基于模糊PID的纺织整纬机运动控制方法
2021-10-12王婷杨军王波张鹏
王婷 杨军 王波 张鹏

摘 要:为了进一步优化纺织整纬机在多工况、大惯性下的精确作业能力,本文基于模糊PID控制算法研究其运动控制方法,包括数据采集、系统辨识、控制设计、软件在环(SIL)测试及硬件在环(HIL)测试的五个步骤。控制设计中的核心技术是模糊控制算法,具体包括:模糊化、模糊规则、模糊推理、清晰化四步。软件在环及硬件在环测试表明本文方法的适应性与稳定性更高。
关键词:模糊PID;运动控制;纺织整纬机;SIL测试;HIL测试
纺织整纬机是纺织机械中用于纠正纬线的机器,具体而言:在加工布料时,整纬机能够自动检测纬纱的倾斜角度及方向,有效纠正织物在生产过程中产生的纬斜、纬弧,提高织物质量。整纬机的运动控制技术是其核心技术。传统运动控制方法常采用PID控制算法,然而随着整纬机结构系统复杂多变,在不同工况下具有不同的系统传递函数,所述不同工况指辊子的转速变化以及布料的宽度、软硬程度变化等不同工作状况,以及整纬机的结构系统惯性较大,很难达到快速的响应,导致传统的PID控制算法很难适应多工况、大惯性下的运动控制要求,仍然需要进一步改进。模糊PID控制作为一种非线性控制技术,无须精确知道系统模型,既有系统化的理论,又有实际应用案例,能够根据外界的扰动变化实时优化PID控制参数,可应用于整纬机的实时运动控制。
1 纺织整纬机控制系统及原理
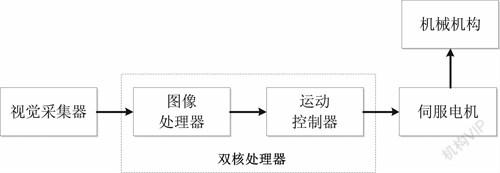
本文整纬机运动控制系统包括视觉采集器、控制器和执行机构,其中控制器包括图像处理模块和运动控制模块;执行机构包括伺服电机和通过伺服电机驱动的机械结构;视觉采集器和伺服电机均与控制器电连接。执行机构的机械结构包括皮带减速传动机构、丝杆和通过螺纹连接套设在丝杆上的弯辊拨杆。皮带减速传动机构包括小带轮、大带轮和转动皮带。丝杠通过轴承与整纬机转动连接,伺服电机固定安装在控制箱中,其输出轴与小带轮固定连接,丝杆的一端大带轮固定连接,小带轮和大带轮通过传动皮带连接,丝杆上的执行部件为整纬机的弯辊拨杆。
整纬机运动控制系统原理如图1所示为:
图1 整纬机运动控制系统硬件示意图
(1)视觉采集器实时采集整纬机输出端的布料图像,并将采集的布料图像发送给控制器的图像处理模块;
(2)图像处理模块对布料图像进行图像处理,得到布料的角度偏差信息作为运动控制对象,并传送给运动控制模块;
(3)运动控制模块器接收到角度偏差信息后,计算得到角度偏差的变化率,基于模糊PID控制算法对角度偏差及其变化率进行闭环反馈控制,计算得到伺服电机转动的方向、速度与位置信息,并通过内部集成的运动控制电路将计算得到的伺服电机转动的方向、速度与位置信息发送至伺服电机;
(4)伺服电机开始转动,并带动机械结构运动,具体而言驱动丝杆转动,带动弯辊拨杆沿丝杆运动,进而控制布料的运动方向。通过设置小带轮和大带轮,起到减速的作用。
2 纺织整纬机控制方案
采取以下流程开发方法进行纺织机运动控制研究,包括数据采集、系统辨识、控制设计、虚拟测试及实机测试的五个步骤。具体而言:
(1)通过智能硬件对控制系统的数据进行获取;
(2)依据获得数据,采用系统辨识方法获取系统的动态特性模型[1];
(3)根据系统的动态特性模型,采用模糊PID控制算法进行PID参数整定;
(4)采用软件在环(SIL)的测试方法进行虚拟测试,本文采用Matlab/Simulink环境进行虚拟仿真[2];
(5)采用定制的负载设备来仿真实机负载,基于硬件在环(HIL)的测试方法进行深度测试[3]。
3 模糊PID控制原理
3.1 模糊控制
模糊控制是应对无法表达的复杂系统而产生的控制策略,它是根据专家的经验总结出来的条件语句并制订出相应的控制规则,目前在很多工业领域中应用广泛。模糊控制器的结构图如图2所示,e表示实际值与系统设定值之间的偏差,作为模糊控制系统的输入值,u表示经过模糊控制器控制之后的输出值,此为一维模糊控制器,若将实际值与系统设定值偏差的变化率也作为系统输入量,则为二维模糊控制器。本文采用二维模糊控制器。
模糊控制器主要包含四个步骤:模糊化、模糊规则库、模糊推理以及清晰化[4]。首先,通过模糊化模块将输入值进行模糊化处理,转换成系统可识别的模糊语言变量,根据实际情况选取合适的论域和相应的隶属度函数。然后,根据专家的经验建立模糊规则库,编写相应的模糊规则语句。进而,根据模糊控制规则对对模糊输入值进行模糊推理,获得模糊控制量。最后,进行清晰化步骤,即采用一系列的规则将模糊控制量变换成输出量,又称去模糊化。以上四步不断循环,得到控制量优化值。
3.2 模糊PID控制原理
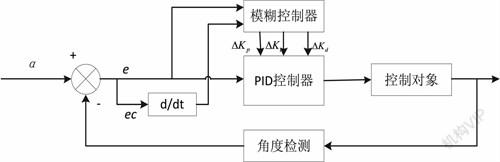
传统PID控制算法的控制参数是恒定的,适用于稳定不变的控制系统,对时变、扰动系统控制效果不佳。模糊PID控制算法即在传统PID控制的基础上引入模糊算法,能够根据现场情况对控制系统参数进行自适应实时调整,提高系统控制精度。该算法有效地利用了模糊控制和PID控制的优点,其结构包括模糊控制器和PID控制器两部分,如图3所示。
由图3可以看出,模糊PID控制算法是将输入量经过模糊化处理,并通过模糊控制器输出PID控制器的参数变化量(ΔKp、ΔKi、ΔKd),与PID控制器的控制参数相加得到更新的PID控制参数,实现PID参数的实时调整优化。
4 模糊PID控制器设计
4.1 模糊语言变量
本文模糊PID控制器采用布料的角度偏差e及其变化率ec作为闭环反馈控制的输入量来动态调整运动控制系统的PID参数,从而达到适应性强、稳定性高的目的。采用七个词集对输入量(e、ec)和控制輸出量(ΔKp、ΔKi、ΔKd)进行描述,分别是PB、PM、PS、Z、NS、NM、NB,各子集中的元素依次代表正大、正中、正小、零、负小、负中、负大。
