一种基于WSN和深度学习的医疗设备定位管理方法
2021-10-13陈娜群
陈娜群
宁波市妇女儿童医院 设备科,浙江 宁波 315000
引言
医疗设备是医院正常运行的必备条件,它在医院的医疗、科研、教学中发挥着重要的作用[1-2]。随着医疗行业的迅速发展,医疗设备的种类、数量不断增多,做好医疗设备的科学化管理,充分发挥医疗设备最大的利用价值是医院长远健康发展的重要条件。智慧医疗的迅速发展,对医院医疗设备的精细化管理提出了新的要求。及时对医疗设备进行定位,快速获取医疗设备的位置,对保障临床用械安全具有举足轻重的作用[3-4]。
目前,对于医疗设备的定位已经取得了一定的研究成果。邵文欢等[5]、梁冰[6]使用条形码技术对医疗设备进行管理,但该方法无法对设备进行盘点以及实现流失设备的寻找;吴菊等[7]提出了一种利用射频识别技术(Radio Frequency Identification,RFID)对医疗器械进行定位,基于此设计了智能动态定位管理系统,该系统对设备进行定位并实时显示设备的使用状况。
目前,国内外大量学者研究了基于无线传感器网络(Wireless Sensor Networks,WSN)的医疗器械室内定位系统,但大多数是绝对定位,即需要精确定位出医疗器械的坐标位置。这类定位方法一般受障碍物的干扰严重,导致定位误差较大,而且定位的代价偏高,不利于大规模部署。而实际应用中无需定位到医疗器械的实际坐标,仅需要知道医疗器械所属房间编号即可,因此本文研究了一种医疗器械相对定位方法,定位医疗器械所属的房间编号。
1 定位方法
本文提出一种基于WSN的医疗设备定位方法,采用LoRa传感器节点构建WSN。该方法利用Krigring插值算法对定位区域内的信号强度(Received Signal Strength Indicator,RSSI)指纹进行预测,然后将预测的RSSI指纹与对应的病房号作为训练数据,利用深度信念网络(Deep Belief Nets,DBN)进行数据的训练,最后将安装在医疗设备上的传感器节点接收到的RSSI信号作为输入数据,最终获得医疗设备所在的具体的病房号,实现医疗设备的相对定位。
1.1 指纹定位方法
WSN指纹定位方法是一种基于RSSI的定位方法,WSN指纹定位方法通过在定位区域内部署一定数量的且位置已知的传感器节点(Micaz节点、LoRa节点等),传感器节点向外发射出电磁波信号,电磁波信号将整个定位区域进行覆盖,由于电磁波信号存在路径损耗,一定程度上表现出距离发射节点越远信号强度越弱的现象,因此定位区域中的每个位置的信号强度都是不同的[8-11]。WSN指纹定位方法利用信号强度差异性进行定位区域RSSI指纹数据库的构建,从而实现指纹定位(图1),其中Beacon节点作为位置已知的锚节点,Node节点是用于辅助建立指纹的节点,当目标节点进入特定的定位区域时,可以通过目标节点所接收到的RSSI值与定位指纹库进行对比匹配而实现定位[12]。
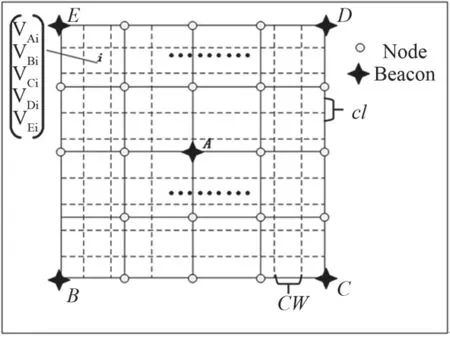
图1 WSN指纹定位方法建模图
1.2 Krigring插值算法
Krigring插值算法由南非的一位采矿工程师于1951提出,该算法是一种求最优、线性和无偏的空间内插法[13-16]。Krigring插值算法可对周围的测量值进行加权以得到未测量位置的值[17]。该算法与反距离权重法相类似,常用的Krigring插值算法计算公式由数据的加权总和组成,其公式如式(1)所示。

式中,N表示测量值的数量;λi表示第i个位置处测量值的权重,该值由测量点与预测位置的距离以及预测位置周围的测量值决定;Z(Si)表示第i个位置处的实际测量值。
1.3 深度信念网络
DBN是在2006年由Hinton提出,它是一种生成模型,网络训练是对神经元间的权重做训练,使得整个网络能够以最大概率对用于训练的样本数据进行生成,DBN常用于数据的分类以及数据的生成[18-21]。DBN由多层网络构成,每层网络中包含神经元可以分为显性神经元和隐性神经元,一般显性神经元用来输入数据,隐性神经元用来提取特征。DBN的顶层网络,理论上是可以选择很多算法,如SVM、Softmax、HMM、Logistic、Linear等。在本文的定位应用中,选择Softmax作为顶层网络[22],见图2。
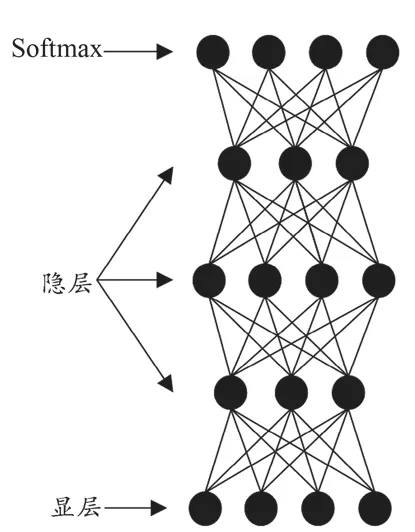
图2 DBN+Softmax的网络结构
1.4 医疗设备定位的数据准备
本研究在医疗设备定位实验中每层楼布置10个LoRa节点,共3层,一共30个节点,每层共有10个房间,共30个房间。将每个LoRa节点接收到的信号都作为特征输入DBN神经网络中用来定位设备的精确位置,30个LoRa节点,那么每一个医疗设备都可以获得一个30维的特征向量。为了将DBN输出的值和医疗器械所对应的房间相对应,需要对房间和DBN输出值做映射。假设一共有1~30号30个房间,那么DBN的输出则是一个30维向量,每一个值代表医疗设备在该房间的概率。为了训练DBN,首先需要准备训练样本,在一个房间内的多个位置测试该位置的LoRa信号,然后通过Krigring插值法近似获得该房间各个位置的信号强度。
2 结果
2.1 Krigring插值法
为了验证Krigring插值方法的有效性,本研究设计了多个方法来采集数据。首先将一个房间网格化,一个房间变成一个3×5的网格,采集其中某些网格的传感器数据,插值余下网格的传感器数据就可以得到整个房间的传感器数据。
插值得到的数据和采集得到的真实数据的误差采用均方根误差(Root Mean Squared Error,RMSE)衡量,RMSE的定义如公式(2)所示。

式中,Z(xi)表示插值所得值,yi表示实际测量值。
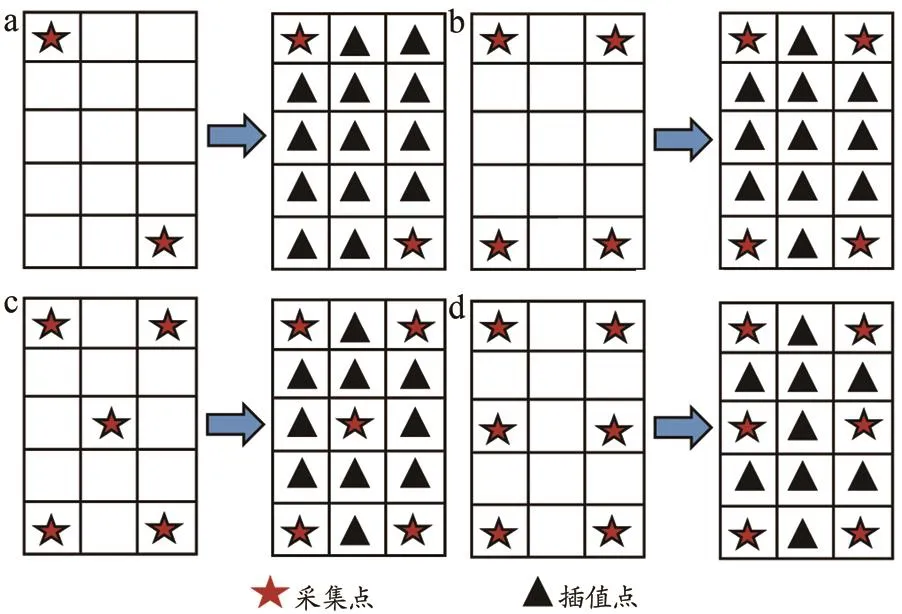
图3 数据采集点和插值点位置示意图
采集点过少会使插值点误差过大,从而导致RMSE过大,方法1得到的RMSE值为0.524,方法2得到的RMSE值为0.377,方法3和方法4都取得几乎一致的RMSE,RMSE值分别为0.235和0.234,本文采用方法3来采集数据。
对每个房间采集5个位置,插值10个位置,共15个位置。在采集数据时每个位置相对于30个LoRa节点的信号都一起采集,每一层采集10个房间。
2.2 DBN定位结果
本研究设计了4种DBN网络结构来进行医疗器械设备的定位,结构如表2所示。

表2 4种DBN网络结构的设计
在训练之前将训练数据按照1:1的比例随机分成两份,其中一份作为训练集,一份作为测试集。
4个神经网络模型的训练结果如图4所示,可以看出DBN_4训练收敛慢于其他几个网络,并且在训练过程中DBN_4的训练集准确率抖动较明显,测试集的准确率也不高。4种模型的训练和测试准确率如表3所示,DBN_6和DBN_10在测试集和训练集准确率上的差别不是很大;DBN_18虽然在取得了99.38%的训练集准确率,但是测试集准确率只有93.89%,说明网络出现了过拟合的现象;综合来看,DBN_10取得了最佳的结果。上述现象的出现可能是因为较小的网络模型拟合能力不够强,导致训练集准确率不高,较大的网络模型太复杂,容易出现过拟合现象。

图4 4种DBN网络模型的训练结果

表3 4种DBN网络模型在测试集和训练集上的准确率(%)
2.3 不同数量的传感器对定位结果的影响
在上文的结果中每一层楼道都布置了10个传感器,为了探究传感器的数量对实验结果的影响,本研究做了以下试验,具体如图5所示。对于10个传感器,每一组分为激活传感器和冻结传感器,激活传感器的数据拿来做训练识别,而冻结传感器的数据不予使用。

图5 传感器数据的选取
由表4可知当传感器数量为8时,DBN_10在测试集上取得了最佳的97.45%的准确率,在训练集上取得了最佳的98.98%准确率;当传感器数量为5时,DBN_6在测试集上取得了最佳的96.83%的准确率,DBN_10在训练集上取得了最佳的98.20%的准确率;当传感器数量为4时,DBN_6在测试集上取得了最佳的95.68%的准确率,DBN_6在训练集上取得了最佳的96.37%的准确率;当传感器数量为2时,DBN_10在测试集上取得了最佳的84.74%的准确率,DBN_10在训练集上取得了最佳的86.35%的准确率。

表4 4种DBN网络模型在测试集和训练集上的准确率(%)
在传感器数量减少的过程中定位的精度缓慢下降,这说明随着有效信息的减少,网络模型的定位精度慢慢减小。
2.4 不同方法定位结果的分析
为了对比实验结果,本研究还选取了SVM、Softmax和Decision Trees方法来对医疗器械设备进行定位。实验结果如表5所示。

表5 3种不同方法在测试集和训练集上的准确率(%)
从表5中的结果可以看出不论是测试集准确率还是训练集准确率,SVM、Softmax和Decision Trees方法均出现了不同程度的下降。
从图6中可以看出,不论是在测试集还是在训练集上的定位精度,DBN_10都取得了最佳的检测结果。随着传感器数量的减少,SVM、Softmax和Decision Trees方法不论在测试集还是在训练集上的定位精度都出现了明显的下降,并且下降的程度大于DBN_10方法,说明DBN_10方法鲁棒性更强。
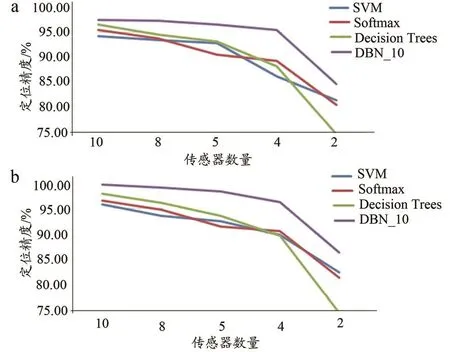
图6 4种定位方法在多种传感器数量下的定位精度
3 讨论
本文研究了一种医疗器械相对定位方法,定位医疗器械所在的房间编号。该方法通过测试加Krigring插值法构建定位指纹,然后通过指纹匹配方法获得定位结果。同时为提高定位精度、降低部署成本,本文提出了一种有效的WSN部署方法。实验结果表明4种DBN模型中DBN_10取得了最佳的结果。较小的网络模型拟合能力欠缺,较大的网络模型会出现过拟合。在本文研究方法中传感器数量减少的过程中定位的精度缓慢下降,这说明随着有效信息的减少,网络模型的定位精度慢慢减小。
国内外对于医疗设备定位系统的研究基本同步。Shirehjini等[23]提出了一种医疗设备定位系统,该系统利用RFID对设备进行定位,系统将RFID标签安装在医疗设备中,并在医院关键区域安装RFID阅读器,阅读器将获得的动态数据实时发送至控制终端,控制终端进行医疗器械的位置计算。Ro等[24]利用RFID技术在医院中安装了实时定位系统,该系统能够及时将病人在手术过程中的身体状况上传至系统,通过该系统对病人身体状况进行数据的采集,以此改善手术中医生的手术流程。
笔者发现,实际应用中无需定位到医疗器械的实际坐标,仅需要知道医疗器械所属房间编号即可,因此本文研究了一种医疗器械相对定位方法,定位医疗器械所属的房间编号。相较于绝对定位,本方法具有受障碍物干扰小、定位代价小、有利于大规模部署等优点。
本文通过设计一种基于WSN的医疗设备定位方法,利用Krigring插值算法对定位区域内的RSSI指纹进行预测,将预测的RSSI指纹与对应的病房号作为训练数据,利用DBN进行数据的训练,最后将安装在医疗设备上的传感器节点接收到的RSSI信号作为输入数据,最终获得医疗设备所在的具体的病房号,实现医疗设备的相对定位。
本文的研究方法虽然在定位精度上取得了较好的结果,但是用WSN对医疗设备进行定位时,需构建RSSI向量指纹,然而当医院环境发生较大变化时,对医疗设备的定位精度具有一定的影响,因此下一步可以继续完善RSSI向量指纹构建技术以提高系统的鲁棒性。
4 结论
医疗设备是医院进行正常医疗工作的必要条件,由于医院和医疗器械产业的快速发展,医疗设备的种类、数量不断增多,为解决医疗设备的科学化管理,快速定位预使用的医疗设备的相对位置,本文利用目前的电子信息技术开发并设计了一套医疗器械相对定位方法,实现对医疗设备的定位,快速获取医疗设备的位置,有利于医疗设备的精细化管理,保障临床用械安全。
