基于智能超表面的无人机通信联合波束赋形与航迹规划
2021-10-13郭雅婧章嘉懿
郭雅婧,孙 强,章嘉懿,艾 渤
(1.北京交通大学 电子信息工程学院,北京 100044;2.南通大学 信息科学技术学院,江苏 南通 226019;3.北京交通大学 轨道交通控制与安全国家重点实验室,北京 100044;4.中国移动通信集团山西有限公司,山西 太原 030032)
随着第5 代(5th generation,5G)无线网络的迅速发展及第6 代(6th generation,6G)无线网络“空-天-地-海”无处不在的无线连接愿景[1],基于无人机(unmanned aerial vehicle,UAV)的通信方式成为通信领域研究的热点之一[2-5]。根据不同的操纵机制,UAV 可分为固定翼式和旋翼式两种类型[6-7]。由于UAV 有效载荷重量的不断增大及通信设备的小型化,UAV 可在空中携带通信设备作为新的空中通信平台,为通信网络中的地面用户设备(user equipment,UE)提供或增强通信服务[8]。UAV 不仅在提高频谱效率方面发挥着越来越重要的作用[9],而且凭借着高机动性和灵活部署的特点,在交通控制、货运、搜索与救援、精准农业等商业和民用应用中也成为了极具优势的应用方案[10]。
一般来说,可以通过联合优化UAV 航迹和通信网络资源的方式,来提高UAV 与地面UE 之间的通信性能。这需要一种新的研究范例来研究其联合信号处理和性能优化。由于毫米波及更高频率的波易受到障碍物遮挡的影响且路径损耗大,因此不考虑经几次反射后的信号波束[11]。复杂的城市环境UAV 和地面UE 之间的视距链路可能会被遮挡,严重影响信道质量。作为改善信号传播环境提高系统通信质量的有效方式,智能超表面(reconfigurable intelligent surface,RIS)引起了国内外学术界和工业界的广泛关注,被认为是一种极具应用前景的绿色通信技术[12-15]。RIS 由大量可重新配置的无源反射元件组成,这些元件不仅成本低、能耗小而且支持高频段[16]。RIS 每个单元都可以对反射信号引入相移,通过协调设计所有单元的相移,实现来自不同传输路径的信号在接收机处的相位对齐,也称为无源波束赋形,从而提高系统频谱效率[17-19]。
结合UAV 在未来通信网络中的广泛应用前景与RIS 智能改变电波传播环境的特点,文献[20-22]针对RIS 辅助UAV 通信系统模式进行了研究。然而,目前针对RIS 辅助UAV 的通信系统还没有一种简单有效地提高系统频谱效率的方式。基于此,本文针对RIS 辅助UAV 与地面UE 通信的系统,在UAV 运动限制和RIS 的相移约束等条件下,以最大化系统频谱效率建立优化问题,联合设计无源波束赋形和UAV 飞行航迹。考虑优化问题的非凸性,本文采用交替优化的方式首先设计了RIS 单元的相移,以提高接收信号的功率;然后,使用禁忌搜索算法优化UAV 的飞行航迹,最终获得联合波束赋形和UAV 飞行航迹设计问题的局部最优解决方案。相比于传统方法,本方案的最大频谱效率可提高16%以上,且复杂度较低。
1 系统模型
如图1 所示,本文研究RIS 辅助UAV 的下行通信系统,包括1 架旋翼式UAV,1 个地面用户和1个安装在建筑物表面的RIS。此系统也可以扩展到更一般的场景。例如,在热点区域或周边基站通信流量过载的情况下,通过部署无人机和RIS 对通信流量进行分流,以提高地面用户的通信质量。将所有的通信节点都放置在3 维的笛卡尔坐标系中,地面用户的位置坐标为D=[xD,yD,zD],RIS 的位置坐标用R=[xR,yR,zR]表示,UAV 在ZU的固定高度飞行,其水平位置坐标表示为[xU,yU]。
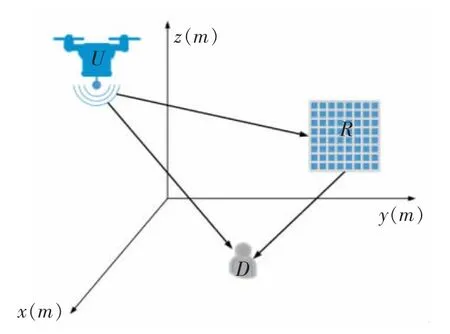
图1 系统模型示意图Fig.1 Schematic diagram of system model
UAV 上装有单个天线,RIS 由N 个单元构成并可实现连续的相移,辅助从UAV 到单天线用户的通信。信道模型采用稀疏的mmWave 信道。UAV到UE 的信道为hud,其中表示信道的大尺度衰落,φud是其相应的相移。相似地,UAV 到RIS 的确定性信道表示为hur,其中,hur=。从RIS 到UE 之间的信道用hrd表示,且。定义为RIS 的反射矩阵系数,其中,βi∈(0,1]表示幅度反射系数,θi∈[0,2π)是RIS 第i 个单元的相位偏移。由于每个RIS 单元的尺寸都小于波长,因此它们可以在所有目标方向上以近似恒定的增益对入射信号进行反射,且反射系数βi=1,∀i。在如图1 所示的系统模型中,时隙t 时刻用户接收到的信号为

其中:P 是UAV 的发射功率;s 是单位功率的信息信号;n 表示加性高斯白噪声。由式(1)可知,地面用户在时隙t 时刻接收到的信号信噪比为

相应t 时刻可系统实现的频谱效率(SE)为

2 问题建模
本文的目标是在UAV 飞行速度限制和RIS 相位偏移的限制下,通过联合优化RIS 处的相移矩阵Θ[t]与无人机的飞行航迹U[t]=[xU[t],yU[t],zU[t]],实现系统频谱效率的最大化。对应地,最大化SE 的问题(P1)为
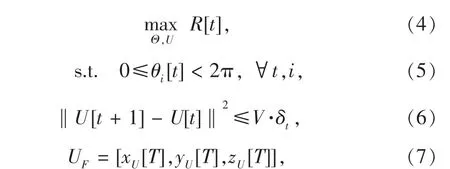
其中:θi[t]表示RIS 第i 个单元的相移;δt表示时隙长度,V·δt就是在1 个时隙内无人机可以水平移动的最大距离;T 表示UAV 总的飞行时间;UF是指定的UAV 飞行终点位置坐标。在优化问题(P1)中,尽管约束条件(5)、(6)是凸函数,但关于Θ 和U 的优化目标是非凸目标函数,仍然难以求得问题(P1)的最优解。
3 联合优化算法
在本节中,将联合优化问题(P1)分为无源波束赋形设计和UAV 航迹优化两个子问题,通过交替优化最终求得问题(P1)的最优解。
3.1 无源波束赋形设计
首先考虑对于任意UAV 飞行位置U[t]的RIS相移优化。UE 接收信号的信噪比满足


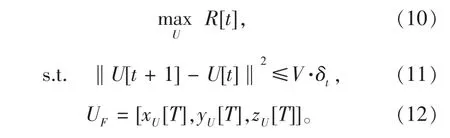
在RIS 最佳相移下,最大化SE 的问题即信噪比只与信道状态和UAV 的航迹位置有关,简化为(P2)
3.2 UAV 飞行航迹优化
问题(P2)对于UAV 的飞行航迹仍然是一个非凸优化问题。当UAV 在固定高度飞行时,UAV 的水平位置会对信道速率产生重要影响。为了找到优化问题的解,本文采用并改编了禁忌迭代搜索算法,来根据邻域的定义寻找问题的最优解。
禁忌算法首先从UAV 的初始位置向量开始,在其周围找到一个局部位置邻域,并在找到的邻域中选择最高速率值对应的位置向量。如果邻域值都比当前速率值低,也仍选择邻域中最优值对应的位置向量,然后,再生成新选定位置坐标的位置邻域,重复之前的步骤。禁忌算法通过允许选择次优值的方式,可以有效避免陷入局部最优值,在摆脱局部最优值影响的同时,找到全局最优解。当达到最大迭代次数时此算法停止。
下面给出禁忌搜索算法的相关要素:
邻域定义 当前位置坐标向量的邻域是以当前位置为圆心,单位时隙内最大飞行距离为半径的圆形区域内均匀分布的位置向量。
禁忌表 为了避免陷入局部最优状态,需要一个列表来记录已经访问过的位置向量,以防止搜索过程出现循环,确保搜索的有效性。禁忌表是大小为Ntabu× K 的矩阵。每行的K 个元素中存放被禁止的位置向量,Ntabu表示禁忌表移动的长度。它记录的是最近访问过的若干位置向量,并在Ntabu次迭代内禁止再次被访问,当迭代次数大于Ntabu时,被禁止的相应位置向量从禁忌表中被释放,又可以重新被访问。但是,如果在之后的过程中选择了从列表中删除的位置向量,则可以将其再次添加到禁忌列表中。
停止准则 当达到设定的最大迭代次数时,搜索迭代算法停止。
期望标准 对于禁忌搜索算法的每次搜索,用引入的变量b 来表示目前的最大SE,并在每次搜索后进行更新记录

其中U*表示最大信道速率对应的UAV 坐标向量。
基于禁忌搜索的UAV 飞行航迹优化步骤如下所示:
步骤1首先,基于UAV 的初始位置向量U0,即初始解,计算当前位置下的SE;
步骤2根据邻域的定义,生成上一轮迭代中最佳位置向量的邻域,然后计算邻域位置向量对应的SE 并以降序排序;
步骤3根据排序后的邻域SE 顺序,将第一候选向量用作下一次迭代搜索的初始解,且如果当前向量不在禁忌列表中则将其添加到禁忌列表中,将候选位置向量下的SE 与先前的最大SE 进行比较,当新的候选向量对应的SE 值大于b 时,更新b;
步骤4更新最佳位置向量,然后转到步骤2,直到达到最大的迭代次数。
算法1 给出了基于禁忌搜索算法的UAV 航迹优化方案。
算法1基于禁忌搜索算法的UAV 航迹优化方案
输入:禁忌表长度Ntabu,宽度K,最大迭代次数Niter,初始位置向量U0。
输出:每次迭代后的位置向量和相应的SE
1)基于UAV 的初始向量U0计算相应的SE;
2)While n≤Niterdo;
3)生成上一次迭代选择位置向量的邻域位置向量;
4)计算邻域位置向量对应的SE 并以降序排序;
5)选择最佳位置向量,并将其加入到禁忌列表中;
6)根据期望标准规制更新b;
7)n=n+1;
8)返回最佳位置向量;
9)end while。
本文采用的禁忌搜索算法是在无源波束赋形设计的同时,采用禁忌搜索算法优化UAV 的飞行航迹,并最终飞回到指定终点处。在下一节中通过仿真结果证明联合RIS 无源波束赋形和无人机飞行航迹优化算法的有效性,并与以下的基准算法进行比较:1)直飞方式是在采用无源波束赋形设计的情况下,无人机从起始位置U0开始沿直线飞行到指定终点位置UF处;2)启发式算法是在采用无源波束赋形设计的情况下,无人机首先以最大速度直接飞到地面用户所在位置的上方,并在此位置停留尽可能长的时间,最后飞回到指定终点位置UF处。3 种UAV 航迹算法的对比如表1 所示。
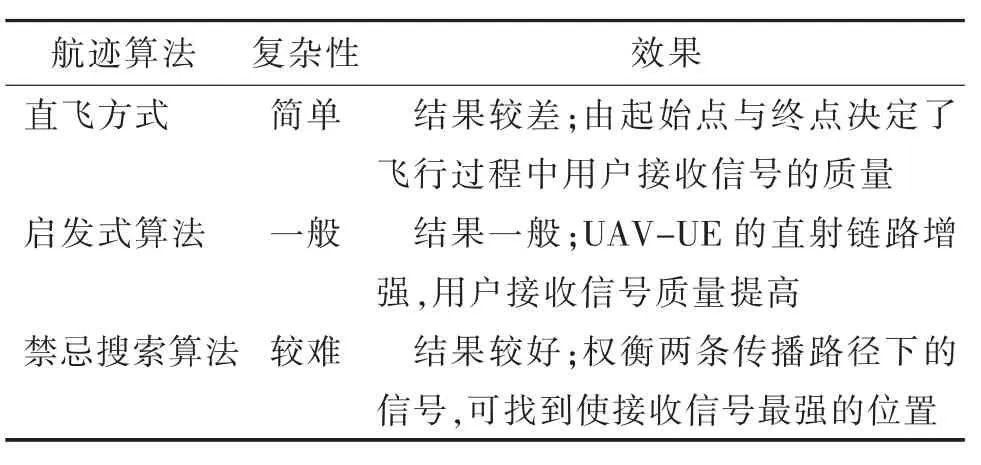
表1 UAV 航迹算法对比Tab.1 UAV trajectory algorithm comparison
4 仿真结果与分析
以UAV 初始时刻所在位置为原点建立参考坐标系,为验证算法的有效性将其余参数设置为:具有64 个反射单元的RIS 元件位置坐标为R=[20,20,6],地面用户的位置坐标为D=[10,10,1],UAV 在ZU=60 的固定高度飞行,最大飞行速度为vmax=2.5 m/s,每时隙时长0.2 s,最后飞行到的位置为UF=[0,50,60],发射功率P=3 W,噪声功率σ2=80 dB。
图2 说明了联合优化算法与其他基准算法的不同。当有足够的飞行时间时,UAV 可以自由地改变其位置,并将更多的时间停留在频谱效率更高的位置上,以实现频谱效率的提高。因此,本文设置了足够大的时间间隔来观察所有飞行航迹算法下的性能变化。由仿真结果可以看出,所提出的联合优化算法的平均频谱效率超过了其他算法。UAV 飞行航迹的禁忌搜索优化方案可先于直飞方式和启发式飞行方案找到更好的UAV 位置,如在第25 个飞行时隙下禁忌搜索方案的最大频谱效率与直飞方案和启发式方案相比分别提高了28%和16%。禁忌搜索算法优于另外两种基准算法的原因是禁忌搜索算法可以在每个时隙中平衡UAV-UE 链路和UAV-RIS-UE 链路之间的信道增益来选择飞行航迹,从而达到最佳的频谱效率。这也是禁忌搜索算法下的飞行航迹及其悬停位置与基准算法不同的原因,图3 所示即为不同航迹优化算法下的UAV飞行航迹。

图2 不同UAV 航迹下的频谱效率曲线图Fig.2 Spectrum efficiency under different UAV trajectories
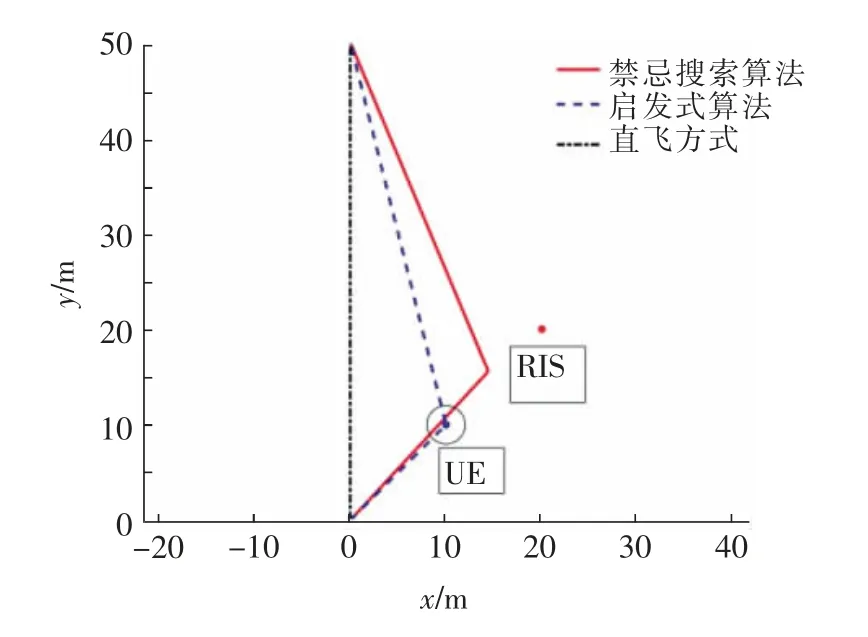
图3 不同算法下的UAV 飞行航迹Fig.3 UAV flight path under different algorithms
图4 是在RIS 具有不同单元数的情况下,可实现的系统频谱效率。由仿真结果可以看出,当RIS具有越多的单元时系统可实现的频谱效率越高,且联合优化算法的优越性也越明显。这是因为,当RIS 具有的单元数越多时,可使反射波束更加准确地指向接收用户,提高用户的接收信噪比,因此,RIS 具有的单元数越多,其在影响频谱效率的因素中占据的权重越大,在优化算法下获得的增益提升越明显。
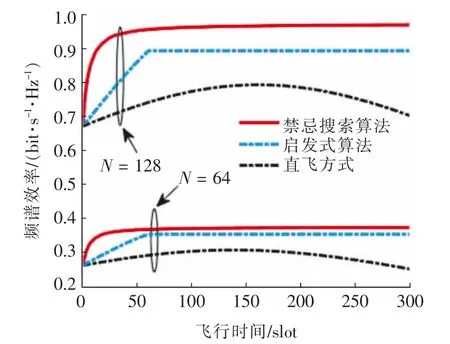
图4 不同RIS 单元数下的频谱效率曲线图Fig.4 Spectral efficiency under different numbers of RIS elements
图5 是在RIS 具有64 个反射单元的情况下,不同航迹优化算法在给定不同飞行时长下的平均吞吐量。由仿真结果可以看出,在禁忌搜索与启发式航迹优化下,系统平均吞吐量随着飞行时间的增加而增大,而直飞方式则无明显变化。这是由于飞行时间增加时,采用航迹优化算法UAV 可将更长的时间停留在较优位置,而直飞方式飞行轨迹固定无法因系统性能而调整飞行航迹。由此可以看出,对UAV 飞行航迹进行优化是必要的,尤其在时间较长时航迹优化可带来的性能提高。对比UAV 直飞算法在有RIS 辅助和无RIS 辅助两种场景下平均吞吐量可以看出,采用RIS 辅助原有通信系统的方式有利于提高通信系统的通信性能。

图5 不同航迹规划在不同飞行时间及场景下的平均吞吐量Fig.5 Average throughput of different trajectory in different flight time and scenarios
5 结论
本文应用RIS 辅助UAV 与地面UE 通信的模式,实现了地面UE 接收信号的增强。为了最大化系统频谱效率,本文采用联合优化算法交替优化RIS无源波束赋形与UAV 飞行航迹,最终获得局部最优的解决方案。仿真结果表明,本文采用的联合算法可有效提高系统频谱效率,表明RIS 的辅助有利于提高UAV 通信网络的通信质量。本文研究了单天线的场景,所采用禁忌算法仅与UAV 和用户的物理位置关系有关,未来可扩展到多天线场景,且在实际的RIS 离散相移下,会造成系统性能的下降。现假设信道信息完美,在此条件下可以获得系统的最佳性能,但在实际系统中得到的信道信息是不完美的,此时需要提高信道估计的准确度来提升系统的性能,这都将是未来考虑的研究方向。