双率Hammerstein 系统的极大似然递推辨识
2021-10-13李俊红张佳丽陆国平
李俊红,张佳丽,陆国平
(南通大学 电气工程学院,江苏 南通 226019)
在系统辨识领域,选择的对象一般是具有相同输入输出采样周期的离散时间系统,也就是单率采样系统[1-3],目前大多数的研究也是针对单率系统进行辨识的[4-5]。然而,由于硬件条件的限制,在许多实际的工业生产过程中,特别是在很多化工系统中,许多变量只能在部分采样点测得实验数据,这导致了系统的信息缺失,造成采样的频率不一致。因此,当两个不同采样频率的数据出现在同一个控制系统中时,相应的系统称为双率系统[6-7]。
受控制系统物理条件限制,工业生产中有大量的双率系统,如反应器发酵过程[8]和石油开采[9]等。随着科学技术的发展,双率采样系统逐渐应用于网络系统、信号处理等过程。双率采样系统的辨识与控制已成为研究的热点[10-11]。
双率系统辨识的难点在于系统的信息向量中包含不可测时刻的信息[12-13]。在双率系统辨识领域,常用的辨识方法是多项式变换技术[14-15]和提升技术[16]。通过多项式变换技术,转换后的新模型中只包含可测的系统变量,然而,这种方法的缺点是增加了未知参数,从而增加了计算量。
辅助模型辨识是一种新型辨识方法,其思想是用可测信息建立辅助模型,用辅助模型的输出代替系统未知变量[17-19]。辅助模型辨识方法已经被成功应用于多变量系统、双线性系统以及多率系统的辨识[20-22]。极大似然辨识是一种效果显著的参数辨识方法,它是基于概率论的参数估计方法。由于其良好的统计特性,极大似然估计被广泛用于许多工业领域中[23-25]。
本文采用辅助模型辨识方法和极大似然原理,研究了双率Hammerstein(dual-rate Hammersetin,DR-H)系统的参数辨识问题,提出了基于辅助模型的极大似然递推辨识算法。与多项式变换方法相比,该算法能够直接辨识出未知参数,因此计算量大大减少。
1 问题描述
考虑如图1 所示的DR-H 系统,其中μ(k)和y(k)分别是系统的输入和输出,可测得的数据为{μ(k),y(gk)}(g 是双率采样的间隔,g≥2),v(k)是服从N(0,σ2)的高斯白噪声信号,ω(k)是作用于输出的有色噪声,x(k)是没有噪声作用时的输出,中间变量和ω(k)是不可测的。系统描述如图1 所示。
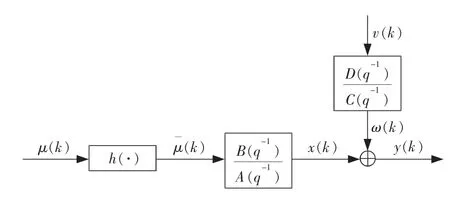
图1 DR-H 系统示意图Fig.1 Schematic diagram of DR-H system
系统的输出可以表示为

其中A(q-1)、B(q-1)、C(q-1)和D(q-1)都是关于q-1的多项式[26],且满足如下形式:

Hammerstein 系统的非线性部分输出是系数(γ1,γ2,…,γm)的已知非线性基(h1,h2,…,hm)的线性组合[27],即

定义系统的参数向量为:
其中,假设参数向量的阶次na,nb,nc,nd,m 均已知[28],且μ(0)=0,y(0)=0。
系统的非线性子系统的输出可以表示为
中间变量x(k)和ω(k)可以写作:
定义参数向量ϑ,θ 和信息向量φ(k)、ψ(k)和φ(k)为:

将式(6)中的k 用gk 代替可得DR-H 系统的模型描述
其中,双率系统的信息向量为:

由于模型(7)中的输出y(gk)比输入μ(k)采样慢,中间存在缺失的输出数据,所以双率采样数据不能被模型(7)直接使用。为了能直接使用双率采样数据,利用辅助模型进行辨识,具有辅助模型的DR-H 系统如图2 所示。其中G(q-1)是系统模型的传递函数,Ga(q-1)是一个辅助模型,xa(k)表示辅助模型的输出,可以得到

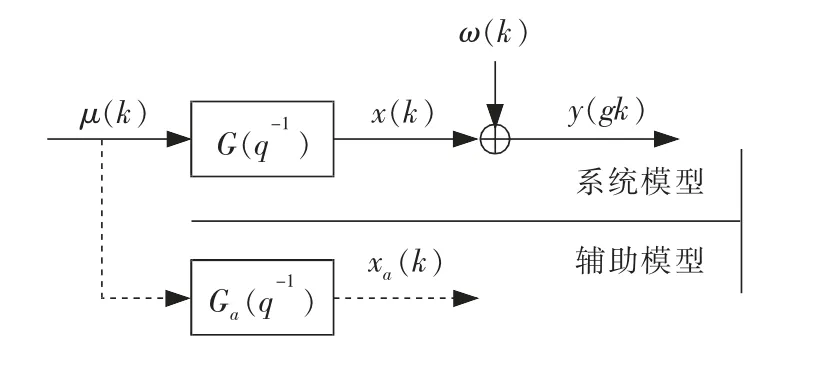
图2 具有辅助模型的DR-H 系统Fig.2 DR-H system with auxiliary model
在辨识过程中,xa(k)表示无噪声输出x(k)的估计值,辅助模型Ga(q-1)是G(q-1)的估计。基于此辅助模型,提出基于辅助模型的极大似然递推最小二乘辨识算法来直接估计模型(7)中的参数。
2 基于辅助模型的极大似然递推辨识算法
在本节中,针对DR-H 系统推导基于辅助模型的极大似然递推最小二乘算法(maximum likelihood recursive least squares algorithm based on auxiliary model,ML-RLS-AM)。选取准则函数如下:

下面推导极大似然估计算法。令gk 时刻θ,ϑ,a,b,c,d,γ 的估计如下:




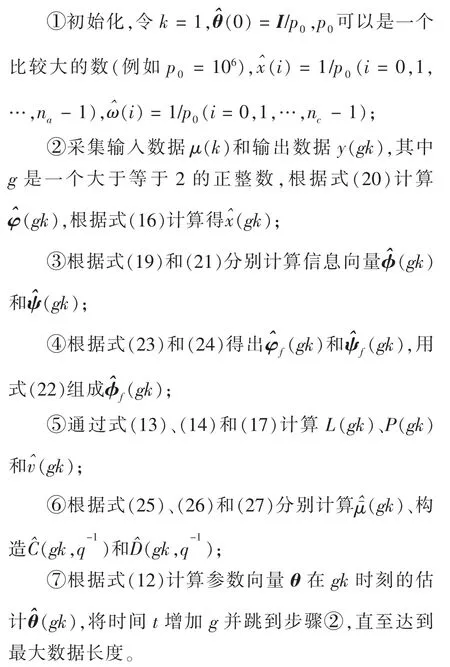
用于辨识DR-H 系统的ML-RLS-AM 算法流程图如图3 所示,算法步骤如下:

图3 针对DR-H 系统的ML-RLS-AM 算法流程图Fig.3 Flow chart of ML-RLS-AM algorithm for DR-H system
3 仿真实验
考虑如下的双率Hammersetin 系统,其中双率采样的间隔g=2,


参数向量定义如下:

系统的真实参数向量如下:

对于本次仿真,输入{μ(k)}是一个不相关的零均值单位方差的持续信号序列,{v(k)}是方差σ2=0.502的零均值白噪声信号。模型的参数估计误差的计算方法如下:

采用ML-RLS-AM 算法辨识DR-H 系统,系统的参数估计及其误差分别见表1 和图4。从表1 和图4 可以看出,参数估计误差随着k 的增加而减小,最终误差趋于1%左右。仿真结果证实了算法的有效性。

图4 ML-RLS-AM 算法估计误差δ 随k 变化的曲线(σ2=0.502)Fig.4 ML-RLS-AM algorithm estimation error δ versus k(σ2=0.502)
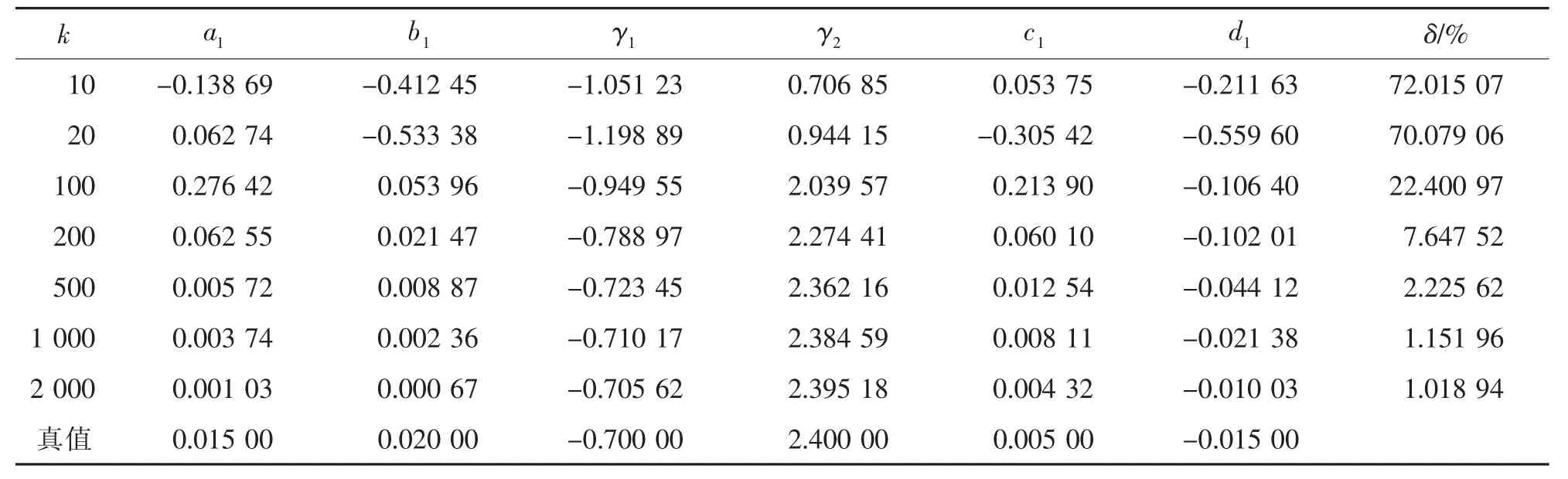
表1 ML-RLS-AM 算法估计及误差(σ2=0.502)Tab.1 ML-RLS-AM algorithm estimation and error(σ2=0.502)
4 结论
本文基于辅助模型辨识思想,利用极大似然原理和递推辨识技术,研究了DR-H 系统的参数辨识问题。与多项式变换方法相比,所提出的算法能够直接对系统的参数进行辨识,算法的计算量大大减少。仿真结果表明该算法具有较好的辨识效果。