一种高能效的无人机移动中继技术
2021-10-13黄陈浩吉晓东
黄陈浩,吉晓东,2*
(1.南通大学 信息科学技术学院,江苏 南通 226019;2.南通先进通信技术研究院,江苏 南通 226019)
与传统地面通信节点相比,无人机通信设备具有可按需部署、存在视距链路(line of sight,LOS)和机动性高等优点[1-2],在面对一些应急或临时通信需求时,性价比相对较高。同样,在海面、山脉等一些地面基站无法轻易架设的地点,无人机通信设备也能发挥极大的作用[3]。在传统中继通信系统中引入无人机技术,不仅可以提高系统频谱效率获得更大的吞吐量,还可以扩大中继系统的覆盖范围[4]。但是,无人机自身负载能力有限,在装备必要的通信设备后,可携带的能源存在限制[5-6]。因此,如何用尽可能少的能耗实现通信系统吞吐量的最大化成为目前无人机中继通信系统亟需解决的一个问题。
目前,无人机移动中继技术受到国内外学者的广泛关注。以往的文献主要针对无人机移动中继的吞吐量优化问题进行研究。文献[7]通过联合功率分配、轨迹等参数,实现无人机移动中继系统吞吐量的优化。文献[8]考虑圆形轨道下半双工无人机中继,优化系统吞吐量问题,优化无人机中继两跳之间的时间分配函数。文献[9]则综合考虑机身姿态、天线特性、气候状况及信道衰落等影响,建立了两跳中继链路的传播损耗模型。然而在实际应用中,无人机常常会受到负载能量的约束,无法完成长时间的工作,因此需要对无人机中继的能效问题进行研究。文献[10]根据无人机的参数(质量、空气密度等),推导出了固定翼无人机飞行的能耗公式,使得后续对无人机能效(能耗)问题的研究成为可能。文献[11-12]在文献[10]的基础上,通过联合优化圆形轨道半双工无人机中继的不同参数,实现无人机能效最大化。不同的是,前者主要考虑多天线半双工无人机中继的功率分配、波束形成及飞行速度,实现能效最大化。后者研究了不同源、目的节点距离下,半双工无人机中继的飞行速度、轨道半径,实现无人机中继能量效率和频谱效率最优化。文献[13]对放大转发模式下,无人机中继最优功率分配问题进行研究,提出了双跳无人机功率分配算法。文献[14]研究了螺旋翼无人机通信能耗问题,给出了螺旋翼无人机能耗公式。需要说明的是,与旋翼无人机相比,固定翼无人机更节能[15];在文献[14]的基础上,文献[16]对全双工无人机中继能效问题进行了研究,在固定轨道条件下对螺旋翼无人机的速度进行优化,使得系统能效最大化。文献[17]研究了不同飞行高度的无人机覆盖半径问题,给出了一种利用中断概率数值求解覆盖半径的方法。目前对于无人机中继能效问题的研究主要集中在螺旋翼无人机上,对于固定翼无人机研究较少,并且针对无人机变速运动的研究较少。
本文研究直线轨道下固定翼无人机中继系统的能效性能问题,针对采用时分双工(time-division duplex,TDD)模式和解码转发(decode-and-forword,DF)中继策略的无人机中继,在考虑无人机初、末速度及加速度约束的情况下,通过基于Dinkelbach 方法的迭代算法对无人机加速度进行求解,提出一种变加速无人机飞行方案并通过数值仿真验证算法的有效性。仿真结果表明,本文所提变加速飞行方案可明显提高远距离传输时,无人机中继系统的能量效率。
1 系统模型
图1 给出了本文研究的无人机移动中继系统模型。其中,地面节点S 需要将数据发送给地面节点D,假设S 与D 之间链路质量较差无法直接进行通信,数据只能通过中继R 进行传输。无人机飞行高度为H,以初速度v0从源节点S 正上方出发,沿直线飞向目的节点D,以末速度vF到达节点D 停止,实际情况中,v0和vF可以是无人机起飞(降落)时最小速度[10]。由于存在LOS,假设无人机通信系统的时变信道遵循自由空间路径衰落模型[7-12]。由于无人机工作在时分双工模式,假设无人机中继从S 点正上方到L/2 处从节点S 接收数据,从L/2 到节点D 发送数据。
假设无人机中继R 运动产生的多普勒效应能被完全消除[10-12],将节点S 到D 之间的距离L 分为2N 段,无人机在每一段内位置保持不变[18-20]。在第n段,无人机中继R 接收和发送的信号yR(n)或yD(n)可以表示为
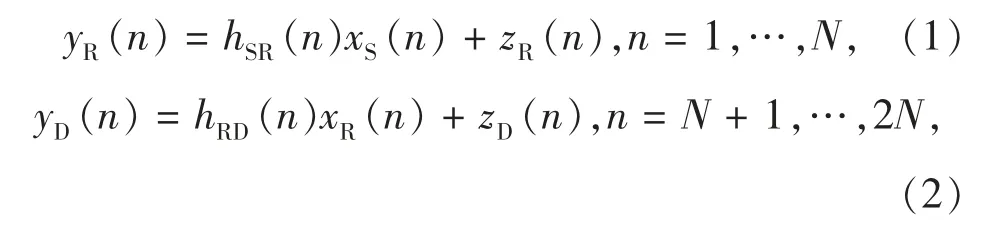
其中:xS(n)和xR(n)分别表示节点S、中继R 发送的信号;zR(n)和zD(n)表示R 和D 处均值为0,方差为σ2的高斯白噪声;hSR(n)和hRD(n)分别表示为S-R 链路和R-D 链路的信道增益,可表示为

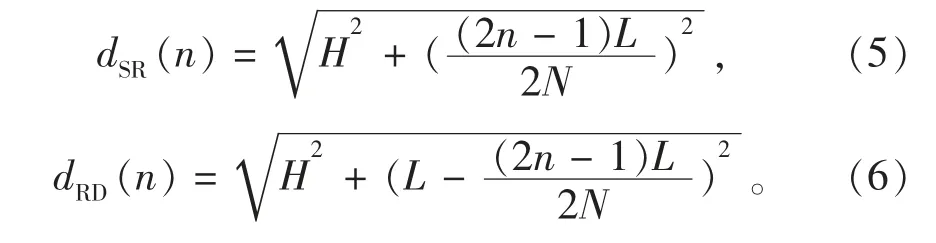
其中:α 表示信道衰落因子,一般取值2~4[3],由于无人机与地面节点之间的信道由LOS 构成,因此α 取2[15];β 表示单位距离的信道功率增益[17];dSR(n)和dRD(n)分别是源节点S 和目的节点D 到无人机中继R 的距离,假设无人机在每段路径中的位置是选取在每段的中点[11],即
假设地面节点S 和无人机中继R 的发射功率分别为PS和PR,此时S-R 和R-D 链路的瞬时信道容量RSR(n)和RRD(n)可写为
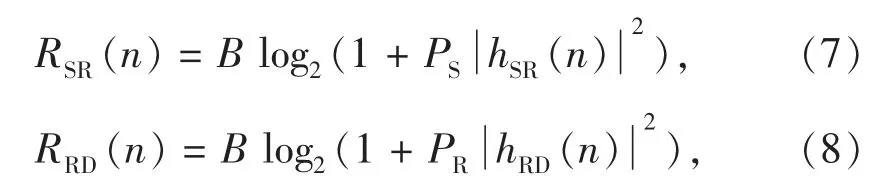
其中B 表示信道带宽。
无人机中继R 的总体能耗由无人机飞行所需要的能耗、无人机所携带的通信设备运行及无人机本身电路的静态能耗[10]组成。由于通信和静态电路部分的能耗远小于飞行能耗,本文仅考虑飞行部分能耗[10]。由文献[10]可得,固定翼无人机直线飞行能耗可表示为

其中:v(n)表示第n 段无人机的飞行速度;m 表示无人机的质量;c1和c2是无人机的空气动力常量参数,其值取决于空气密度、无人机的质量、机翼面积等;t(n)表示无人机通过第n 段所需的时间,与无人机第n 段速度、加速度a(n)有关,即

v0和vF表示无人机的初、末速度。假设v0=vF,则

2 能效优化问题的建立及求解
2.1 能效优化问题的建立
无人机中继从源节点S 接收到的总数据量和向目的节点D 发送的总数据量可分别表示为


由式(11)和式(14),无人机移动中继系统的能效

可通过优化无人机中继加速度实现无人机移动中继通信系统的能效最大化。该优化问题可描述为

其中:式(16b)表示无人机最大加速度的限制;式(16c)表示无人机最大、最小飞行速度的约束;v(n +1)表示第n+1 段无人机的初速度和第n 段的末速度,与第n 段的初速度v(n)和加速度a(n)有关;式(16e)表示无人机的初、末速度。
2.2 能效优化问题的求解
对于问题(16),可将其对无人机最优加速度的求解转化为对无人机第n 段最优速度的求解。根据速度-位移公式可得

同时,固定翼无人机飞行过程中存在最大(最小)飞行速度和最大加速度(减速度)的约束,因此,对于第n 段无人机的飞行速度,式(16b)—式(16e)可以转化为

当N →∞时,La(n)/N →0。式(10)可以通过等价无穷小公式转化为
由定理1 可知,在无人机中继数据缓冲区足够大的情况下,无人机一定是先从源节点S 接收信号,再向D 发送数据。且由于无人机中继吞吐量,因此对无人机移动中继系统最优能效问题的求解可以拆分为两个子问题:1)无人机中继R 从节点S 接收数据的最优能效问题;2)无人机中继R 向节点D 发送数据的最优能效问题。具体描述为


为了便于叙述,将问题(19)和(20)中的分子分母分别表示为fSR({v(n)})、gSR({v(n)})和fRD({v(n)})、gRD({v(n)})。问题(19)和问题(20)的最优解可以通过分数规划算法,如Dinkelbach 算法解得。假设存在

由于θ1为定值,问题(22)的最优值为凸优化问题,直接通过凸优化方法解得。利用解得的最优解更新θ1,通过迭代算法可以得到问题(19)的最优解,具体算法见算法1。

更新θ2,可以得到问题(20)的最优解,具体见算法2。

2.3 迭代算法
算法1问题(19)迭代算法
1)令l=0,初始化符合约束(19b)的{vl(n)}(以初速度v0匀速飞行为初值);
2)令l=l+1,n=2,vl(1)=v0,根据计算得出
3)根据式(17b)、(17c)和vl(n -1)计算得出vmin(n)和vmax(n),计算问题(22)得到vl(n);
4)令n=n+1,若n≤N,则重复步骤3),否则执行步骤5);
6)迭代结束,输出

算法2问题(20)迭代算法

令v*(2N+1)=vF,将解得的{v*(n)}带入式(17a)即可解得最优加速度{a*(n)}。
3 实验结果与分析
这一节将具体给出计算机数值仿真结果,以验证所提算法的有效性。在本文实验中,假设源节点S发射功率与无人机中继发射功率相等,即PS=PR=10 dBm;单位距离信道增益β=-50 dB;无人机中继R 处及目的节点D 处的噪声功率谱密度相同,即N0=-170 dBm/Hz。系统其余参数如表1 所示。

表1 数值仿真系统参数Tab.1 System parameters for numerical simulation
图2 给出了接收部分能效与迭代次数的关系曲线。在源、目的节点距离L=2 000 m,段数N=1 000 段条件下,经过4 次左右的迭代即可收敛,说明了算法1 的有效性。同时,图2 也给出了所取等价无穷小近似值和精确能效对比,在N 足够大的情况下,两者几乎一致,说明所取近似值的准确性。
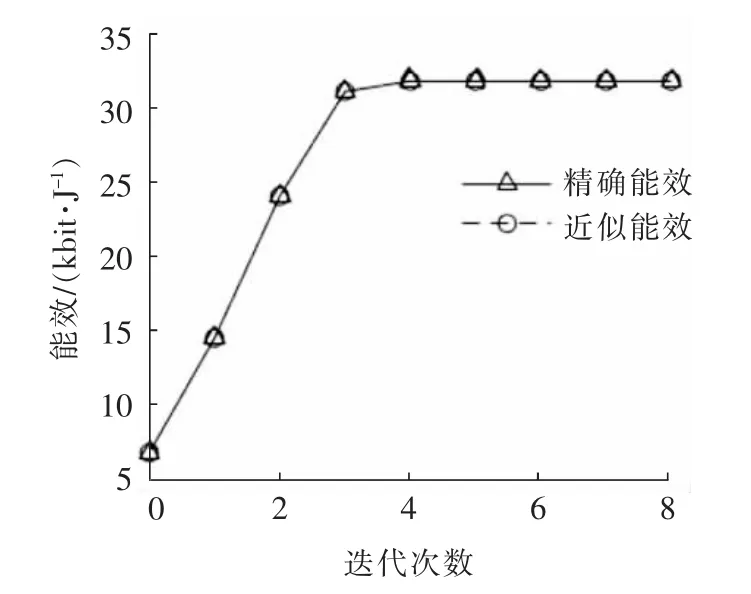
图2 算法1 收敛性及近似有效性Fig.2 Convergence behavior of the proposed Algorithm 1 and effectiveness of approximation
图3 给出了不同源、目的节点距离情况下,无人机移动中继的飞行速度。当距离L 比较小的情况下,无人机中继会持续以较大的加速度飞行,以获得更低的能耗;当距离较大时,无人机中继会在加速到一定速度后缓慢加速以获得更高的吞吐量。图3 说明本文所提算法可以根据源、目的节点的不同距离,动态地调整无人机的飞行速度,使系统获得更高的能效性能。
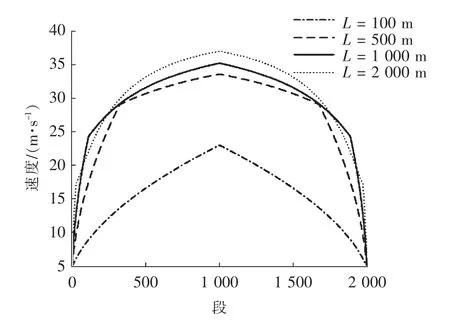
图3 N=2 000 段无人机飞行速度曲线图Fig.3 The speed of UAV at N=2 000
图4 给出了不同飞行方案下无人机中继能效与距离关系的曲线图。可以看出,无优化方案或是匀速飞行方案所取得的能效远低于本文所提变加速方案无人机中继所取得的能效。同时,匀加速优化方案在距离较小的情况下,能效与变加速优化方案相近,但随着距离的增大,变加速方案要明显优于匀加速方案。综上,本文所提无人机变加速联合优化飞行方案要明显优于其他传统匀速、匀变速飞行方案。随着距离L 的增加,该方案的能效优势更加明显,在面对中、远距离通信任务时,仍可以有较高的能效性能。

图4 不同飞行方案下无人机中继能效与距离关系曲线图Fig.4 Energy efficiency versus distance with different schemes
4 总结
本文研究了基于直线轨道固定高度无人机移动中继系统的能效性能。针对采用TDD 模式和DF策略的固定翼无人机中继,在初、末速度加速度约束下,给出了一种无人机加速度优化方案,以实现无人机移动中继系统能效最优化。对于无法直接求解的非凸原问题,将其转化为接收部分和发送部分两个子问题,并提出一种基于分数规划的迭代算法对其求解。研究发现,本文所提算法相较于传统无人机飞行方案具有更高的能效性能,且随着源、目的节点距离的增加,性能优势更加明显,说明本文所提算法在距离较远的情况下,可以灵活调整加速度,获得更高的能效性能;无人机移动中继能效性能是先随着距离增大而增大,后随着距离增加而减小的。