自动化集装箱码头堆场箱区布置及交换区车道配置仿真
2021-10-08彭云陈磊李相达王文渊
彭云 陈磊 李相达 王文渊


摘要:针对自动化集装箱码头的堆场箱区布置和交换区车道配置问题,利用多智能体仿真方法构建自动化集装箱码头作业系统仿真模型,分析不同的堆场箱区布置和交换区车道数量对码头吞吐量和服务水平的影响,并对船舶到港时间间隔与自动导引车(automated guided vehicle, AGV)配置数量进行敏感性分析。结果表明,相较于箱区平行于码头岸线布置,箱区垂直于码头岸线布置的码头吞吐量和服务水平更高。在不同的AGV配置数量下,通过合理配置交换区车道可减少AGV的等待时间,提高码头吞吐量和服务水平。
关键词: 自动化集装箱码头; 堆场平面布置; 交换区车道配置; 多智能体仿真
中图分类号: U656.1+35;U691
文献标志码: A
收稿日期: 2021-03-25
修回日期: 2021-05-08
基金项目: 国家重点研发计划(2020YFE0201200)
作者简介:
彭云(1988—),女,辽宁铁岭人,副教授,硕导,博士,研究方向为港口规划与物流、绿色港口资源优化配置与能源调配,(E-mail)yun_peng@dlut.edu.cn
Meeting of the Waterborne Transport Division, World Transport Convention 2021 (WTC 2021)
Simulation on yard block layout and lane configuration in transfer area of automated container terminals
PENG Yun, CHEN Lei, LI Xiangda, WANG Wenyuan
(State Key Laboratory of Coastal and Offshore Engineering, Dalian University of Technology, Dalian 116024, Liaoning, China)
Abstract: For the issue of the yard block layout and lane configuration in the transfer area of automated container terminals, a multi-agent simulation method is used to construct the simulation model of the automated container terminal operating system. The influence of different yard block layouts and lane number in the transfer area on the terminal throughput and service level is analyzed. The sensitivity analysis for the ship arrival time interval and the number of automated guided vehicles (AGVs) configured is carried out. The results show that the terminal throughput and service level of the block layout vertical to the terminal shoreline are higher than those of the block layout parallel to the terminal shoreline. Under the different number of AGVs configured, the reasonable lane configuration in the transfer area can reduce AGVs waiting time and improve the terminal throughput and service level.
Key words: automated container terminal; yard plane layout; lane configuration in transfer area; multi-agent simulation
0 引 言
自動化码头在运行效率、人力成本等方面优势显著,传统码头自动化改造及新自动化码头的建造迅速,如厦门远海码头2016年完成自动化改造,上海洋山深水港四期自动化码头2017年12月开港试运营。自动化集装箱码头的平面布置是否合理,是其吞吐量和服务水平能否进一步提升的重要影响因素。堆场作为集装箱集中堆存与交接的区域,是码头的重要组成部分,因此对自动化集装箱码头堆场箱区布置和交换区设置进行研究很有必要。
近年来,国内外有关自动化集装箱码头堆场平面布置的研究主要包括箱区垂直于码头岸线与箱区平行于码头岸线布置形式的对比、自动化车辆选择及其路径规划、自动化场桥配置等的协同研究。陈曙权[1]利用Flexsim仿真和数学解析方法对厦门远海自动化码头当前的平行式布置与垂直式改进方案进行了仿真对比,并对自动导引车(automated guided vehicle, AGV)的数量配置进行了优化。刘洋等[2]针对具有驳船小港池且江海联运占比较高的海港自动化集装箱码头,指出其堆场箱区平行于码头岸线布置的优势。熊玲燕等[3]对几种自动化码头堆场布置模式进行了对比分析。KUMAWAT等[4]开发了程式化的半开放排队网络模型,用于研究一定的堆场箱区布局和资源下自动化运输车辆的选择对集装箱码头性能的影响。BAE等[5]利用仿真方法分析了不同类型的车辆与不同性能的码头起重机结合使用时的码头作业效率。KEMME[6]通过仿真评估集装箱码头堆场箱区布置和单箱区内自动化场桥配置对码头性能的影响。WANG等[7]以碳排放量最少为目标,从箱区长度、AGV和外集卡行驶车道数的角度对典型自动化集装箱码头平面布置进行了优化。GUPTA等[8]采用集成排队网络建模方法,研究了在集装箱码头边装边卸工艺下采用自动举升车(automated lifted vehicle, ALV)时的最佳箱区平行布局。ALCALDE等[9]考虑堆场拥挤对码头性能的影响,提出一个确定最优存储空间利用率的综合堆场规划方法。管政霖[10]采用系统仿真方法,在自动化集装箱码头常见的两种陆域集疏运装卸工艺的基础上研究了集疏运道路区域交通问题。杨勇生等[11]采用虚拟环岛策略建立仿真模型,比较AGV行驶路径对自动化集装箱码头作业效率的影响,为优化码头前沿路径提供了依据。然而,已有研究未考虑箱区端装卸工艺下带有AGV伴侣缓冲的AGV交换区车道数对自动化集装箱码头作业效率的影响。本文旨在研究特定装卸工艺下堆场布置选择对码头吞吐量和服务水平的影响,综合考虑AGV伴侣的缓冲作用,分析AGV交换区车道数量的最佳配置,通过对AGV数量等因素进行敏感性分析,厘清AGV交换区车道数与AGV数量的匹配关系。
自动化码头系统的不确定性和随机性因素较多,用传统的数学解析方法难以描述。为此,考虑船舶到港等港口随机因素和码头作业系统各部分之间的耦合影响,基于多智能体仿真方法构建自动化集装箱码头作业系统仿真模型,进行码头堆场箱区布置和交换区车道配置仿真研究。
1 问题描述
自动化集装箱码头堆场主要由箱区、自动化装卸设备和交换区组成。与端部装卸作业形式相匹配,箱区两端分别为AGV交换区和外集卡交换区,交换区内有若干条车道。综合考虑当前自动化集装箱码头装卸工艺的成熟情况和国内已建自动化码头的实际运营情况,采用“双小车岸桥+AGV+AGV伴侣+接力式双自动化轨道吊(automated rail-mounted gantry crane, ARMG)”装卸工艺。该工艺下AGV交换区每条车道配有AGV伴侣,可以暂存集装箱,实现AGV与ARMG的解耦,会对码头作业效率产生一定影响。为此,本研究中堆场平面布置方案主要从堆场箱区布置形式和AGV交换区车道数两个方面考虑。
1.1 堆场箱区布置形式
自动化集装箱码头堆场箱区主要有两种布置形式:垂直于码头岸线布置形式和平行于码头岸线布置形式,见图1。
箱区垂直于码头岸线布置形式:海侧为AGV交换区,陆侧为外集卡交换区,水平运输设备均不能进入箱区内部,保证了ARMG在箱区内部的高效作业;AGV行驶区采用夹层式布局,AGV行驶路径为回字形,以泊位为单位形成环路,泊位间连通;AGV行驶路径中间是缓冲区,主要由AGV停车位构成,为处于空闲状态的AGV提供临时停放空间。
箱区平行于码头岸线布置形式:每个泊位的后方箱区平行于岸线布置;两个泊位后方箱区的外集卡交换区相向布置,AGV交换区分布在不同侧;AGV行驶路径以泊位为单位形成“L”形环路,泊位间连通;其他布置与垂直于码头岸线布置形式的相同。
1.2 AGV交换区车道数
箱区端部通常设有交换区,交换区内布置一定数量的车道,如图1所示。其中,AGV交换区车道内布置有AGV伴侣,可辅助完成AGV与ARMG的交接箱作业,实现AGV水平运输与ARMG装卸作业的解耦。当AGV交换区车道数过少时,AGV在箱区侧的等待时间会增加;当AGV交换区车道数过多时,AGV在岸桥侧的等待时间会增加,即AGV交换区车道数会对自动化码头水平运输系统和箱区装卸作业系统产生影响。为此,需要合理配置AGV交换区车道数,在减少AGV等待时间的同时达到提高码头作业效率的最大效果。
2 自动化集装箱码头作业系统仿真模型
2.1 模型假设
不考虑AGV行驶过程中的拥堵和碰撞;集装箱均为20英尺(1英尺=0.304 8 m)标准箱;不考虑箱区内翻倒箱作业。
2.2 模型构建
2.2.1 模型逻辑流程分析
自动化集装箱码头作业系统可分为4个子系统:岸边装卸子系统、水平运输子系统、箱区装卸子系统和后方集疏运子系统。岸边装卸子系统主要由集装箱船、码头岸线、泊位、岸桥、水平运输设备AGV组成,其中岸桥服务船舶和AGV,完成集装箱在船舶与AGV之间的装卸作业。水平运输子系统主要由码头前沿至箱区侧的交通网络和AGV组成,AGV在岸桥与箱区侧之间往返运输集装箱。箱区装卸子系统主要由ARMG和箱区组成,每个箱区配置2台ARMG,通过2台ARMG的交接作业实现进口箱和出口箱从箱区一侧到另一侧的移动。后方集疏运子系统主要由外集卡、闸口、堆场、后方交通网络组成,实现出口箱集港和进口箱疏港。以进口箱为例的自动化集装箱码头作业流程见图2。出口箱与进口箱的作业流程相反。
2.2.2 仿真模型构建
在分析自动化集装箱码头作业流程的基础上,基于Anylogic智能体建模方法构建自动化集装箱码头作业系统仿真模型。模型主要包括集装箱智能体、主智能体、外集卡智能体、船舶智能体、AGV智能体等。
集装箱智能体分为进口箱和出口箱两类,见图3。进口箱由集装箱船生成,出口箱则由送箱集卡生成。集装箱生成时即被赋予进口箱或出口箱属性。
主智能体为仿真模型的基础智能体,也是仿真的外部环境。该智能体包含各类智能体的集合(见图4a),由输入的相关参数完成初始的设备配置。在主智能体环境下,可实现不同的码头平面布置方案的输入。
外集卡智能体分为送箱外集卡和取箱外集卡两类,送箱外集卡由主智能体生成,取箱外集卡则由进口集装箱生成。如图4b所示:外集卡在到达入港闸口后排队等待入港闸口服务;过闸后前往目标箱区,在到达目标箱区后按到达箱区的先后顺序排队等待接受ARMG服务;在接受ARMG服务后前往出港闸口离港。取箱外集卡作业流程同送箱集卡作业流程。
船舶智能体根据集装箱船的到港、排隊等待泊位、选择泊位靠泊、装卸船作业及离港过程构建,见图5a。其中泊位选择依据先到先服务的原则,先到港的船舶优先占用泊位,且优先选择可靠泊的最小空闲泊位,泊位吨级相同时随机选择空闲泊位。靠泊后,根据船舶属性生成相应数量的进出口集装箱,按照先卸后装原则进行装卸船作业,作业结束后船舶释放泊位离港。
AGV智能体由主智能体生成,数量一定。如图5b所示:AGV起初处于空闲状态,当接收到来自岸桥或堆场箱区的指令时进入工作状态,在卸船和装船作业期间AGV在岸桥与堆场箱区之间进行运输作业;若AGV在前一任务完成后未接收到下一条指令,则返回停车位,再次进入空闲状态,直至接收到下一条指令。AGV作为码头的一种资源,始终在系统中被循环利用。每辆AGV可以无差别地为全部岸桥和箱区服务,卸船时岸桥获取最近的空闲AGV执行一次卸箱指令,装船时场桥获取最近的空闲AGV执行一次装箱指令。
2.3 模型输出
(1)码头吞吐量。吞吐量是港口的主要运营指标之一,也是确定港口规模和作业能力的综合性指标,任何一个子系统作业出现“瓶颈”都将抑制码头吞吐量,因此选取其作为码头主要评价指标。
(2)船舶平均等待靠泊时间(average waiting time, AWT)/船舶平均在泊作业时间(average service time, AST)。AWT可以直接反映船方所接受的码头服务的优劣程度,相同水平下AWT越短,船方效益越高。由于AWT也受到码头装卸作业水平的影响,而AWT/AST是考虑港口服务水平和资源利用率的一个综合性指标,所以采用该指标衡量码头的服务水平。
(3)AGV完成每条指令的平均等待时间。该指标包含AGV在岸桥侧装卸箱的等待时间和箱区端部AGV交换区容量不足所导致的等待时间。该指标可以反映箱区端部AGV交换区车道配置是否合理。
3 算例分析
总结国内现有的投入运营较早的两个自动化码头——厦门远海自动化码头和青岛港自动化码头的建设概况(见表1)可知,每期工程一般对1个或2个泊位进行改造或建设。为模拟泊位之间的协同及堆場可能同时出现的装卸过程,算例中泊位数量拟定为2个。
参考表1,综合考虑现有自动化码头配置情况,算例设定:岸线长度为560 m,2个泊位均为3万吨级泊位,每个泊位配备3台岸桥,水平运输设备为30辆AGV,堆场每个箱区配置2台ARMG(分别负责其所在侧的装卸作业,不穿越行驶)。
3.1 基本参数
3.1.1 到港船型组合
算例泊位可靠泊3万吨级船舶(兼靠2万吨级、1万吨级集装箱船),根据规范中不同吨级集装箱船的载箱量范围[12]和不同船舶载箱量对应的单船装卸箱量范围[13],设置到港船舶的船型比例和装卸量,见表2。
3.1.2 到船规律
对大量船舶实际到港时刻的统计分析表明,集装箱船到港规律服从泊松分布,即到港时间间隔服从负指数分布[14]。考虑码头的设计通过能力和单船平均装卸量,设置船舶到港时间间隔服从均值为7.5 h的负指数分布。
3.1.3 外集卡集港到达时间
集装箱码头通常对每一航次对应的外集卡集港作业规定开始时刻和截止时刻,根据集装箱码头外集卡到达时刻的统计规律[15],设置外集卡集港到达时刻服从三角分布triangular(0,1,0.5)。
3.1.4 仿真方案
自动化码头堆场平面布置仿真方案见表3。受箱区宽度限制,当箱区数不同时,AGV交换区车道数取值范围不同。
3.2 仿真结果分析
3.2.1 堆场箱区布置形式结果分析
运行仿真模型,记录采取不同堆场箱区布置方案时的码头吞吐量和AWT/AST值。由图6可知,堆场箱区垂直于码头岸线布置时的码头吞吐量比平行于码头岸线布置时的高2.4%~14.0%,堆场箱区垂直于码头岸线布置时的AWT/AST比平行于码头岸线布置时的低3.5%~34.7%。各组方案AWT/AST在0.25~0.5范围内,即码头服务水平相差不大,且保持在较高水平。因此,综合考虑码头吞吐量和服务水平,宜选择堆场箱区垂直于码头岸线布置的方案。
3.2.2 AGV交换区车道数结果分析
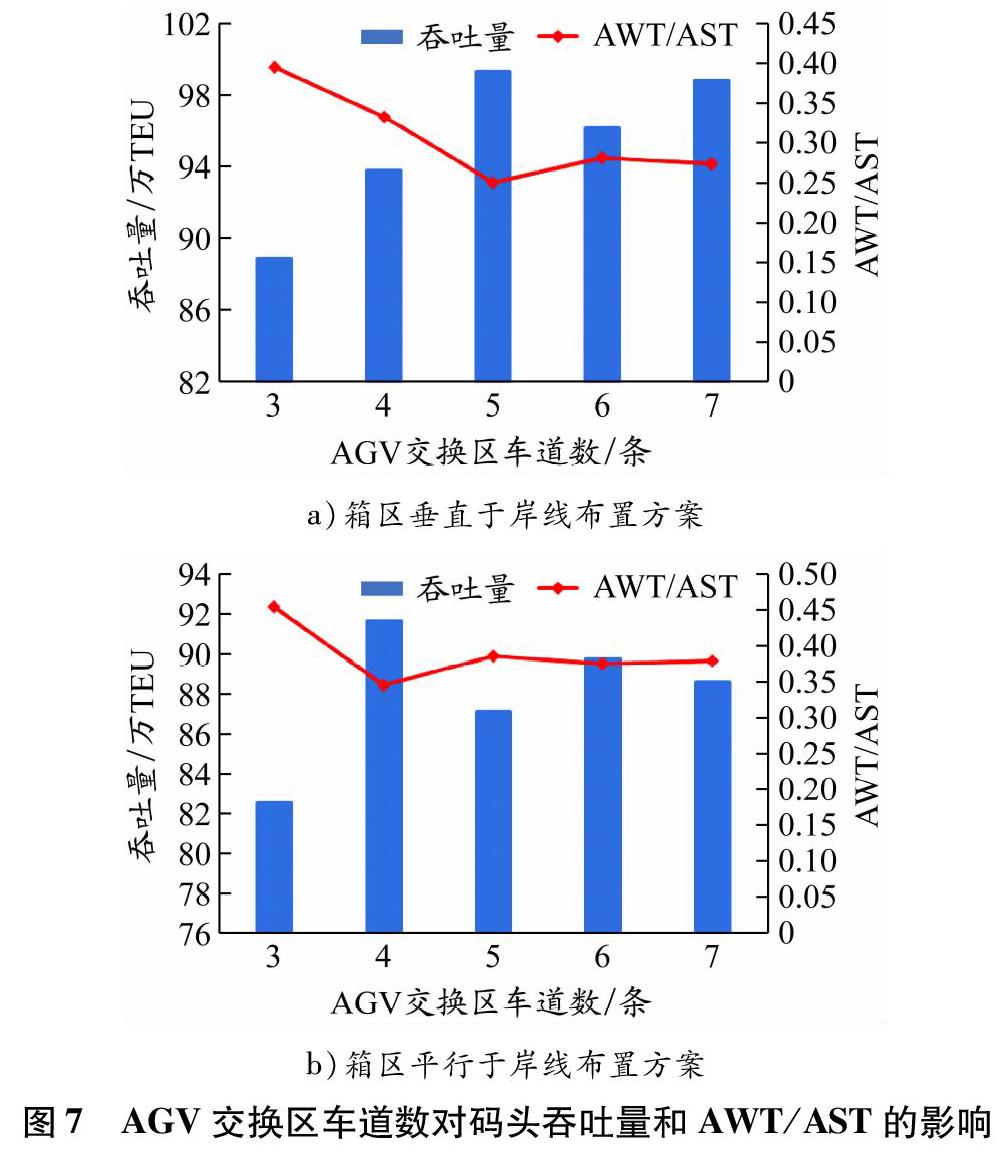
在配置30辆AGV的条件下,AGV交换区车道数较少时,AGV在箱区等待的情况会增多。如图7a所示:在箱区垂直于码头岸线布置的情况下,当AGV交换区车道数由3条增至5条时,码头吞吐量增长11.7%,AWT/AST下降36.4%。如图7b所示:在箱区平行于码头岸线布置的情况下,当AGV交换区车道数由3条增至4条时,码头吞吐量增长11.1%,AWT/AST下降24.0%;当继续增加AGV交换区车道数时,码头吞吐量和AWT/AST基本稳定。
当AGV交换区车道数较多时,出口箱装船进程加快,AGV在岸桥侧的等待时间因岸桥装卸效率的限制也会有所增加。AGV完成每一指令(包含装船和卸船两类指令)的平均等待时间随交换区车道数的变化见图8。在箱区垂直于码头岸线布置的情况下,当AGV交换区车道数为5条时,AGV平均等待时间最短,说明岸边和箱区装卸作业更均衡。同理,在箱区平行于码头岸线布置的情况下,当AGV交换区车道数为4条时,岸边和箱区装卸作业更均衡。
综上所述,在配置30辆AGV的条件下,在箱区垂直于码头岸线布置的方案中每个箱区的AGV交换区宜选择配置5条车道,在箱区平行于码头岸线布置的方案中AGV交换区宜选择配置4条车道。该配置能够使AGV工作中的平均等待时间减少,码头吞吐量增加,并在一定程度上提高码头服务水平。
3.2.3 船舶到港时间间隔与AGV配置数量敏感性分析
为分析船舶到港时间间隔、AGV配置数量不同的情况下AGV交换区车道数对码头吞吐量的影响,设置船舶到港时间间隔λ分别为6.0、6.5、7.0、7.5、8.0、8.5、9.0 h,AGV配置数量n分别为18、24、30、36、42辆的试验方案。仿真结果见图9。
由图9a可知,在不同的船舶到港时间间隔下,码头吞吐量均随AGV交换区车道数的增加而缓慢增加。随着船舶到港时间间隔减小,码头吞吐量逐步增加,但增加幅度变小,表现出泊位通过能力的限制。由图9b可知,不同AGV配置数量下,码头吞吐量随AGV交换区车道数的增加呈上升趋势,但最佳AGV交换区车道数有一定差异。如在n=18辆和n=24辆方案中,当AGV交换区车道数为4条时,基本表现出该AGV配置水平下码头吞吐量的上限;而在n=30辆和n=36辆方案中,当AGV交换区车道数为5条时,才达到该AGV配置水平下码头吞吐量的上限。当AGV配置数量较多时,最佳AGV交换区车道数也相应增多。通过n=36辆与n=42辆方案的对比,可以看出AGV配置数量已经充足,不再是码头的瓶颈。综上,相比于船舶到港时间间隔的变化,AGV交换区车道数的最佳选择对AGV配置数量的变化更为敏感,在进行AGV交换区车道配置时需优先考虑当前码头AGV配置数量。
4 结 论
本文基于多智能体建模方法建立自动化集装箱码头作业系统仿真模型,从码头吞吐量、服务水平和AGV平均等待时间的角度,对比分析堆场箱区垂直于码头岸线布置和平行于码头岸线布置两种形式和多种AGV交换区车道配置方案,并针对船舶到港时间间隔和AGV配置数量进行敏感性分析,研究成果可为自动化集装箱码头堆场平面布置的选择提供依据。
下一步可对港内的道路细化布置,同时考虑车辆之间的碰撞、拥堵等交通因素,更真实地模拟自动化集装箱码头车辆的运行情况,对码头平面布置中的车辆行驶路径、车道数量等要素进行仿真研究。此外,自动化集装箱码头建设成本和设备成本较高,可以与码头作业效率共同考虑,进行自动化集装箱码头平面布置的多目标优化研究。
参考文献:
[1]陈曙权. 厦门远海自动化码头平面布置及设备配置优化研究[D]. 广州: 华南理工大学, 2017.
[2]劉洋, 麦宇雄, 覃杰. 适用于江海联运海港自动化集装箱码头的总体布置方案[J]. 水运工程, 2019(9): 119-124. DOI: 10.16233/j.cnki.issn1002-4972.20190904.017.
[3]熊玲燕, 岳金灿. 自动化集装箱码头堆场布置模式简析[J]. 港工技术, 2018, 55(5): 42-44, 93. DOI: 10.16403/j.cnki.ggjs20180510.
[4]KUMAWAT G L, ROY D. AGV or lift-AGV? Performance trade-offs and design insights for container terminals with robotized transport vehicle technology[J]. IISE Transactions, 2020: 1-19. DOI: 10.1080/24725854.2020.1785648.
[5]BAE H Y, CHOE R, PARK T, et al. Comparison of operations of AGVs and ALVs in an automated container terminal[J]. Journal of Intelligent Manufacturing, 2011, 22(3): 413-426. DOI: 10.1007/s10845-009-0299-1.
[6]KEMME N. Effects of storage block layout and automated yard crane systems on the performance of seaport container terminals[J]. OR Spectrum, 2012, 34: 563-591. DOI: 10.1007/s00291-011-0242-7.
[7]WANG Nanxi, CHANG Daofang, SHI Xiaowei, et al. Analysis and design of typical automated container terminals layout considering carbon emissions[J]. Sustainability, 2019, 11(10): 2957. DOI: 10.3390/su11102957.
[8]GUPTA A, ROY D, DE KOSTER R, et al. Optimal stack layout in a sea container terminal with automated lifting vehicles[J]. International Journal of Production Research, 2017, 55(13): 3747-3765. DOI: 10.1080/00207543.2016.1273561.
[9]ALCALDE E M, KIM K H, MARCHN S S. Optimal space for storage yard considering yard inventory forecasts and terminal performance[J]. Transportation Research Part E, 2015, 82: 101-128. DOI: 10.1016/j.tre.2015.08.003.
[10]管政霖. 自动化集装箱码头陆域集疏运装卸工艺与交通问题研究[D]. 武汉: 武汉理工大学, 2018.
[11]杨勇生, 王楠楠, 梁承姬, 等. 基于环岛策略的自动化码头AGV路径仿真优化[J]. 铁道科学与工程学报, 2018, 15(1): 240-246. DOI: 10.19713/j.cnki.43-1423/u.2018.01.031.
[12]交通运输部. 海港总体设计规范: JTS 165—2013[S]. 北京: 人民交通出版社, 2013.
[13]中交第三航务工程勘察设计院有限公司, 中国港口协会. 自动化集装箱码头设计规范: JTS/T 174—2019[S]. 北京: 人民交通出版社, 2019.
[14]姜东瑞. 浅析班轮公司船舶到港规律[J]. 中国水运, 2020(5): 46-47. DOI: 10.13646/j.cnki.42-1395/u.2020.05.018.
[15]杨小明, 宓为建, 陶其钧. 自动化集装箱码头设计与仿真[M]. 上海: 上海科学技术出版社, 2016.
(编辑 贾裙平)
