基于协同A*算法的多无人机航迹规划∗
2021-10-11牛佳伟
牛佳伟
(武汉数字工程研究所 武汉 430074)
1 引言
当今现代战争中,战场随着科学技术的发展而趋于复杂多变的状态,从而导致战争成本的提升以及飞行员自身安全也都比过去受到更大的威胁[1~4]。无人机低成本,高灵活性,良好的隐身性能等特点逐渐被发觉,无人机替代人完成任务的作战理念应运而生。
随着人工智能的发展,解决航迹规划的算法也应运而生。例如,Voronoi图法[5],蚁群算法[6],遗传算法[7]等。A*算法作为启发式信息的人工智能算法代表,由于其搜索精度高,搜索速度快等特点,所以被广为使用[8~9]。本文选用A*算法为航迹规划的基础算法,针对算法中估计函数导致航迹不稳定的情况进行稳定性优化。
2 航迹空间的模型构建
假设航迹规划空间大小为60km×60km。坐标轴中X表示水平方向,Y表示竖直方向。将横纵坐标轴进行60等分,每个探索点(ai,bi)表示为无人机的航迹搜索点(0≤i≤60)。本文主要考虑雷达威胁,及禁飞区的条件约束。使用矩形表示禁飞区域;实心圆表示敌方雷达侦测,圆心为雷达所在位置,半径为雷达威力范围。如图1所示。
无人机攻击方式为低空突防突防,其起点为(ax,ay),目标点为(bx,by),而其航迹规划的主要任务就是将无人机从起始点开始,寻找最佳的路径,保证航行轨迹与圆形和矩形不相交。
对于图1中的主要威胁和约束主要存在于雷达和禁飞区。雷达主要影响无人机安全;禁飞区主要影响航程,综合考虑设置无人机航迹代价函数如下:

图1 航迹空间模型

其中k1,k2表示代价权重系数;i表示航路点,di表示i到i+1的距离,d的计算公式如式(1)。wi表示航迹点代价,l表示雷达探测半径,计算如式(2):
3 无人机航迹规划算法
作为启发式函数的一种,A*算法的评价函数为

其中k1为真实代价加权,k2为估计代价加权。G(A)表示从最初节点到当前节点A的代价;H(A)表示从当前节点A到目标节点的代价。F(A)就是通过A点到达终点的代价估计值。通过判断代价函数值得大小来进行节点选择,选择节点代价最小的作为下一节点。图2为节点选择。其中子节点为1,父节点为0。

图2 A*算法节点选择
3.1 算法改进
在算法中评价函数的计算里,常用的计算方式为欧几里德启发式函:

本文改变对角线距离来计算启发式函数,在尽量减少计算时间的基础上精确地算出估计函数。通过使用曼哈顿距离和斜线步数结合完成算法优化。
在曼哈顿距离中,置到临近点的最小代价为A,式(6)为曼哈顿距离启发函数:


3.2 交汇时间设置
为达到同时到达目标点的目的,设计一个交汇时间来对系统中每一个无人机平台进行航迹评估。对于整个系统来讲,交汇时间将对各个无人机的飞行轨迹和飞行速度进行分析,从而满足航迹规划里多方面代价总和最小的要求[10~11]。无人机的航迹规划受其速度影响,在给定步长时,设置无人机的速度范围为[vmin,vmax]。在实际过程从中考虑到目标是否为移动型目标,当为移动目标时,需要补上目标移动对时间集合Si的影响时间;Li为第i个无人机飞行步长;Ts-i为第i个无人机进入战场环境的起始时间;Tm为目标移动所产生的时间。求出i个无人机对应的时间集合为Si∈[tmin,tmax]取时间集合交集。由式(9)得:

对每个无人机的时间集合Si取交集。若交集不为空集,则取代价函数最小的时间作为协同规划的时间。如不存在交集,则重新设置各个无人机的步长大小,从而改变交汇时间。在进行多无人机航迹规划仿真时假定每架无人机平台都存在交汇时间有效集合[12]。多无人机协同航迹规划运行如图3。
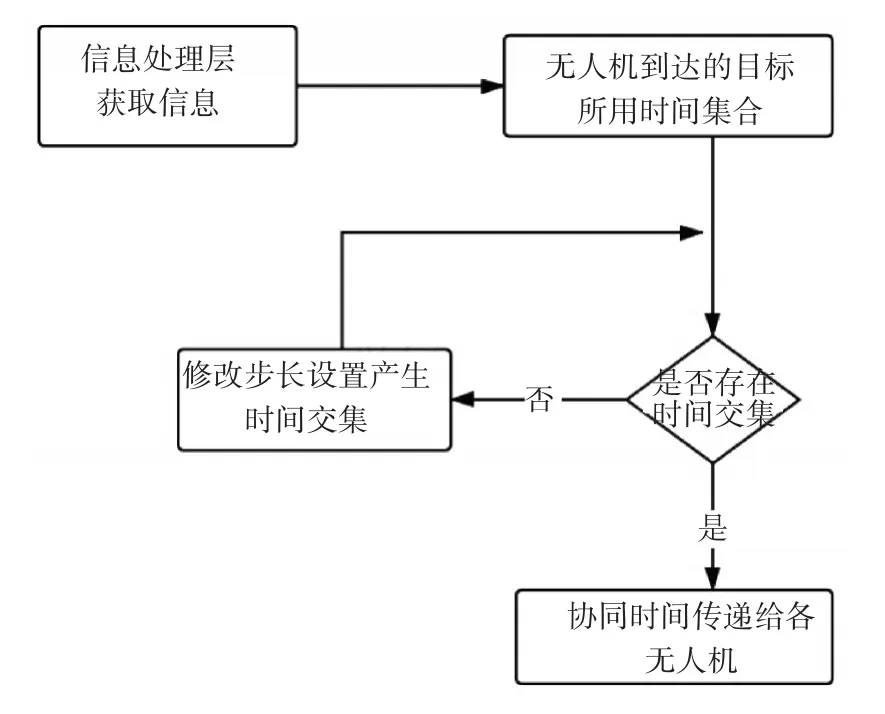
图3 整体运行过程
4 仿真实验
仿真环境为MatlabR2017a,采用了模拟地形和模拟威胁。战场规划区域大小为60km×60km,由雷达威胁区域,禁闭飞区组成。设置两架无人机平台初始位置分别为 Spoint=(10,10),Spoint=(30,60),目标坐标点Epoint=(57,10)。禁飞区上部和下部分别为(1,30)(16,23),(40,50)(20,40),雷达威胁区域中心(9,15),(38,15)。信息处理层已给出准确威胁信息准确位置,而其存在时间有效集合。按照其有效航迹步长l=1km规划航迹,成功规避威胁后,以相同速度,经过73s后达到目标点。在使用欧几里德距离获取启式函数H时,既出在航迹后半部分出现了较明显的错位现象如图4。
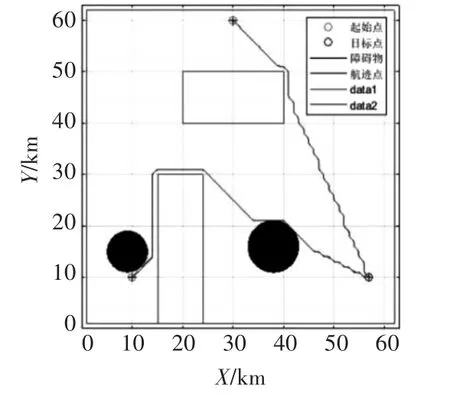
图4 欧几里德距离计算H结果
而在使用改进对角线距离启发式函数时,错位现象明显降低,图形更加符合无人机实际运动方式,满足航迹平滑处理要求。经过航迹平滑处理,航路光滑无尖角,且符合无人机转弯半径要求。如图5。
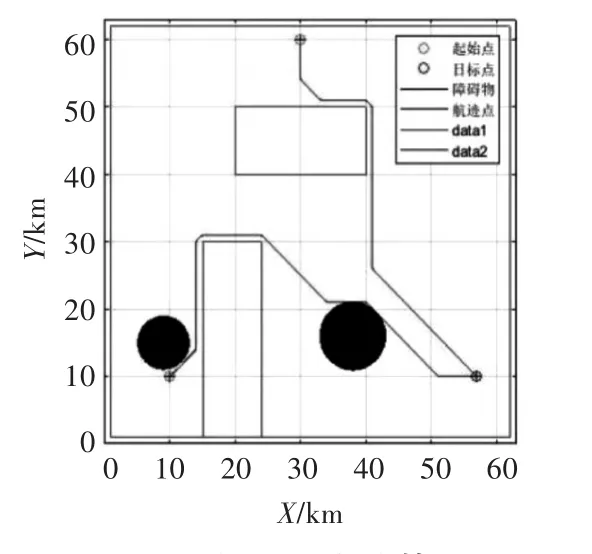
图5 改进对角线距离计算H结果
5 结语
本文构建了较为精确的二维航迹规划模型。在A*算法的基础上改进估计函数的计算方法,并且在多无人机平台方面加入交汇时间策略。仿真结果表明,增加交汇时间策略,可以有效地实现多无人机航迹规划。通过优化A*算法减少了航迹抖动的现象,经过航迹平滑处理,航迹光滑无尖角,具有更好的航迹效果。
