格洛纳斯卫星导航系统的发展历程及其现代化计划
2021-10-13陈鹏
陈 鹏
(交通运输部天津海事测绘中心,天津 300222)
0 引言
1959 年9 月17 日,美国在佛罗里达州卡纳维拉尔角的大西洋导弹靶场,用索尔-埃布尔(Thor-Able)三级火箭,将美国海军卫星导航系统(U.S. navy navigation satellite system, NNSS)第一颗导航卫星Transit-1A 送入轨道[1],开启了星基导航的历史。由于NNSS 的导航卫星沿地球子午圈的轨道运行,因此,NNSS 又称为子午仪卫星导航系统(Transit navigation satellite system, Transit)[2]。苏联科学家为了给在海上航行的海军舰艇及在水下航行的弹道导弹潜艇提供导航服务,也于1963 年启动了一个基于空间卫星进行导航的研发项目(research and development, R&D),该项目称为苏联第一代低轨卫星导航系统即齐克隆卫星导航系统(Tsiklon satellite navigation system, Tsiklon),1967 年5 月15 日,苏联发射了Tsiklon 系统的第一颗导航试验卫星,到1978 年7 月27 日发射Tsiklon 系统最后一颗试验卫星科斯莫斯(Cosmos)1027,苏联共发射了29 颗Tsiklon 导航试验试验卫星;在完成了一系列试验卫星的发射后,苏联于1974 年12 月26 日开始发射Tsiklon 系统的工作卫星,称为Tsiklon-B 系统,Tsiklon-B 系统亦称为帕鲁斯卫星导航系统(Parus satellite navigation system, Parus),从1974 年12 月26 日至2003 年6 月4 日,苏联及后来的俄罗斯共发射了92 颗Parus卫星,Parus 系统于1976 年为苏联海军的潜艇及军舰提供导航定位服务,Parus 系统为苏联的绝密卫星导航系统[3]。为了满足民用导航需求,苏联在建造Tsiklon 系统的同时,也同时建造了民用的齐卡达卫星导航系统(Tsikada satellite navigation system, Tsikada)[4],并于1976 年12 月15 日发射了第一颗苏联民用导航卫星科斯莫斯883 号(Cosmos-192)[5],开启全球第二个民用全球卫星导航系统(global navigation satellite system,GNSS)的建设征程。Tsikada 是俄语“Цикада”的英文读音,其意义为蝉(Cicada),因此,Tsikada 亦称为“蝉”导航系统(Cicada navigation system, Cicada)。1979 年,Cicada 系统正式向用户提供服务。
为了能够检测到救援无线电定位信标发射的求救信号,在Cicada 系统的导航卫星上,安装了能够接收救援信号的接收机,这种具有接收救援信号载荷的卫星称为娜杰日达卫星导航系统(Nadezhda satellite navigation system, Nadezhda)[4]。当Nadezhda 导航卫星接收到求救信号后,会将其发送到专用地面接收站,地面站上的接收机就可以计算出求救信号的位置,从而实现对遇险人员的救援。无线电定位信标、Nadezhda 卫星及地面站,构成了苏联的卫星搜救系统科斯帕斯(Cospas),Cospas 与美国-法国-加拿大搜救卫星服务(search and rescue satellite-aided tracking, Sarsat)一起,建成了一个全球卫星搜救系统科斯帕斯-萨尔萨特(Cospas-Sarsat),Cospas-Sarsat 已经挽救了数千人的生命。
为了能够为用户提供全天候、全天时的导航定位服务,从20 世纪70 年代中期起,苏联就开始研究格洛纳斯卫星导航系统(global navigation satellite system, GLONASS)的建设方案,1982 年10月12 日,苏联发射了第一颗 GLONASS 导航卫星,到1996 年初,建成了由24 颗第一代GLONASS 导航卫星组成的GNSS,可以在全球范围为苏联军方提供全天时、全天候的导航定位服务。
苏联于1991 年12 月25 日解体,俄罗斯继承了GLONASS 的所有权。由于第一代GLONASS 卫星的寿命为3 年,每年需要进行两次发射才能维持24 颗卫星构成的完整星座。但是,解体前的苏联及接替苏联的俄罗斯,在1989—1999 年间发生了经济危机,受经济危机的影响,它们用于空间计划的资金减少了80%。在经济危机的状态下,俄罗斯无力按照一年两次的速度发射GLONASS 导航卫星,致使在轨的GLONASS 导航卫星逐年减少,特别是从1996 年到1999 年12 月,俄罗斯一直未发射新的GLONASS 导航卫星。随着第一代GLONASS 导航卫星的3 年寿命到期,到2001 年,GLONASS 仅仅有7 颗在轨卫星可以正常使用。2000 年代初,在弗拉基米尔·普京(Vladimir Putin)担任俄罗斯总统期间,俄罗斯的经济开始复苏,而且普京总统本人也支持GLONASS 的更新计划。2003 年12 月10 日,俄罗斯发射了新设计的第二代GLONASS 导航卫星GLONASS-M,2007 年5月18 日,俄罗斯宣布将精度为10 m 的GLONASS导航信号对全世界民用用户开放[6-7]。
从2011 年开始,GLONASS 开始了现代化的工作,于2011 年1 月26 日发射了GLONASS-K1卫星,但由于各种原因,GLONASS 的现代化工作一直未按照计划如期发射现代化的导航卫星GLONASS-K2。
1 苏联第一代卫星导航系统的定位原理
苏联的Tsiklon 系统、Tsikada 系统、Parus 系统及Nadezhda 系统都属于苏联第一代卫星导航系统,虽然其构成导航星座的卫星数量不一致,但其定位原理都是依据多普勒频移原理来实现定位的,文献[8]以火车汽笛的频率时间特性为例,论述了多普勒频移的定位原理,如图1 所示。
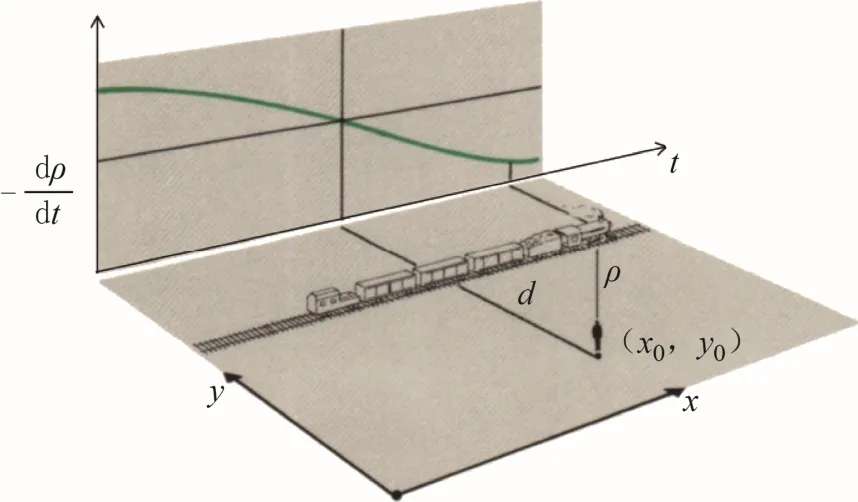
图1 多普勒频移示意[8]
假定火车运行的铁轨为x轴,垂直于铁轨的方向为y轴,接收机(此处为观察者)位于 (x0,y0)处,信号源(此处为火车汽笛)的坐标为(x,y),则信号源与接收机之间的距离[8]为

如果将火车铁轨换成导航卫星的轨道,将火车的汽笛换成导航卫星上发送的导航信号,则图1 就成为了利用多普勒频移来定位的原理图。设在导航卫星上的发射装置以频率fs发射导航信号,则接收机测得导航信号的频率fr为

从图1 可以看出,当信号源靠近接收机时,多普勒频移Δf为负;当信号源远离接收机时,多普勒频移Δf为正。多普勒频移Δf的变化率为

当然,式(7)仅仅是采用多普勒频移计算接收机位置最为简单的说明,对于采用导航卫星轨道参数及多普勒频移计算接收机位置的三维坐标更为详细的论述,有兴趣的读者可以仔细阅读文献[8]。
2 苏联第二代卫星导航系统
无论是军用的Parus 系统,还是民用的Tsikada系统,苏联第一代卫星导航系统都存在以下缺点:1)导航卫星都处于1 000 km 高度的中低轨道,易受大气阻力和地球重力变化的影响,使得实时确定导航卫星的轨道参数变得特别困难,严重地影响了用户的定位精度;2)导航卫星的个数较少,例如Parus 系统仅有6 颗导航卫星,Tsikada系统也仅有4 颗卫星,这使得地面接收机需要等待很长时间才能够接收到导航卫星的导航信号,满足不了用户实时导航定位的需求。为了解决这些问题,苏联于1982 年10 月12 日发射了第一颗GLONASS 导航卫星,开启了建设苏联第二代卫星导航系统的建设步伐。GLONASS 亦称为乌拉根(Uragan),是俄语“飓风(Ураган)”的意思。
与美国全球定位系统(global positioning system, GPS)的定位原理相似,GLONASS 也由空间段、控制段及用户段构成,其定位原理可以参阅文献[9],这里仅介绍GLONASS 的特点。
GLONASS 的星座由运行在3 个轨道平面的24 颗导航卫星组成,每个轨道面上等间隔地分布着8 颗导航卫星,这些导航卫星位于地球上19 100 km的高空,其轨道倾斜角为64.8°,绕地球的运行周期为11 h 15 min 44 s。
与GPS 通过不同的伪随机码来区分卫星的码分多址(code division multiple access, CDMA)调制方式不同,早期的GLONASS 卫星采用频分多址(frequency division multiple access, FDMA)调制方式,即把相同的伪随机码调制到不同频率的载波上,GLONASS 卫星 L1、L2 频段载波信号频率[10]分别为
式中:n为GLONASS 卫星在发射导航信号时采用的频道号,n=- 7, -6,…, 5, 6;fL1、fL2分别为L1、L2 频段载波信号的中心频率; ΔfL1、ΔfL2分别为L1、L2 频段载波信号的频率间隔,其值分别为fL1=1 602 MHz、 ΔfL1=562. 5 kHz;fL2=1 246 MHz、ΔfL2=437.5 kHz。
为了实现与其他 GNSS 互操作,俄罗斯于2011 年2 月26 日发射了GLONASS-K1 卫星,在GLONASS-K1 卫星的L3 频段上增加了CDMA 信号[11],表1 列出了至2021 年5 月8 日,发射的GLONASS 卫星的主要技术参数。表1 中:SF(secured FDMA signal)为加密的 FDMA 信号;OF(open FDMA signal)为公开的FDMA 信号;SC(secured CDMA signal)为加密的 CDMA 信号;OC(open CDMA signal)为公开的CDMA 信号。商用接收机可以接收各个频段上的公开信号,加密信号仅供俄罗斯军方使用。
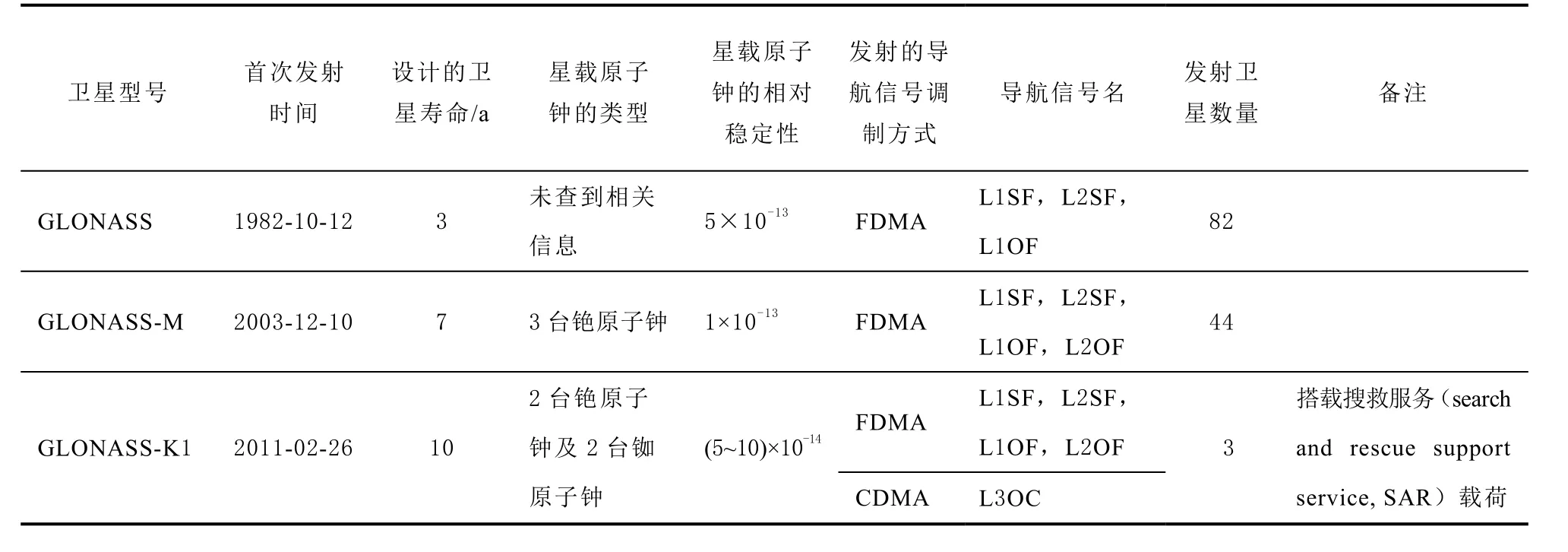
表1 GLONASS 卫星的主要技术参数[11-13]
3 格洛纳斯卫星导航系统的现代化计划
虽然早在1996 年,GLONASS 就建成了由24 颗导航卫星组成的GNSS,但当时GLONASS 存在致命的缺陷:1)由于缺少能够接收GLONASS导航信号的兼容硬件,使其GLONASS 无法在民用行业发挥作用;2)俄罗斯在20 世纪90 年代,采取了削减军费开支、军工企业军转为民用企业等政策,使俄罗斯军队未有足够的资金来购买能够接收GLONASS 信号的接收机,致使俄罗斯军队在1994—1996 年的第一次车臣战役中,俄罗斯国防部甚至需要从外国购买了民用GPS 接收机供参战部队使用,俄罗斯空军的许多参战飞行员,甚至会自费购买民用GPS 接收机,供他们在战斗飞行期间为自己的战机导航[14]。
由于第一代 GLONASS 导航卫星的可靠性不高,出现故障的几率非常高,而且也缺乏备份卫星进行替换,导致1996 年建成的、具有24 颗导航卫星的星座很快崩溃,到 2001 年,GLONASS 只有7 颗在轨工作卫星,这7 颗导航卫星无法为全球用户提供全覆盖、全天时的导航定位服务,实际上这7 颗导航卫星也不能够为俄罗斯本土的用户提供全天时、全覆盖的导航定位服务,即使在GLONASS 能够提供服务时,其定位精度比GPS 低一个数量级,这时的GLONASS 成为了一个毫无用处的摆设,动摇了俄罗斯在卫星导航领域的大国地位[14]。
为了尽快恢复俄罗斯在卫星导航领域的话语权,俄罗斯政府于2002 年启动了一项名为“全球导航系统(2002—2011 年)”的联邦计划。该计划的目标是全面恢复与促进包括空间段、控制段及用户段在内的、所有涉及GLONASS 的软硬件的发展。到2011 年12 月,GLONASS 再次拥有了24 颗在轨运行的导航卫星,满足了覆盖全球、可以为用户提供全天时服务的GNSS。GLONASS 也正式交付给俄罗斯国防部进行试运行[14]。
为了巩固俄罗斯在卫星导航领域里取得的成果,俄罗斯政府于2012 年启动了“2012—2020 年GLONASS 的维护、开发和使用”联邦计划,文献[15]曾经指出,俄罗斯将在2013—2014 年间发射现代化的导航卫星GLONASS-K2,但到写作本文时(2021 年5 月29 日),俄罗斯仍然没有发射现代化的导航卫星 GLONASS-K2,表 2 列出GLONASS-K2 的主要技术指标。

表2 GLONASS-K2 的主要技术参数[15-17]
GLONASS 空间段的现代化计划[17]为:1)使用机载软件及星间链路(inter-satellite link, ISL)来提高卫星轨道参数及钟差数据的更新速率;2)校准不同信号、不同频率间及不同通道间的数据延迟;3)研发新的导航信号L1OCM、L5OCM;4)研发新一代星载铷原子钟、铯原子钟和氢原子钟子钟。
GLONASS 地面控制段的现代化计划[17]为:1)更新数据处理软件,以提高卫星轨道及钟差数据处理精度;2)部署全球性地面测控站,进一步提高导航卫星的轨道参数的精度,地面测控站将布设在俄罗斯本土,赤道区域及南极地区;3)在俄罗斯境内增加数据注入站的个数。
4 结束语
GLONASS 的发展历程清晰地告诉我们,星基导航系统作为一个国家重要的基础设施,只有将军用与民用市场相结合,才能够促进星基导航系统的良性发展;也只有与其他国家的GNSS 实现信号兼容与互操作,才能够扩大用户群,促进本国GNSS 的发展。
