪误差函数为
e(k)=y(k)-yd(k)。
(12)
定义误差函数为
s(k)=c1e(k)-c2E(k-1)。
(13)
其中c1>0,c2>0分别为比例积分增益,逻辑积分误差项为
(14)
其中:kcw为抗饱和反馈增益;ci和ki为可调系数。当误差e(k)正向或负向增大时,e(k)[e(k)-e(k-1)]>0,需要增强积分作用使e(k)快速下降,ki取为较大值k2,反之,可以取ki=0以减小积分作用避免超调。在必要的时候选择ci立刻去除积分作用,正常积分时ci=1,不需要积分时取ci=0。具体如下:
(15)
(16)
通过以下条件导出控制率
Δs(k)=s(k)-s(k-1)=0。
(17)
由式(17)可得
s(k+1)=s(k),
(18)
c1e(k+1)+c2E(k)=s(k),
(19)
c1(α1(k)y(k)+α2(k)y(k-1)+β1(k)u(k)+d(k)-yr(k+1))+c2E(k)=s(k)。
(20)
根据式(20)设置控制率为
u(k)=ua(k)+us(k)。
(21)

(22)
(23)
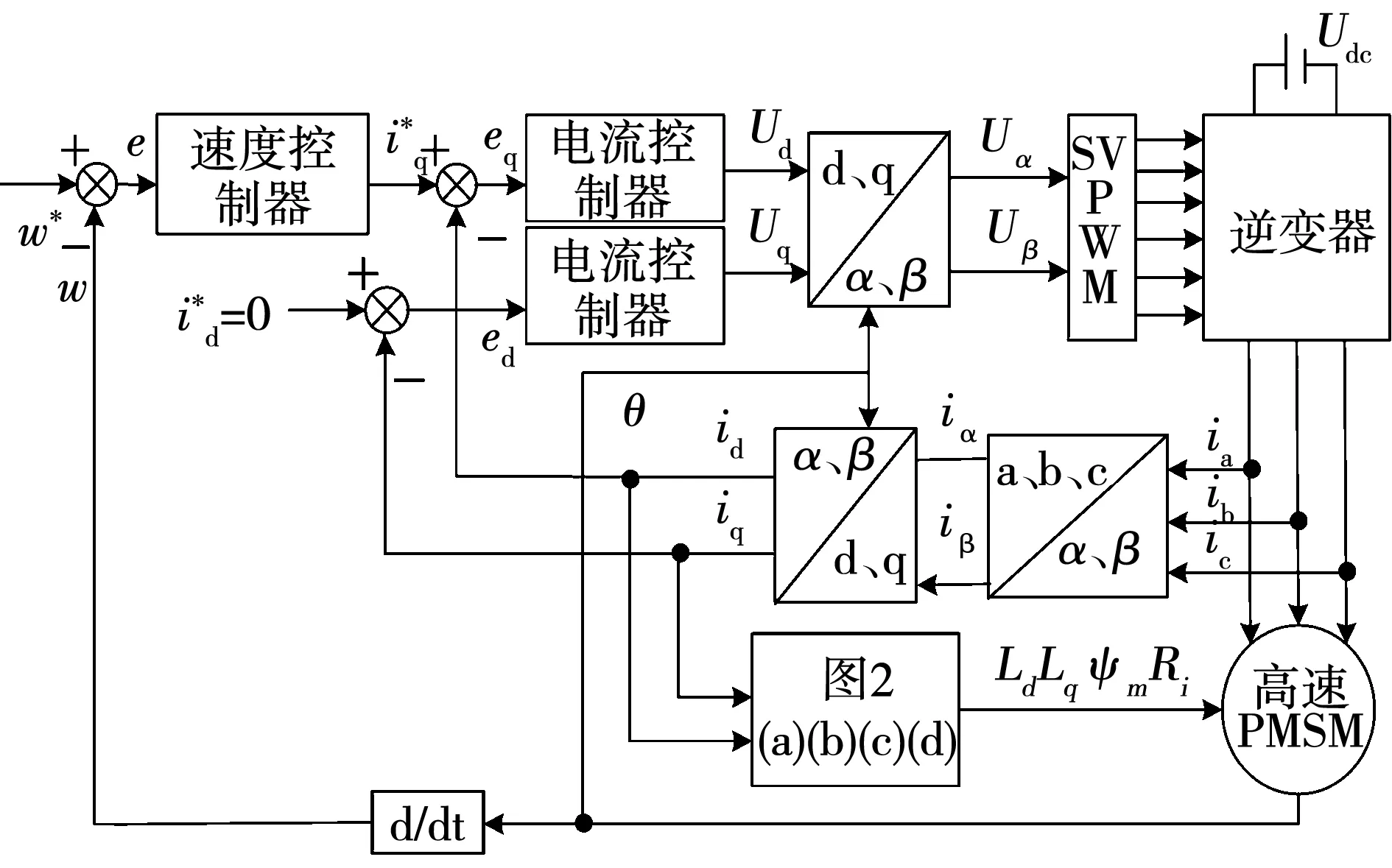
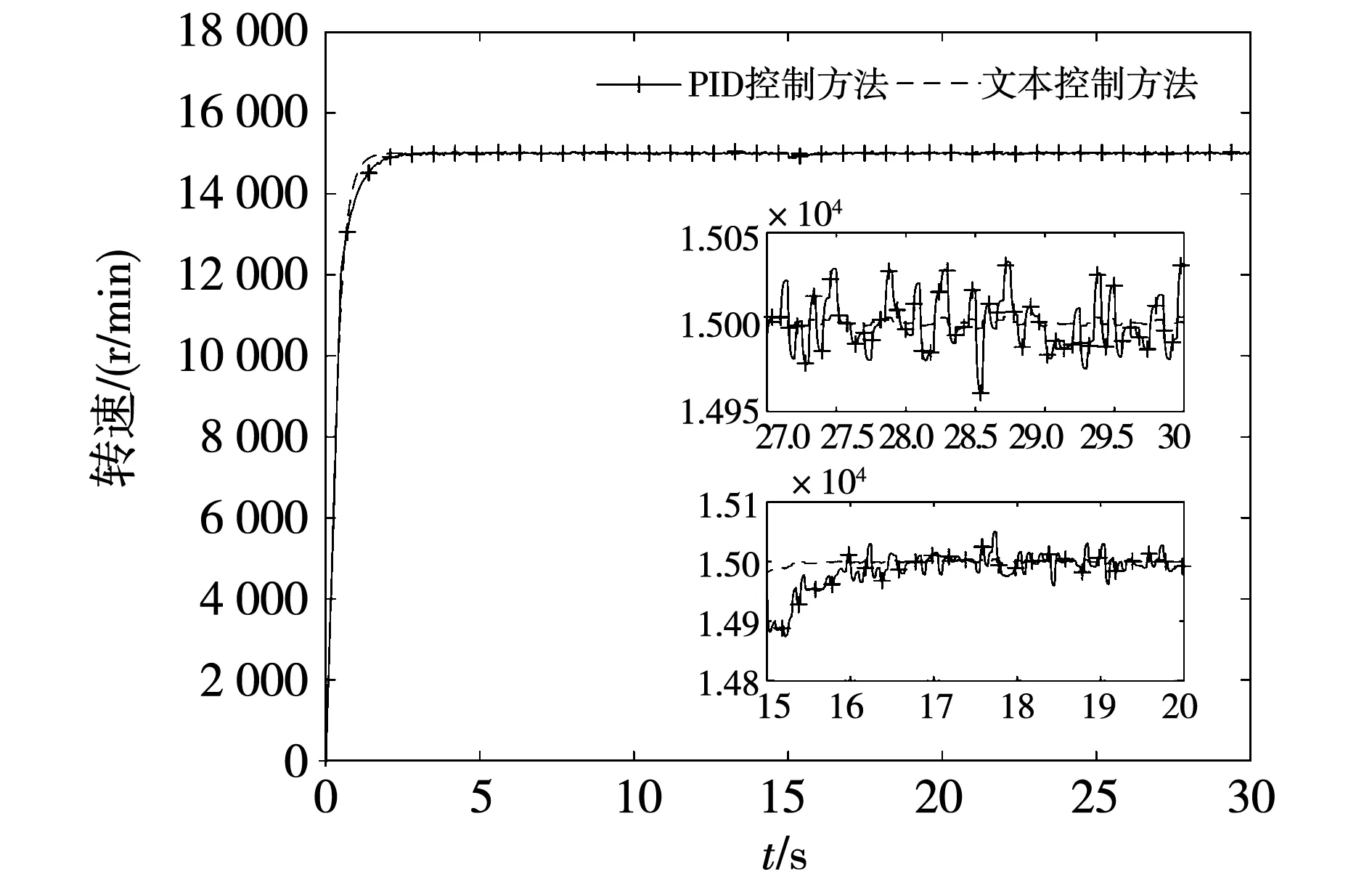
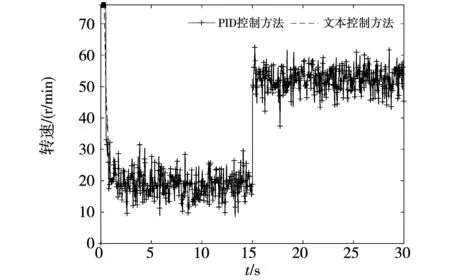
其中:0 定理1:针对特征模型(4)描述的复杂对象,所有信号都是有界。采用自适应控制律(21)和参数更新律(7),闭环系统的跟踪误差和参数估计误差是有界的。 证明:由式(13)可得 s(k+1)=c1e(k+1)-c2E(k)。 (24) 结合式(12)、式(14)得 s(k+1)=c1[y(k+1)-yr(k+1)]+ d(k)-yr(k+1)]+c2E(k)= yr(k+1)-k1sgn(s(k))+ yr(k+1)]+c2E(k)= s(k)+d(k)-c1k1sgn(s(k))。 (25) 为了验证该方法的可行性和有效性,对高速永磁同步电动机控制系统进行仿真。考虑磁路饱和跟铁损的影响,通过有限元分析计算出电感、磁链、铁损电阻跟d-q轴电流的非线性关系,导入Matlab/SIMULINK中进行建模,模拟高速电机运行时内部参数的变化。使得模型更接近高速运行工况。图7建立了高速永磁同步电机矢量控制系统的框架,它由一个高速永磁同步电机(permanent magnet synchronous motor,PMSM),空间矢量脉宽调制(SVPWM)模块,Park和Clarke坐标变换、电压源逆变器、电流调节器以及速度控制器。本文设计的是速度控制器,电流控制器使用PID控制。此外,定子相电阻为0.024 4/Ω、空载转动惯量设置为0.001 284 74/(kg·m2)。 图7 高速电机矢量控制整体结构Fig.7 Overall structure block diagram of high speed motor vector control 将所提出的基于特征模型的自适应控制器(ACBCM)与抗饱和PID控制器的性能进行比较,各控制器参数如下: 抗饱和PID控制参数设置为kp=0.25,ki=0.5,kd=0.004,kq=4。 自适应抗饱和控制参数设置为μ=0.995,c1=0.2,c2=0.15,k1=0.006,kcw=4; 如图8所示,给定速度15 000 r·min,给定负载1 N·m。可以看出基于特征模型的自适应控制器的性能优于抗饱和PID控制器,在15 s时候给电机突加2 N·m的负载扰动,ACBCM控制下的电机比PID控制更快速恢复到给定参考转速,具有更快的动态响应速度和抗扰动能力,能够满足实际电机控制性能的需要。根据图9可以看出ACBCM跟PID控制都能较快脱离饱和,但ACBCM更快速处理负载扰动并且转矩波动更小。 图8 速度控制比较Fig.8 Comparison of velocity curves 图9 控制输入比较Fig.9 Comparison of control input curves 此外,通过仿真实验对抗饱和方法的性能进行了评价。比较了有抗饱和的ACBCM和无抗饱和的ACBCM两种方法,比较结果如图10、图11所示,当控制系统有饱和极限时,无抗饱和的ACBCM性能比有抗饱和的ACBCM差,并且转速存在大的超调和波动,不考虑抗饱和ACBCM需要更长的时间来实现速度收敛和系统稳定。 图10 抗饱和转速曲线比较Fig.10 Comparison of speed curves 图11 抗饱和控制输入曲线比较Fig.11 Comparison of control input curves 本文针对高速电机系统,采用有限元分析方法获取电机参数与交直轴激励电流的变化关系,模拟更精确的高速电机数学模型。使用特征模型设计了一种自适应抗饱和控制器,能很好地描述系统原动力学模型的输入输出特性,然后验证了该建模方法的有效性。通过李雅普诺夫函数证明了其稳定性,与传统抗饱和PID控制器相比,所提出的控制方法具有快速收敛、高鲁棒性和速度跟踪性能,并且设计更加简单和利于工程应用。3 稳定性分析
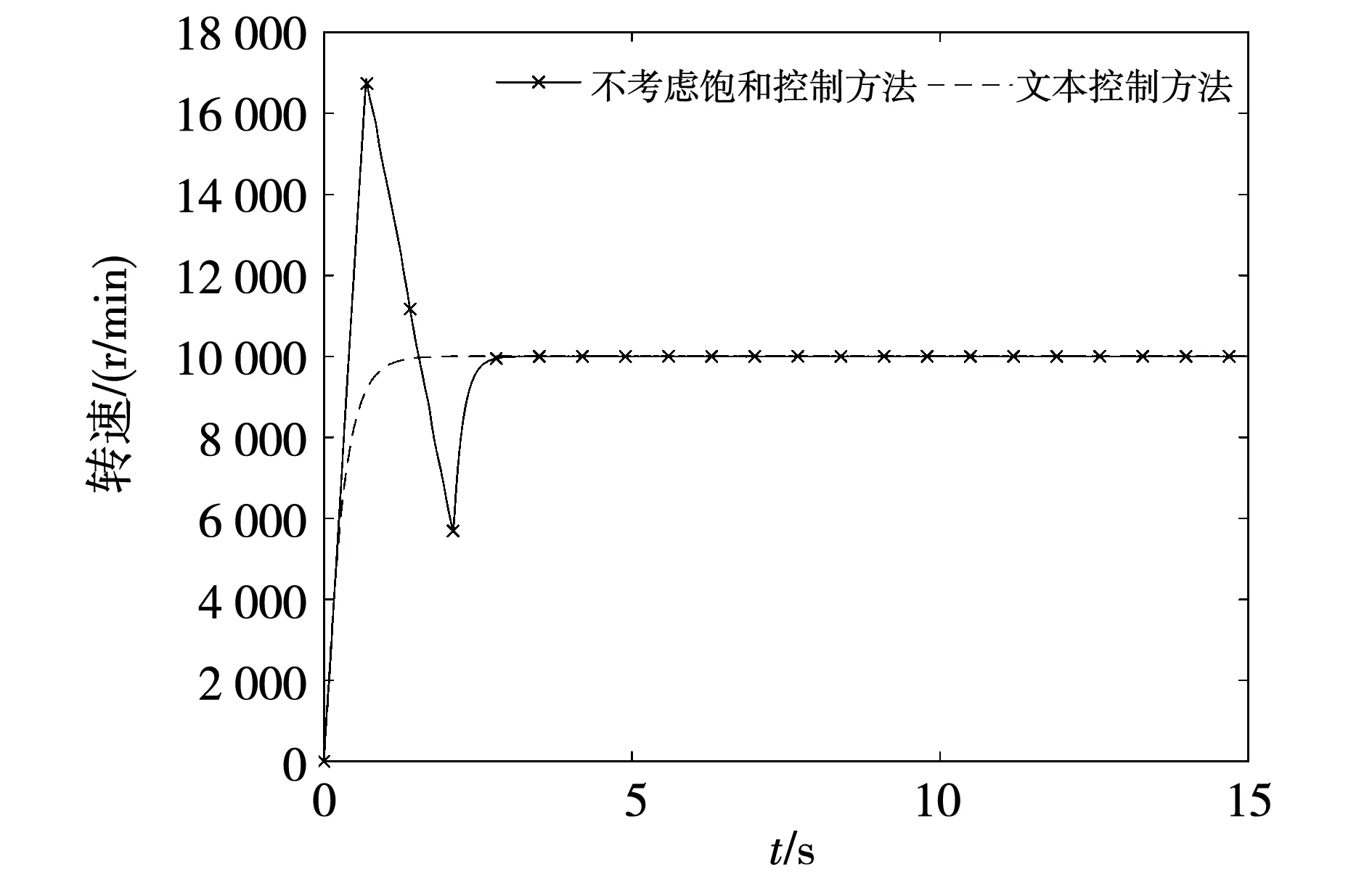
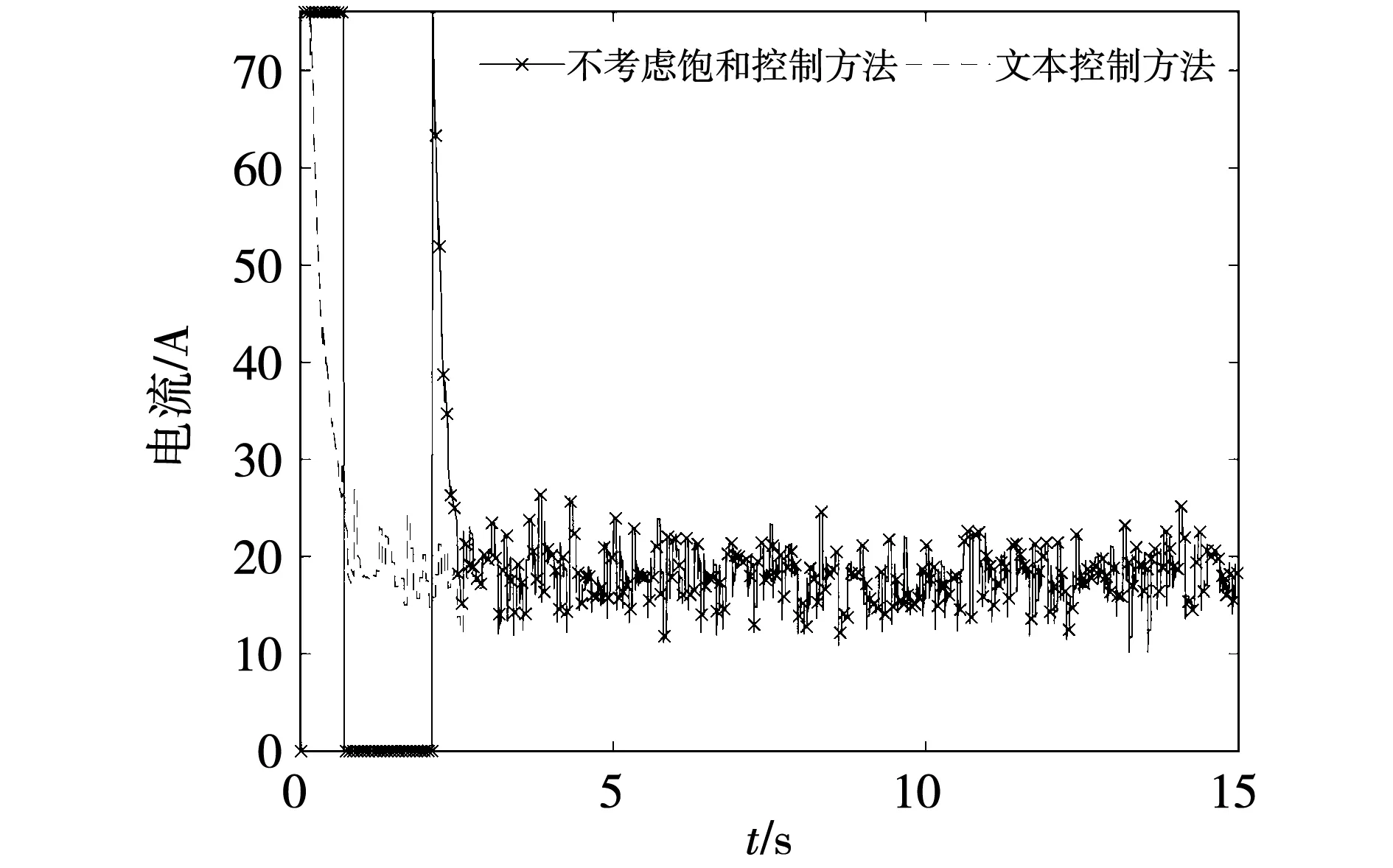
4 仿真结果对比与分析
5 结 论
