基于MMC的虚拟同步发电机技术在船舶与岸电无缝并网中的应用
2021-10-08解文祥周昊郭燚王超
解文祥 周昊 郭燚 王超

摘要:鉴于船舶与岸电在并网时存在较大冲击电流,以及模块化多电平换流器(modular multilevel converter,MMC)控制的岸电离网运行时对突发状况响应速度较慢的问题,采用改进的虚拟同步发电机(virtual synchronous generator, VSG)技術结合模型预测控制(model predictive control, MPC)算法,对岸电电源输出电流、环流、子模块电容电压进行分层预测控制,实现船舶与岸电的无缝并网。采用MATLAB/Simulink建立MMC-VSG并网仿真模型,模拟船舶与岸电并网及突加负载等工况。对所提出的控制策略和算法的有效性进行验证,结果表明,利用所提出的控制策略能实现VSG离网与并网的无缝切换;与经典控制方法相比,所提出的控制策略的动态响应速度提升了5倍。
关键词: 船舶; 岸电; 虚拟同步发电机(VSG); 模型预测控制(MPC); 模块化多电平换流器(MMC); 无缝切换
中图分类号: U665.12
文献标志码: A
收稿日期: 2020-08-20
修回日期: 2021-02-01
基金项目: 上海市科技计划(20040501200);上海市科学技术委员会项目(19040501700)
作者简介:
解文祥(1993—),男,安徽六安人,硕士研究生,研究方向为船舶中压直流电力系统,(E-mail)2602247213@qq.com;
周昊(1987—),男,上海人,工程师,研究方向为船舶工程、海洋工程、工程管理、项目管理、财务管理,(E-mail)zhou704@163.com;
郭燚(1971—),男,安徽安庆人,副教授,博士,研究方向为船舶电力推进系统、船舶中压直流电力系统,
(E-mail)yiguo@shmtu.edu.cn
Application of MMC-based virtual synchronous generator technology
in seamless grid-connection of ships and shore power
XIE Wenxiang1, ZHOU Hao2, GUO Yi1, WANG Chao1
(1.Logistics Engineering College, Shanghai Maritime University, Shanghai 201306, China;
2.No.704 Research Institute, China Shipbuilding Industry Corporation, Shanghai 200031, China)
Abstract: There exist the large impulse current when a ship connects to shore power, and the slow response speed to emergencies when shore power is in off-grid operation (where shore power is controlled by the modular multilevel converter
(MMC)). To solve the problems, the improved virtual synchronous generator (VSG) technology and the model predictive control (MPC) algorithm are adopted to carry out the hierarchical predictive control of the output current, the circulating current and the sub module capacitor voltage of shore power supply, so as to realize seamless grid-connection of ships and shore power. By MATLAB/Simulink, the MMC-VSG grid-connection simulation model is built to simulate the working conditions such as the grid-connection of ships and shore power and the sudden loading. The effectiveness verification results of the proposed control strategy and algorithm show that the proposed control strategy can achieve seamless switching between VSG off-grid and grid-connection, and the dynamic response speed of the proposed control strategy is 5 times faster than that of the classical control method.
Key words: ship; shore power; virtual synchronous generator (VSG); model predictive control (MPC); modular multilevel converter (MMC); seamless switching
0 引 言
船舶靠港时停止所有的船舶柴油机运转,使用陆地电源供电,可有效降低港区污染废气的排放[1]。目前常用的岸电与船电的切换方式主要有两种,即离网切换和并网切换[2]。离网切换必须先停止船电再接入岸电或先断开岸电再开启船电。为保证船舶供电的连续性与稳定性[3],岸电与船电的切换通常采用无间断式并网切换[4]。由于岸电电源与柴油发电机两者的特性不同,若仍对岸电电源逆变器侧采用常规的下垂控制策略[5],则
很难让两者并网,且并网逆变器系统很可能因下垂系数设计不当
而不稳定[6]。虚拟同步发电机(virtual synchronous generator,VSG)具有同步发电机的外特性[7],能够弥补传统控制策略的缺点,实现电网的调压、调频、均匀分布功率等功能。在中高压柔性直流输电系统中,模块化多电平换流器(modular multilevel converter,MMC)因其可扩展性强、导通损耗低、对滤波器要求较低等特点已得到了广泛应用。当前已有许多有关VSG的研究:文献[8]提出一种VSG控制策略,并在不同电网条件下进行测试,实验结果表明VSG可以很好地模拟传统同步发电机的部分特性;文献[9]通过分析发现基于MMC的VSG(MMC-VSG)模型确实显现出与同步发电机模型类似的功角特性,并用实验验证了MMC与VSG结合的可行性及优势;文献[10]建立了基于VSG的船舶无缝并网仿真模型,并着重研究了实现船舶无缝并网与离网的岸电电源控制策略;文献[11]提出了基于虚拟阻抗的预同步控制,但由于只将桥臂输出电压与电网同步,未考虑LC滤波器的存在导致桥臂输出电压与滤波后电压存在相位偏差,采用这种方法同步效果较差。文献[12]提出了MMC-VSG控制技术,使MMC在进行能量变换的同时兼具对中高压系统频率和电压的支撑能力,但其采用传统的电压-电流双闭环控制,系统的动态响应慢,且并非应用于船舶岸电的并网上。
针对上述问题,本文建立MMC-VSG船舶并网仿真模型,通过仿真验证该模型的可行性。结合改进的模型预测控制(model predictive control,MPC)[13]算法对输出电流、环流、子模块电容电压进行分层预测控制,进一步研究MMC-VSG模型在并网与离网切换及突加负载等工况下的性能,并验证所提出的控制策略与算法的有效性。
1 基于MPC的MMC-VSG控制方案
MMC僅可简单模拟同步发电机下垂特性,忽略了同步发电机所具有的阻尼特性和励磁控制环节[14]。为解决这些问题,钟庆昌[15]提出同步逆变器(synchronverter),其能够模拟同步发电机转动惯量、阻尼特性、下垂特性、励磁特性,实现电网的调压、调频、均匀分布功率等功能。
基于MPC的MMC-VSG岸电电源拓扑结构如图1所示。为便于分析,本文将岸电电源整流侧等效为恒压源Udc,着重分析采用VSG技术的逆变侧。主电路采用LC滤波的MMC,LS为滤波电感,C为滤波电容,ZS为线路的等效阻抗;PCC表示并网继电器。控制方法为:①在主电路测量采集机端三相输出电压uabc、电流iabc以及船电三相电压值ug,abc;②将采集所得数据通过幅值计算得到输出电压幅值Um,通过功率计算得到有功功率Pe和无功功率Q,通过预同步控制得到同步电压Usyn、同步角频率ωsyn;③结合有功功率和无功功率设定参考值,通过VSG控制环节得到电流给定值iref;④根据电流给定值,MMC内部电压、电流值,采集所得电压、电流值,通过MPC算法得出下一时刻的电压、电流值,并通过计算得到使输出电流控制目标函数J1取得最小值,且不平衡电流抑制目标函数J2在J1取最小值的基础上取相对最小值的一组开关状态,以此控制驱动MMC子模块的投切。
2 VSG控制策略
2.1 功频控制器设计
VSG功频控制通过转子运动方程和原动机调节方程实现,同步发电机转子运动方程[16]为
Jdωdt=
Tm-Te-Td=
(Pm-Pe)/ω0-D(ω-ω0)
dδdt=ω-ω0
(1)
式中:Tm为原动机提供的机械转矩;Te为同步发电机的电磁转矩;Td为阻尼转矩;Pm和Pe分别为机械功率和电磁功率;J为转动惯量;ω为实际角频率;ω0为额定角频率,本文取ω0=100π;D为常阻尼系数;δ为功角。
为使岸电电源能够根据有功功率变化对系统频率作调整,需引入下垂控制关系:
Pm=Pref+Dp(ω0-ω)
(2)
式中:Pref为VSG额定有功功率设定值;Dp为有功频率下垂系数[17]。
根据式(1)和(2)设计功频控制框图如图2所示。岸电系统实时检测船舶电网频率,结合VSG的额定有功功率设定值,根据计算偏差对输出频率进行相应的调整,给出岸电电源相位角指令。
2.2 励磁控制器设计
实际船舶电网中,任意时刻系统的无功功率都处于平衡状态,即任意时刻任意电压水平下无功电源所产生的总的无功功率都等于系统总的无功功率。系统的无功输出与电压呈负相关关系,VSG给定输出电压Uref表达式为
Uref=UN+Kq(Qref-Q)
(3)
式中:Qref为无功功率预设的额定值;Q为岸电电源实际的无功功率;Kq为无功电压下垂系数;
UN为系统设定的额定电压幅值。
当Q波动偏离Qref时,通过计算将Uref与实际并网反馈电压幅值Um比较,
再经过PI控制器得到励磁电动势的幅值Ue,实现对并网电压的闭环控制[18]。幅值与无功功率控制框图见图3。
2.3 预同步控制设计
岸电电源与船电并网时要求并网电源输出电压的相位、频率、幅值一致,以减小并网时的电磁和机械冲击。通过预同步并网技术,调节变换器输出电压的幅值和相位与网侧电压同步可有效解决冲击电流问题。频率为相位的微分,因此当相位满足条件时,频率也可以实现无差跟踪。
图4a为相位预同步过程矢量图,电网电压ug与d轴重合,设相位为θg,角频率为ωg。逆变器端输出电压为u,相位为θ,角频率为ω,Δθ为电网电压与逆变器电压的相位差。当逆变器由离网状态切换到并网运行状态时,通过调节逆变器输出电压的角频率可以达到使两者的电压相位相同的目的。由图4a可知,通过控制uq=0可使电网电压与逆变器输出电压的相位一致。
设计基于双锁相环的电压、相位预同步单元如图4b所示。其中,PLL采用MATLAB自带的PLL模块,最小频率为45 Hz,初始输入相位为0°,频率为50 Hz,调节器增益Ka,p=180、Ka,i=3 200、Ka,d=1,最大频率变化率为12 Hz/s;PI控制器参数为比例系数Kc,p=0.1,积分系数Kc,i=1。三相船舶电网电压ug,abc经过abc-dq坐标变换得到两相旋转坐标系下的电压ug,d和ug,q,将其q轴分量ug,q与0参考值做比较,再经过PI调节器得到预同步角频率信号ωsyn,最后将该信号送入VSG功频调节器中,得出输出相位θ。电压幅值同步流程为:将坐标变换所得ug,d和ug,q经过幅值计算得到电网电压的幅值Um,同时以其为给定值与反馈值机端输出电压幅值Um比较,再将比较结果进行PI调节,最后PI调节器的输出Usyn补偿给VSG的无功功率环的电压给定值,使逆变器输出电压幅值跟踪电网电压幅值。值得注意的是,坐标变换使用的参考相位为机端三相输出电压相位,而非由VSG的功频控制器生成,与传统的预同步方法[19]相比,对由LC滤波器所导致的相位偏差进行自适应补偿,可以消除并网瞬间的电流冲击,实现岸电输出电压与船舶电网电压的完全同步。
LC滤波器的截止频率应在基波频率的10倍以上,本文中输出基波频率为50 Hz。在确定截止频率后即可根据式(4)和(5)计算出滤波电感LS和滤波电容C的取值,本文取LS=80 mH,C=47.5 μF。
LS=U0ω2LI0ω20+ω2L
(4)
C=I0U0ω2L+ω20
(5)
式中:ωL為截止角频率;U0为输出相电压有效值;I0为输出相电流有效值。
3 MMC逆变侧MPC策略
3.1 MMC交流侧电流数学模型
三相MMC的单相等效电路[20]如图5所示,其中:
uj(j=a,b,c)为网侧电压;l和r分别为线路等效电感和等效电阻;L和R分别为桥臂电感和桥臂等效电阻;ip,j和in,j分别为j相上桥臂和下桥臂电流;up,j和un,j分别为j相上桥臂和下桥臂电压;idiff,j(j=a,b,c)为j相内部不平衡电流。
由图5得MMC的电压方程:
uj+rij+ldijdt=un,j-up,j2-L2
dijdt-R2ij
(6)
令
ej=(un,j-up,j)/2
L′=L/2+l
R′=r+R/2
(7)
称ej为MMC的虚拟电动势,L′为等效电感,R′为等效电阻。式(6)可简化为
L′dijdt=ej-uj-Rij
(8)
对交流侧电流采用欧拉公式离散化得
ij(t+T)=
TRT+L′ej(t+T)-uj(t+T)+L′Tij(t)
(9)
式中,T为采样周期。当T足够小时,可近似认为uj(t+T)=uj(t)。
设交流侧参考电流为iref,j(t+T),若对MMC的输出电流进行预测控制,则目标函数定义为
J1=iref,j(t+T)-ij(t+T)
(10)
对于N+1电平输出的MMC来说,每相所有开关状态的组合为22N,若以开关状态的可用组合进行预测计算则计算量极大。对输出电压电平进行预测控制,使输出电平数量恒为N+1,MPC的计算量能够大大降低。
设MMC上、下桥臂各有N个子模块,则上、下桥臂参考电压分别为
ep,j=Ni=0UdcNSp,j,i
en,j=Ni=0UdcNSn,j,i
(11)
式中:Sp,j,i和Sn,j,i分别表示上桥臂和下桥臂第i个子模块的导通状态。当子模块投入使用时,Sp,j,i和Sn,j,i的值为1;当子模块切除时,Sp,j,i和Sn,j,i的值为0。故逆变器的输出电压参考值e*j可写为
e*j=e*n,j-e*p,j2=Udc2N(Kn-Kp)
Kn+Kp=N
(12)
式中:Kp和Kn分别表示上桥臂和下桥臂子模块导通数,Kp,Kn=0,1,…,N。由式(12)可知,在对输出电流进行预测计算时仅需计算N+1种状态。
3.2 MMC环流数学模型
三相MMC中的相间环流,虽然不影响输出电流波形,但是会叠加在桥臂电流上,增加开关器件的负荷,并使系统能量产生一定的损耗,因此在保证输出电流稳定的情况下,对系统的环流进行抑制[21]。
由图5可得
idiff,j=(ip,j+in,j)/2
Udc2=Ridiff,j+Ldidiff,jdt+ep,j+en,j2
(13)
通过欧拉公式离散化得MMC内部不平衡电流预测模型:
idiff,j(t+T)=2TRT+L′Udc(t+T)+LTidiff,j(t)-
e*n,j(t+T)-e*p,j(t+T)
(14)
结合输出电流的预测结果,分别从上、下桥臂取出一个子模块用于不平衡电流的预测控制:
idiff,j(t+T)=2TRT+L′Udc(
t+T)+LTidiff,j(t)-
e*n,j(t+T)+Udiff,j-
e*p,j(t+T)+Udiff,j
Udiff,j=Kdiff,jUdcN
(15)
式中:Kdiff,j为抑制不平衡电流的上、下桥臂导通子模块数,Kdiff,j=-1, 0, 1。ej由上、下桥臂电压差决定,因此上、下桥臂同时加上相同的Udiff,j对MMC的输出电流没有影响。
式(14)可化简为
idiff,j(t+T)=2TRT+L′Udc+LTidiff,j(t)-
UdcN(Kp+Kn+2Kdiff,j)
(16)
式中:Kp+Kn=N-1;Kp,Kn=0,1,…,N-1。
设icir,j为环流
,idiff,j=idc/3+icir,j,则对MMC环流进行控制的目标函数为
J2=idc(t+T)/3-idiff,j(t+T)
(17)
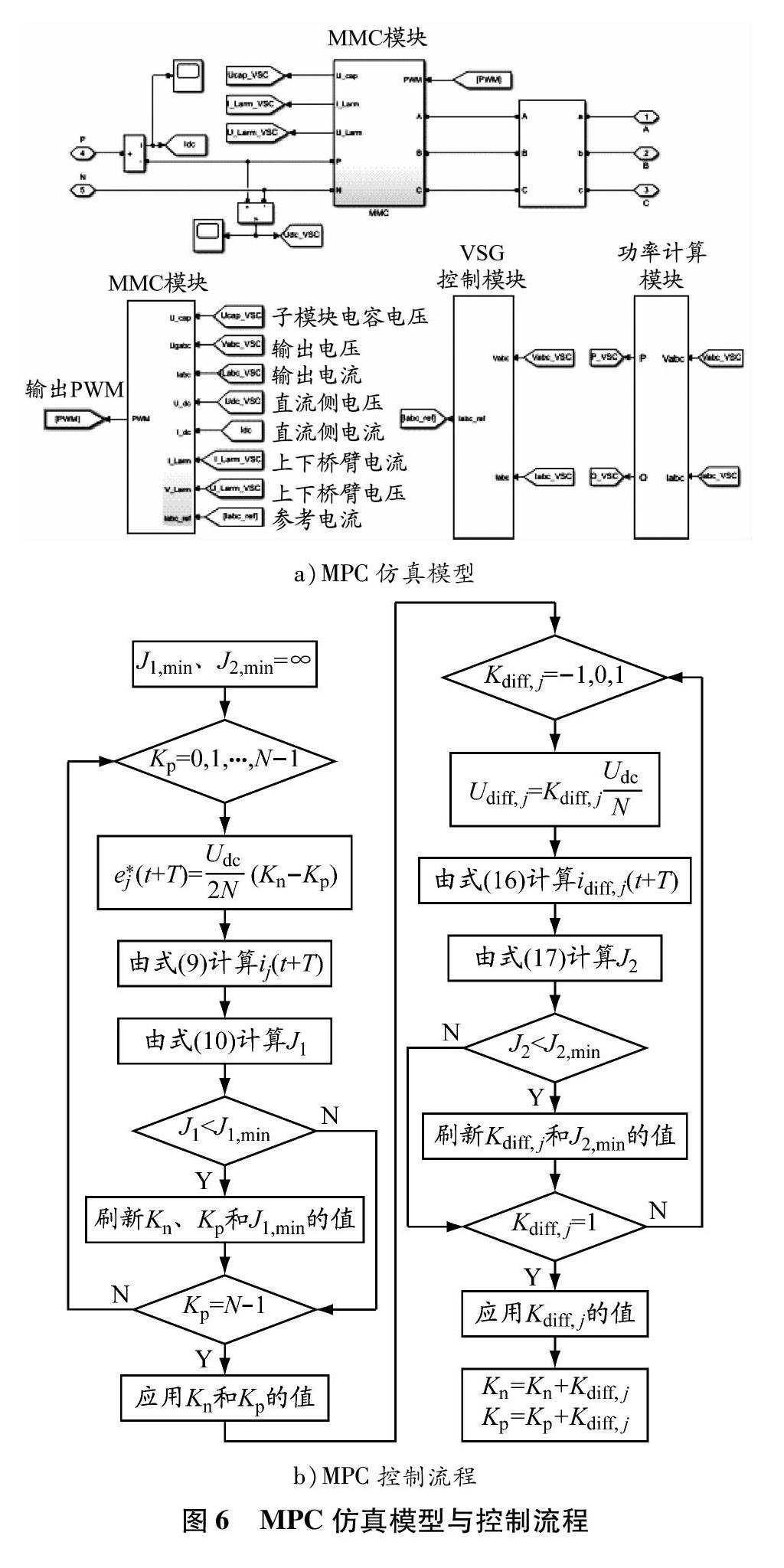
图6为MPC仿真模型以及系统交流侧输出电流和环流的MPC策略的详细控制流程。
如图6a将MMC上、下桥臂的电压、电流以及子模块电容电压导入MPC算法中,根据式(12)逐个计算子模块不同的导通数所对应的逆变器输出电压参考值,将其代入式(9)计算出每种情况下的下一时刻交流输出电流值,再将ij(t+T)与VSG控制环节得到的电流给定值iref做比较,取目标函数J1,根据J1最小情况下的上、下子模块导通数Kp、Kn控制子模块导通,即可达到使逆变器输出理想电流的效果。
考虑到MMC内部环流的存在,结合输出电流的预测控制结果,分别从上、下桥臂取出一个子模块用于不平衡电流的预测控制。根据式(16)计算Kdiff,j分别取-1、0、1时MMC内部不平衡电流的大小,再通过式(17)得到环流控制的目标函数J2,取J2最小情况下的子模块导通数Kdiff,j。由Kp、Kn和Kdiff,j,即可得出在保证输出电流稳定的情况下对系统的环流抑制效果达到最佳的子模块导通数。
详细MPC的控制流程见图6b。此时若将上述流程得到的上、下桥臂的子模块导通数直接驱动子模块投切将会导致子模块电容电压波动[22],因此再对上、下桥臂子模块电容电压进行排序,根据桥臂电流的正负确定子模块的开关状态。如果桥臂电流大于0,则投入电容电压较小的子模块进行充电;如果桥臂电流小于0,则投入电容电压较大的子模块进行放电。
4 仿真验证与分析
为验证MMC-VSG的岸电电源基本特性及MPC策略的效果,在MATLAB/Simulink仿真环境下搭建并网仿真模型,相应仿真参数见表1。根据钢质海船入级及建造规范以及相关资料,船舶中压电力系统交流电压一般为6 kV/50 Hz或6.6 kV/60 Hz,大型港口一般从地区电网接受35 kV或110 kV高压电能,经降压为6~10 kV级再配送到各前沿配电所,因此取交流输出电压为6 kV/50 Hz。
4.1 船电与岸电电源预同步并网
船电与岸电电源并网时必须保证频率与电压幅值一致,采用改进的VSG可实现频率和电压幅值对电网的零偏差跟踪。设定MMC-VSG工况:0~0.5 s内为空载运行;0.1 s启动预同步单元;0.5 s并网开关闭合。
图7为直接并网和预同步并网三相输出电流波形。由图7可知:直接并网时并网瞬间冲击电流可达2 000 A;经过預同步控制后并网,并网电流仅为10 A。直接并网时由于岸电与船电电压在幅值、相位上存在差异,并网瞬间产生较大的电流振荡,很可能导致设备损坏或引起继电保护,直接导致并网失败。图8为相同条件下,加入预同步环节的岸电电源a相输出电压ua与船电a相电压ug,a波形对比及VSG功频控制器输出电压与岸电电源机端输出电压波形对比。由图8a可知,经过约0.3 s的调节,并网两侧电压相位逐渐减小直至重合,完成同步,验证了预同步并网方法的有效性。由图8b可以看出,滤波器的存在导致两者存在一定的相位偏差,若仍采用VSG功频控制器输出的电压作为参考电压进行预同步控制,则即便经过预同步环节,岸电电压与船电电压也不能完全同步。
4.2 岸电电源并网、离网仿真分析
设岸电电源额定容量为3 MW,船舶电网带1 MW阻性负载和200 kV·A感性负载;在0~0.5 s内岸电电源空载运行;0.1 s时启动并网预同步单元,0.28 s时预同步完成;0.5 s时打开并网开关并进行负载转移,0.8 s时负载转移完成;1 s时断开船电断路器,由岸电电源独立供电;1.2 s时突加0.5 MW有功负载,200 kV·A无功负载;1.4 s时突减0.5 MW有功负载,200 kV·A无功负载。
4.2.1 带阻抗负载时MMC-VSG仿真分析
岸电并网切离网过程的岸电输出有功功率、无功功率、电流、电压、频率波形见图9。
由图9a可知,VSG能够按系统调度指令向电网发送有功功率和无功功率。为降低负载突变对电网的冲击,在负载转移过程中加入限定,使负载在
0.3 s内逐渐转移完毕,在0.5 s并网的瞬间切除预同步,导致VSG的电网频率与船舶电网的存在一定的偏差,此时通过向船舶电网吸收或注入功率使VSG侧电网频率与船舶电网频率同步,造成有功功率在0.5 s时出现一个小幅的下挫。图9b展示出在负载转移过程中,VSG的输出电流逐渐增大而非突变,实现了船电与岸电的平滑过渡。在1.2 s和1.4 s时分别进行的负载突变测试表明,所设计的系统对此工况有很好的响应跟踪性能。由图9c可知:三相电压整体输出波形稳定且正弦度良好,仅在离网和负载突变瞬间电压因无功调压作用而出现小幅波动(约70 V),但仅经过0.03 s电压就快速恢复稳定。由图9d可知:在0.1 s时由于启动预同步单元,VSG通过调节逆变器输出电压的角频率来追踪电网相位,引起频率降低;在0.5 s时向电网输出有功功率,此时MMC-VSG输出的三相交流电电压频率上升;同理,在1.2 s和1.4 s时负载突变导致频率波动。
4.2.2 MMC内部环流均压仿真分析
图10a为MMC a相环流波形对比:由无环流抑制的a相环流波形可知,在负载转移完成且稳定后(即在1 s时)其波动范围为15~40 A;经过MPC后的a相环流在1 s时的波动范围仅为27~29 A,系统的环流减小了92%。可见该方法对系统的环流具有很好的抑制效果。图10b为MMC a相上桥臂子模块电压,其电压波动范围为990~1 010 V,远低于在额定值±10%范围内波动的要求。这说明该控制策略具有很好的电容电压均衡能力。
调制策略的VSG输出电流对比。由图11可知:采用MPC的VSG在系统负载突变时能够在0.004 s内立即响应,而传统的VSG则需要约0.02 s才能完成对电流的跟踪。
4.2.3 电机启动过程仿真分析
在0~1 s完成负载转移后,断开断路器,由岸电独立供电;在1.05 s时启动三相异步鼠笼式电机(其额定功率为37 kW,额定电压为400 V,额定频率为50 Hz,额定转速为1 480 r/min),电机的转速、电流和VSG输出电流波形见图12。
由图12可知:在电机启动瞬间产生约1 400 A的冲击电流,使电网电流在启动时产生剧烈波动;当电机在1.35 s时达到额定转速后,系统逐渐恢复稳态运行。
5 结 论
港口岸电系统能够实现稳定平滑的无间断式并网切换,在独立供电应对突发状况时具有优良的动态响应能力,能满足船舶电力系统的稳定运行要求。
本文通过MATLAB/Simulink平台,对基于模型预测控制(MPC)和模块化多电平换流器(MMC)的虚拟同步发电机(VSG)系统进行了仿真研究。仿真结果表明:①采用改进的预同步并网,岸电输出电压与船电电压可实现完全同步,使得船电与岸电并网时冲击电流大幅度减小;②改进了VSG的控制策略,通过引入MPC不仅使得逆变器具有很好的环流抑制能力和电容电压均衡效果,而且在保证电力系统稳定的前提下使岸电电网在工况突变时的响应速度较传统的载波移相调制策略提升了约80%。
参考文献:
[1]宋新涛. 推行船舶岸电技术发展绿色航运经济: 关于张家港靠港船舶使用岸电思考[J]. 航海, 2015(1): 68-69. DOI: JournalArticle/5b3b8f8bc095d70f007db4d9.
[2]赵伟. 船舶岸电电源控制策略研究[D]. 大连: 大连海事大学, 2018.
[3]侯珏. 船舶与岸电并网控制策略研究[J]. 船舶工程, 2017, 39(1): 86-90. DOI: 10.13788/j.cnki.cbgc.2017.01.086.
[4]陳枫, 应鸿, 徐鲲鹏, 等. 船舶岸电电源多机并联的并网无缝切换技术的研究[J]. 电气工程学报, 2017, 12(4): 33-37. DOI: 10.11985/2017.04.006.
[5]YU Kai, AI Qian, WANG Shiyi, et al. Analysis and optimization of droop controller for microgrid system based on small-signal dynamic model[J]. IEEE Transactions on Smart Grid, 2016, 7(2): 1-11. DOI: 10.1109/TSG.2015.2501316.
[6]DARCO S, SUUL J A. Equivalence of virtual synchronous machines and frequency-droops for converter-based microgrids[J]. IEEE Transactions on Smart Grid, 2014, 5(1): 394-395. DOI: 10.1109/TSG.2013.2288000.
[7]SHI Kai, YE Haihan, SONG Wentao, et al. Virtual inertia control strategy in microgrid based on virtual synchronous generator technology[J]. IEEE Access, 2018, 6: 27949-27957. DOI: 10.1109/ACCESS.2018.2839737.
[8]ZHONG Qingchang, WEISS G. Synchronverters: inverters that mimic synchronous generators[J]. IEEE Transactions on Industrial Electronics, 2011, 58(4): 1259-1267. DOI: 10.1109/TIE.2010.2048839.
[9]LI Chengyu, XU Jianzhong, ZHAO Chengyong. A coherency-based equivalence method for MMC inverters using virtual synchronous generator control[J]. IEEE Transactions on Power Delivery, 2016, 31(3): 1369-1378. DOI: 10.1109/TPWRD.2015.2499262.
[10]滕磊. 船舶船岸电无间隙转换系统建模与控制策略研究[D]. 武汉: 武汉理工大学, 2018.
[11]ZHONG Qingchang, NGUYEN P L, MA Zhenyu, et al. Self-synchronized synchronverters: inverters without a dedicated synchronization unit[J]. IEEE Transactions on Power Electronics, 2013, 29(2): 617-630. DOI: 10.1109/TPEL.2013.2258684.
[12]杜千. 基于MMC的虚拟同步发电机控制策略研究[D]. 北京: 北京交通大学, 2019.
[13]GUTIERREZ B, KWAK S S. Modular multilevel converters (MMCs) controlled by model predictive control with reduced calculation burden[J]. IEEE Transactions on Power Electronics, 2018, 33(11): 9176-9187. DOI: 10.1109/TPEL.2018.2789455.
[14]LI Yunwei, KAO C N. An accurate power control strategy for inverter based distributed generation units operating in a low voltage microgrid[C]//2009 IEEE Energy Conversion Congress and Exposition. IEEE, 2009: 3363-3370. DOI: 10.1109/ECCE.2009.5316306.
[15]钟庆昌. 虚拟同步机与自主电力系统[J]. 中国电机工程学报, 2017, 37(2): 336-349. DOI: 10.13334/j.0258-8013.pcsee.162325.
[16]魏亚龙, 张辉, 孙凯, 等. 基于虚拟功率的虚拟同步发电机预同步方法[J]. 电力系统自动化, 2016, 40(12): 124-129, 178. DOI: 10.7500/AEPS201 50727006.
[17]RAJAN E, AMRUTHA S. Synchronverter based HVDC transmission[C]//International Conference on Innovations in Power and Advanced Computing Technologies. IEEE, 2017: 1-6. DOI: 10.1109/IPACT.2017.8245084.
[18]AOUINI R, MARINESCU B, KILANI K, et al. Improvement of transient stability in an AC/DC system with synchronverter based HVDC[C]//2015 12th International Multi-Conference on Systems, Signals & Devices. IEEE, 2016: 1-6. DOI: 10.1109/SSD.2015.7348137.
[19]SHINTAI T, MIURA Y, ISE T. Oscillation damping of a distributed generator using a virtual synchronousgenerator[J]. IEEE Transactions on Power Delivery, 2014, 29(2): 668-676. DOI: 10.1109/TPWRD.2013.2281359.
[20]陈芃. MMC模型預测控制研究与优化[D]. 武汉: 华中科技大学, 2019.
[21]MOON J W, GWON J S, PARK J W, et al. Model predictive control with a reduced number of considered states in a modular multilevel converter for HVDC system[J]. IEEE Transactions on Power Delivery, 2015, 30(2): 608-617. DOI: 10.1109/TPWRD.2014.2303172.
[22]袁小峰. MMC整流器关键技术研究[D]. 南京: 南京航空航天大学, 2017.
(编辑 贾裙平)
