红外人体测温精度补偿方法研究
2021-10-08卢知非刘浩宇陈文亮王向军
卢知非,刘浩宇,陈文亮,王向军
(1.天津大学 精密测试技术及仪器国家重点实验室,天津 300072;2.天津大学 微光机电系统技术教育部重点实验室,天津 300072)
0 引言
近20年来,因具有非接触式、响应快速、可动态测温等优势,红外测温技术在工业生产[1-2]、科学研究[3]、医疗卫生[4]等领域得到了广泛的应用。面对全球范围内新冠疫情的爆发,一套可以无接触精确测量体温的系统亟待实现。基于红外热成像技术的非接触式测温仪器通常采用可见光相机和红外热成像相机作为测温探头,基于可见光图像确定测温区域,基于对应的红外热成像区域确定被测者温度。非接触式红外热成像测温方案测量速度快,可以实现远程自动测量,避免接触感染的风险。但目前的非接触式红外测温方案缺乏对测温场景的深入挖掘,没有合理的温度补偿方案,测温精度低于±0.5℃,在测量精度上低于接触式测量方法[5]。
为实现基于红外热成像器件的人体温度非接触式精确测量,本文研究了一系列有助于提升人体测温精度的方法,针对红外相机存在周期性斩波信号,测温距离不固定,测温值包含较多频域噪声等问题,进行了一系列理论分析和实验验证,采用了补偿和滤波等多种方法提升测温精度。在现有测温方案的基础上,应用本文提出的补偿技术,可以达到更高的测量精度。
1 红外测温原理和误差分析
任何高于绝对零度的物体都会不断地向外发射红外线,所辐射的红外能量强弱与其温度有正相关关系,温度越高辐射越强,这就是红外测温的基本原理[6]。
红外热成像技术以普朗克辐射定律为理论基础,利用光电转换器件将被测物体表面的热辐射能量转换为电平信号[7]。在忽略杂散辐射和被测物体表面反射率等干扰因素的理想情况下,红外传感器的电平输出值与该点接收到的红外辐射值的函数关系如式(1)所示:

式中:Vd、g、Rλ、Ar、τop分别为红外传感器电平输出值高低、系统增益、红外光学系统的响应度、透镜的有效孔径及光学系统的透过率。E(λ,T,A0,d)为红外相机接收到的原始辐射值。它与红外波长λ,物体表面温度T,热像仪最小空间张角对应目标的可视面积A0及被测物体到红外相机成像平面距离d有关。由普朗克公式可计算出理想黑体辐射的出射度与温度的关系:

因此红外相机接收到的原始辐射值和物体温度的关系可以表示为:

式中:E(λ,T,A0,d)为红外相机接收到的红外辐射值;A0为热像仪最小空间张角对应目标的可视面积;d为被测物体到红外相机成像平面距离;τaλ为大气的光谱透射率[8]。λ2和λ1为红外相机工作波段上下限;ελ为物体表面发射率;T为物体表面温度;C1和C2分别为第一,第二辐射常数。
结合式(1)和式(3)可以发现,在理想情况下,红外热成像相机的输出电平值和被测温度值具有一一对应的关系。根据标准黑体多次标定的最小二乘拟合结果,就能得到被测物体表面温度和红外相机输出值的关系。
根据式(3)的结果,也可以分析出,利用红外热成像器件进行人体温度测量时,影响温度测量准确度的因素包括红外辐射值-温度值函数的系数精度,被测者和红外相机的距离,红外相机输出值夹杂的噪声电平等。针对这些影响测温精度的因素,需要进行对应性的补偿和滤波操作。
2 全图像域噪声的抑制方法
直接用黑体标定后的红外相机进行温度测量,会面临许多问题:如红外辐射值和温度值对应函数随时间漂移,红外相机周期性斩波信号造成错误的测量值输出。但这些问题具有一个共同点:它们作用于整幅红外热图像,同一时刻不同像素点处引起的噪声幅值大致相同。为此,设计了基于标准黑体辐射源的实时温度校准技术,来抑制输出值漂移和周期性斩波信号对测量结果的影响。
每次测量过程中,在离红外热成像相机固定距离,固定角度处放置已知温度的参考黑体,通过一段时间内红外相机对该黑体上多点测量值的集合,对辐射值-温度值对应函数的系数进行最小二乘修正,对视场中其他位置的测量值施加一个偏移修正量,得到更为精确的测量结果。
为验证补偿方法的实际效果,将一个已知温度(45℃)的黑体作为被测对象,分别记录不引入实时补偿方法和采用实时补偿与抑制方法后的黑体实测温度值。实验结果如图1所示。

图1 实时补偿效果对比图Fig.1 Comparison of real-time compensation effect
从图1可以看出,如果不对测量值漂移和红外相机斩波信号进行处理,测量点的温度值会严重地受到噪声影响,并产生周期性的异常测量值,测量误差最大为1.5℃。而采用本文的实时补偿方法后,可以将误差降低接近一个数量级。测量值基本稳定在45℃,上下波动基本不超过±0.3℃。因此,全图像域的噪声抑制方法可以有效减小红外相机输出值的噪声,将红外相机对标准温度输出值的误差降低到0.3℃左右。
3 基于频域分析的滤波方案
为进一步研究红外相机输出规律,分析红外相机的误差组成中是否存在可以修正的系统误差,采用残余误差观察法对红外相机的输出值进行分析,并在实验数据分析的基础上,提出基于频域分析的3 种滤波方案,改善了测量结果的准确性和稳定性。
3.1 基于残余误差观察法的系统误差分析
设计实验对高精度黑体进行实时温度测量,以获取相机输出信号基频特性:将一个高精度黑体放在固定位置,温度设置为45℃。按照全图像域输出噪声抑制方法对红外相机的热图像补偿完毕之后,记录一段时间内的高精度黑体实测温度值。对获取的测量值序列进行离散傅里叶变换,同时对测量结果的时域和频域信息进行观察,结果如图2所示。
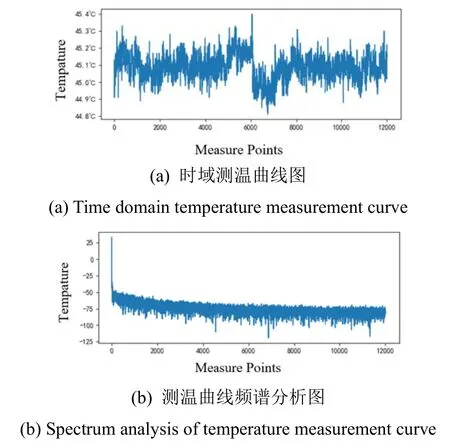
图2 时域和频域的测量分析图Fig.2 Measurement analysis chart in timedomain and frequency domain
通过对时域信息的观察,发现测量值并没有明显的变化趋势或变化规律。对频域信息的观察也印证了这一点,只有0 Hz 处的振幅在0db以上,其他频率处的振幅值都在0 db以下,表明信号的主要组成分量是0Hz 的基频信号,其它频率分量基本可以视为白噪声。
3.2 多种滤波方法的实验测试
从测量结果的频域实验分析中可以发现,测温信号的基频频率约为0Hz,除基频信号外混杂着频率跨度广泛的白噪声信号。为消除白噪声的影响,获取较为稳定的基频信号,取3.1中测量结果的一部分,分析比较了中值滤波、平均滤波和低通滤波3种信号滤波方法的处理效果,以测量点数为横坐标,实测温度为纵坐标,比较结果如图3所示。

图3 三种滤波效果对比图Fig.3 Comparison of filtering effectsof t hree filters
分析实验结果可以发现,对原始的温度测量结果采取一定的滤波方案有利于从杂乱的白噪声中分离出人体温度的基频曲线,稳定测量结果。因此,结合实际应用场景,提出了如下几种可以降低白噪声影响的滤波方案:
①限幅滤波:对比当前帧测量结果与之前多帧人体温度测量数据的平均值,差值超过一定阈值时,舍弃本帧的温度测量数据。
②δ准则剔除粗大误差:按照更为严格的δ误差剔除原则,判断新的人体温度数据是否为异常测量值,是异常值时予以剔除。
③递进算术中值滤波:保存多组连续帧的人体温度测量数据,在测量过程中不断剔除旧数据和加入新数据,保持数据的不断更新。将温度数据排序,取中间多组温度数据的平均值作为最终的测量输出结果。
多种滤波方案的综合运用提高了测量结果的准确性和稳定性,避免了由于环境或相机自身原因导致的数据异常波动现象。
4 基于人体特征尺度的测温距离-温度补偿
由式(3)可知,红外热成像相机接收到的辐射值与测温距离的二次方成反比,说明测温距离对非接触式红外测温的精度有显著影响[9],且无法通过滤波或抑制的方法进行消除。实际实验表明,红外相机的测温距离在1~3m 的范围内变化时,对保持固定温度的物体,测量结果会产生最大3℃的偏差。
目前,部分基于红外热成像的非接触测温系统都采用定距测量的方式,测量过程具有很大的局限性。具有距离补偿功能的测温系统,大多采用额外的深度摄像头或超声测距模块[10]对距离进行测量。这种距离补偿方式需要额外软硬件支持,并需要对深度图像和可见光图像进行关联。随着测量步骤的增加,测量链的延长,测量误差也不可避免地增大。
对于常规的红外热成像人体温度测量系统,在不引入额外器件的情况下,只能根据可见光与红外相机的输出图像对被测者距离进行估计。红外图像相较于可见光图像分辨率低,特征信息不明显,因此距离估计主要依赖可见光图像中包含的信息。
通过一张可见光图像所包含的信息进行距离估计,主要有基于深度学习和基于单目测距的两种距离估计方法。基于深度学习的距离估计方法需要大量的数据集使网络得到距离估计的相关经验,目前能够实现的测距精度较差[11-12]。因此考虑使用单目测距的方法,来对人体测温距离进行估计。
基于人体特征尺度的测温距离-温度补偿方法主要分为两部分:首先根据单目距离估计的方法得到测温距离的近似值,然后根据不同距离下的人体测温实验测定温度补偿值的大小。
4.1 单目距离估计原理
单目相机的距离估计依赖于相机的针孔成像模型,如图4所示。单目距离估计以PnP问题为基础,通过求解相机的外参矩阵,得到被测物体到相机的大致距离。

图4 相机小孔成像模型示意图Fig.4 Schematicof camera pinhole imaging model
根据相机的小孔成像模型,可以推导出像素坐标系与世界坐标系的转换关系:


式中:p为像素坐标系下的坐标;P为世界坐标系下的坐标。在已知相机内参矩阵和对应点坐标的情况下,只需要通过多组方程的联立,就可以解出矩阵从而得到空间中一点和相机的距离。
为了同时获得某一点在像素坐标系和世界坐标系下的坐标,需要有已知的物体尺寸或已知的物体尺寸-像素数的对应关系。在实际场景中,测温对象、测量环境都是不断变化的,在可见光图像中难以找到保持恒定的长度量。
但考虑到红外热成像人体测温应用的特殊性,测温场景中总是存在人体尺寸特征。特殊地,采用人脸或额头测温方式时,可见光图像中存在丰富的人脸特征信息,可以利用不同人脸中相对不变的尺寸特征,作为测温距离估计的基础。本文采用相对变化较小的人脸特征尺寸作为点在世界坐标系中的坐标依据,并使用人脸特征点检测的方法在像素坐标系中得到相应特征点的坐标。
4.2 人脸特征相似性依据及其提取
采用人脸特征尺寸进行测温距离估计,首先要求人脸特征的实际尺寸保持相对稳定,人脸特征的像素尺寸可以计量。
依据现行国家标准:成年人头面部尺寸[13]中的相关信息,以其中关于面宽和形态面长的统计数据为例,成年男性和成年女性的面宽和形态面长尺寸如表1所示。
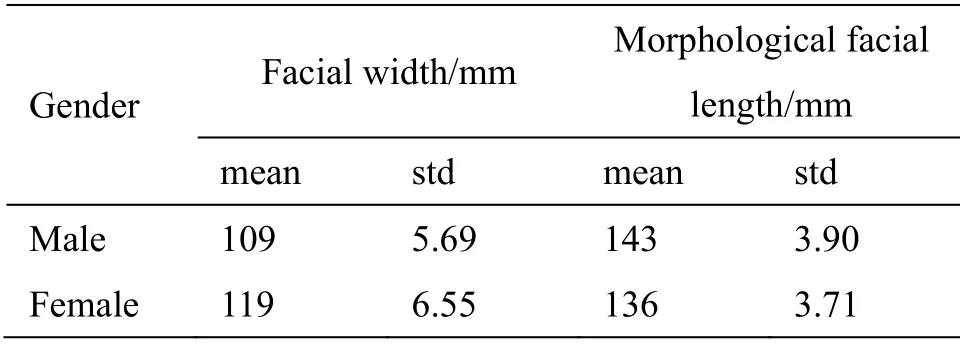
表1 中国成年人面宽和形态面长统计表Table 1 Statistical table of face width and shape length of Chinese adults
对比表中数据,可以发现:①对于同一性别的成年人群,脸部特征的相对标准差都在5%左右;②对于不同性别的成年人群,脸部特征平均值的变化幅度都在10%以内。因此,可以认为对于不同性别的不同人群,脸部特征尺寸变化幅度较小,可以作为距离估计的参考量。
人脸特征的像素尺寸统计依靠的是特征点检测技术。人脸关键点检测技术是计算机视觉领域进行人脸识别的步骤之一,它可以在人脸面部定位多个关键点的坐标,如眼眶,脸颊,上下嘴唇,眉毛等[14]。目前,应用最为广泛的是基于深度学习的人脸关键点检测方法[15-16],其中特征点最全面的81 点人脸关键点检测效果如图5所示。对选定的多组人脸特征,可以通过人脸关键点检测的方法取出对应的像素坐标信息。
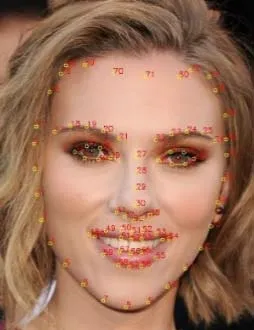
图5 人脸关键点检测示意图Fig.5 Facial key point detection
4.3 距离估计实验设计
在假定不同人群具有相同面部特征,且特征点都在同一平面的前提下,可以根据国家标准:成年人头面部尺寸[13]得到多个特征点在世界坐标系下的坐标值。假设总共使用m个特征点,以特征点所在平面的法线方向为Z轴,将各个特征点与其在世界坐标系下对应的坐标记为P1(0,0,0),P2(X1,Y1,0),…,Pm(Xm,Ym,0)。
记可见光图像像素坐标系下m个点的坐标分别为(u1,v1),(u2,v2),…,(um,vm),根据小孔成像模型,可以得到m组方程:

取81 点人脸关键点中的部分点,并在国家标准:成年人头面部尺寸[13]中查询这些关键点之间的距离。按照上述过程建立超定方程组,对不同人在不同位置处进行多次试验,在每次实验中求方程组的最小二乘解并与实测距离进行比较。在4 次实验中距离估计值与准确值的差距如图6所示。可以看出,在1.0~2.2 m的测量范围内,基于人脸特征的距离估计误差小于±0.1 m,在可接受范围内,大大降低了由测温距离引起的温度误差。
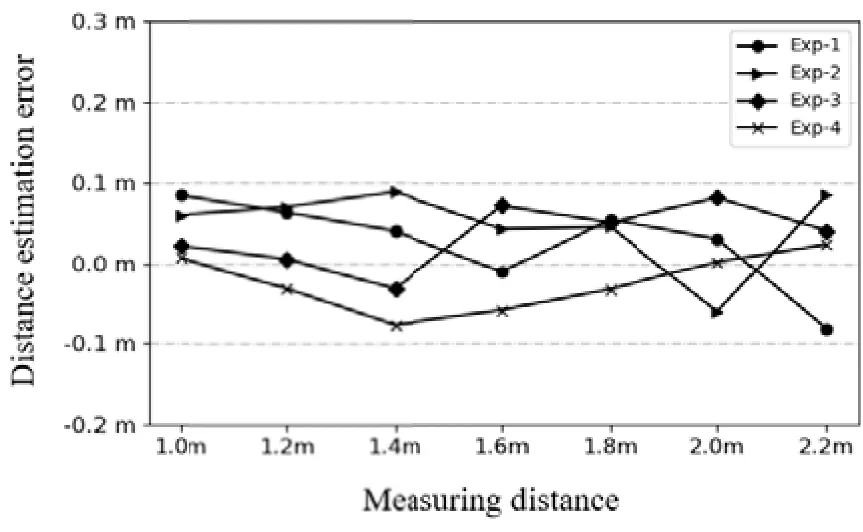
图6 距离估计精度示意图(4次实验)Fig.6 Distance estimation accuracy(4experiments)
4.4 距离补偿实验设计
在获取被测者与红外相机的距离后,采用分段线性插值的方式对由距离引起的测温误差进行补偿。每隔0.2 m 测定一组数据,记录不同距离下人体温度准确值和红外相机测量值之差,多次测量取平均值作为该距离下的补偿值。对0.2 m 间隔的内部区间,采用线性插值的方式进行近似补偿。具体补偿值如表2所示。

表2 不同距离下的补偿值及其方差Table 2 Compensation values and variancesunder different distances
不同距离下平均补偿值的方差都保持在较低水平,说明本文的噪声抑制方法和频域滤波方案可以保证测量的稳定性。根据测温距离确定补偿值后,进行了4次不同距离下的测试实验,实验结果如图7所示。可以看出,在采用多种精度提升方案后,达到了较高的测温精度:在1.0~2.2m 的测量范围内,温度测量误差小于±0.2℃。

图7 测温精度示意图(4次实验)Fig.7 Temperature measurement accuracy(4experiments)
5 结论
本文提出几种提升红外人体温度测量准确度的方法。对影响测温精度的因素进行了大量的实验分析,设计了多种补偿和滤波方案,实现了相较于现有方法较大幅度的精度提升。