碳纳米管的快速拾取策略及电学性能测量
2021-10-04耿松超孙立宁
马 立,耿松超,杨 权,陈 涛,孙立宁
(1.上海大学 机电工程与自动化学院,上海 200444;2.苏州大学 机器人与微系统中心,江苏 苏州 215021)
1 引 言
碳纳米管(Carbon Nanotubes,CNTs)作为当今纳米领域的热门材料之一,具有独特的电学、机械、化学以及力学性能,在新型功能材料和高性能器件方面展示了巨大的应用前景[1-3]。目前,一些学者已经对CNT在场效应晶体管、传感器和探测器等电子器件上的应用进行了深入的研究[4-8]。为拓宽CNT的应用范围,从CNT生长基底上拾取长直的CNT是至关重要的一步。
国内外学者针对CNT的拾取、装配和性能测试搭建了不同的微纳操作系统。福田敏男教授[9]在扫描电子显微镜(Scanning Electron Micro‐scope,SEM)内使用带针尖的原子力显微镜(Atomic Force Microscope,AFM)悬臂梁探针为末端执行器对散落的CNT进行拾取、移动和杨氏模量的测量,但该方法对未断裂的CNT并不适用。随后,该课题组Liu[10]等设计了一种在SEM中通入氧气,并使用电子束轰击CNT使其在轰击位置氧化断裂的方法,以达到对CNT拾取的目的,但是该方法需要额外的气体输入,SEM的真空环境被破坏,且氧气量较难控制。Fatikow等[11]设计了微纳夹持器,可以将独立的CNT从基底上拉断达到拾取效果,但是其尺寸较大,不适用于排列紧密的CNT阵列。杨湛[12-14]等人在SEM的真空舱内搭建了16自由度的微纳操作系统,并采用AFM探针为末端执行器从基底上将CNT拉伸至断裂的方式拾取CNT,但是由于CNT与AFM探针表面的范德瓦尔斯力较小,CNT经常从AFM探针表面脱落导致拾取失败。随后,他们提出使用电子束诱导沉积法,通过沉积多个沉积点加强CNT和AFM探针表面的接触力并降低接触电阻,但是该方法沉积点位置难以控制且每沉积一个点要几到几十分钟不等,拾取操作过程时间较长。孟岭超[15]等人提出将CNT焊接在金属电极两端,通过局部焦耳热处理降低CNT与金属间的接触电阻,但却忽略了接触长度和接触位姿对接触电阻的影响。为了缩短操作时间,提高CNT的拾取成功率并对电学性能进行测量,本文提出一种快速拾取CNT的操作方法并对其电学性能进行分析。在扫描电子显微镜内搭建微纳操作系统,使用钨针和原子力显微镜探针协同操作的策略与碳纳米管搭建切割拾取电路,在两端通电实现对碳纳米管的快速切割拾取。保持钨针与碳纳米管接触状态不变,建立碳纳米管与原子力显微镜探针点接触和线接触电路模型,分析接触位姿对电学性能的影响,并在线接触电路模型情况下改变碳纳米管与原子力显微镜探针的接触长度,研究接触长度对接触电阻的影响。
2 基于SEM的微纳操作系统
基于SEM(SU3500,HiTachi)的微纳操作系统主要由4个微纳操作机器人单元组成,每个操作单元配备相应的末端夹持器,以方便操作末端执行器在微纳尺度范围内进行作业,如图1(a)所示。该微纳操作系统安装在扫描电镜真空腔中的样品台上,每个操作单元都具有x,y,z轴3个方向的平移自由度,且具有粗定位和精定位两种定位模式,各项性能参数如表1所示。其中,粗定位采用黏滑驱动的方式,精定位采用压电陶瓷驱动柔性铰链的方式。SEM成像具有实时性,操作者可以通过SEM图像反馈实时控制操作对象。
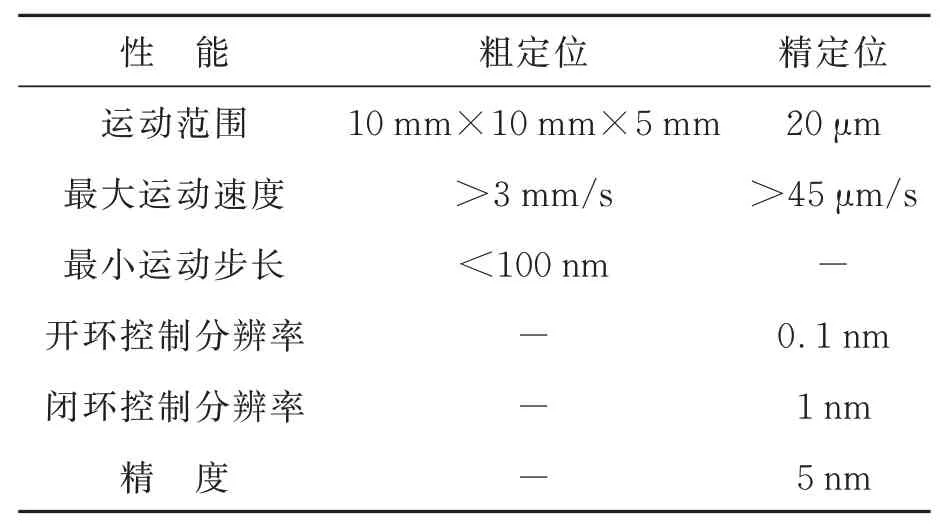
表1 微纳操作单元的性能参数Tab.1 Performance parameters of micro-nano operating units
本文使用的样品是由化学气相沉积法制成的CNT阵列,高度为300μm,纯度为98%。首先,使用导电胶的边缘自上而下垂直地从样品生长基底上粘附部分CNT,这样能保证CNT竖直排列且空间内分散分布,方便CNT的拾取和电路搭建(见图1(b))。将带有样品的导电胶粘附在单元1上的夹持器的顶端,带有CNT端朝向外侧;使用钨针(ST-20-0.5,GGB)和无针尖三角形的AFM探针(PNP-TR-Au,Nanoworld)作为末端执行器分别装于单元2和单元3的夹持器上,钨针是圆锥形结构,针尖直径为200 nm(见图1(c)),将钨针折弯至90~120°之间,能有效避免在拾取过程中非目标CNT对拾取操作过程的影响,且能保证针尖的侧壁与CNT接触。AFM探针(见图1(d))两个悬臂梁的长度分别为200 μm和100μm,厚度均为0.5μm,且探针表面镀有一层金薄膜。AFM探针与CNT样品相对放置,方便AFM探针与CNT接触。将CNT拉伸至水平直线状态,此状态下方便单元2的末端执行器钨针与CNT的侧壁接触形成钨针-CNTAFM探针的接触模式,有利于拾取电路的搭建。

图1 微纳操作系统Fig.1 Micro-nano manipulation system
3 拾取操作方法及切割电路模型
由于CNT在基底上的生长状态是杂乱无章的,且很多CNT互相缠绕形成一个碳纳米管束,排列密集,CNT的拾取难度很大。本文基于上述操作系统,提出在SEM的高低放大倍率下协同操作钨针和AFM探针与CNT搭建切割电路的策略,实现对CNT的快速拾取,并对电路中的电压电流数据进行测量,讨论不同接触位姿对接触电路的影响。
3.1 CNT拾取的微纳操作方法
微纳操作机器人装入SEM的真空腔前,需要手动对各个操作单元的位置进行初步调节,方便后续CNT的拾取电路的搭建,且节省大量时间。将带有样品的单元1夹持器移动到操作平台的中心位置且保持水平位置;单元2的末端执行器为钨针,调节钨针的位置,保证针尖在CNT样品左上方且接近样品;单元3的末端执行器为AFM探针,将AFM探针的位置调节至CNT样品的右侧下方且接近样品。完成上述一系列操作后将微纳操作机器人集成在SEM的真空腔内。
SEM中的深度信息可根据其提供的工作距离参数来判断,该参数代表当前图像中最清晰的位置与物镜极靴下表面之间的距离。SEM成像原理是将电子枪产生的电子经光阑和透镜等会聚成一点轰击样品,并收集轰击产生的二次电子来成像。电子束会聚点所在的平面被称为SEM的焦平面,位于焦平面上的物体在电镜所成图像中清晰度最高,物体离焦平面越远所成图像越模糊,且焦平面可以通过SEM图像控制器进行调节,使不同物体位于焦平面上。结合SEM上述两个特征,可以确定SEM在z轴方向的深度信息。
首先对CNT样品进行观察,拾取合适的目标CNT。因为SEM不能观察深度信息,而且AFM探针的初始位置位于CNT样品的侧下方,所以AFM探针始终在CNT样品的下方。确定好目标位置后,只需在x和y轴方向移动AFM探针即可,在低放大倍率下AFM探针移动速度较快,能快速移动至目标CNT附近。在高倍率下进行精调,当观察到CNT的自由端和AFM探针表面重合时,基本上可以判定AFM探针已经位于CNT的正下方。在高放大倍率下,将目标CNT调节至最清晰状态,此时CNT位于焦平面上。保持当前焦平面不变,在低放大倍率下,向z轴正方向快速移动AFM探针至CNT所在焦平面附近,然后在高放大倍率下进行z轴方向精调。在此过程中观察CNT自由端的状态变化,当CNT末端状态发生变化时CNT已与AFM探针表面发生接触。
CNT与AFM探针表面分线接触和点接触两种情况。其中,点接触分为CNT端点与AFM探针接触和CNT与AFM在交叉点接触。线接触情况下,CNT和AFM探针间的范德瓦尔力较大,有利于CNT的拾取和转移,CNT不易从AFM探针表面脱落。而点接触CNT容易从AFM探针表面脱落,不利于后续CNT的转移和装配,故点接触为不良接触,需保证CNT与AFM探针是线接触状态。本课题组已经提出沿先z轴后x轴或先x轴后z轴两种将点接触校正至线接触的操作方法[16]。上述为拾取过程中AFM探针的操作策略,这种操作方法能有效缩短AFM探针的定位时间,提高了效率,避免因速度过快而与样品或者其他末端执行器发生碰撞导致实验失败。
在CNT与AFM探针间范德瓦尔力的作用下,目标CNT会沿x轴拉伸至直线状态。然后,需要操作单元2的末端执行器钨针与目标CNT的侧壁接触,完成切割电路的搭建。钨针的初始位置位于CNT样品的左上方,故钨针在平面内的移动不会与CNT样品和AFM探针发生碰撞。首先,在低放大倍率下沿x和y轴方向移动钨针至目标CNT区域。然后再在高倍率下进行精调,将拉伸至直线状态的目标CNT的清晰度调整至最高。此时目标CNT所在的平面即为焦平面,而钨针则在此焦平面的上方,清晰度较低,需要在z轴方向对钨针进行调节,使它与CNT位于同一焦平面内。保持当前焦平面不动,在低放大倍率下钨针沿z轴负方向快速移动至CNT所在焦平面附近,然后在高放大倍率下沿x,y和z轴方向进行精调,使钨针与CNT的侧壁接触。因为CNT和钨针之间会存在范德瓦尔力的作用,当两者接触时,CNT在范德瓦尔力的作用下产生形变。当观察到CNT的状态发生变化时,可以判定CNT与钨针已经接触。
3.2 CNT电学性能测量
各个操作单元可以通过电控箱与外部电源连接。本实验采用吉时利(Keithley)的2280S可编程直流电源,该电源可提供0~32 V的直流电压,实时显示电路中的电压和电流,满足测量要求。CNT拾取的切割电路模型如图2(a)所示。在钨针和AFM探针两端通电可实现CNT的快速成功拾取,如图2(b)所示。

图2 切割电路模型Fig.2 Model of cutting circuit
电路中的电阻由3部分组成。其中,R1为钨针与CNT接触时所形成的接触电阻,R1=ρc/Ac,ρc为CNT和钨针接触时的特殊电阻率,该值主要由接触区域的局部化学性质以及费米能级决定,Ac表示接触区域。在操作的过程中保证已经接触的钨针和CNT接触状态不变或者在同一区域接触,因此R1为一个固定值。假设CNT轴向无任何缺陷且直径均匀,则CNT的电阻R为:

其中:rcnt为CNT的电阻率,l2为钨针和AFM探针间CNT的长度。假设所拾取的目标CNT由n个单根CNT组成,它们在电路中构成并联电路,则钨针和AFM探针间CNT的电阻R2为:

假设CNT与镀金的AFM探针表面完全线接触,会产生接触电阻Rc,该值随接触长度l3的变化而变化。电路中的总接触电阻Rct=R1+Rc,其中R1为固定值,电路中的CNT总长度不变,l2和l3的变化能直观地反映出电路中的总电阻RT和Rc的变化。切割电路中总电阻RT为:

联立式(1)~式(3)可得:

其中:RT通过实验测量得出,l2,l3通过SEM直接测量得出。改变CNT与AFM探针的接触长度l3,会得到不同的RT,l2,Rc。由于电路中R1为固定值,通过计算得出的Rct可以直观地反映出CNT与镀金的AFM探针接触长度l3和两者产生接触电阻Rc之间的关系。
4 CNT的拾取实验及电学性能测量
4.1 CNT拾取实验
依据第3节所述的操作策略对目标CNT进行拾取。CNT样品和各个探针的位置分布如图3(a)所示。AFM探针的操作步骤如下:
(1)图中方框内标记位置为目标CNT所在位置;
(2)确定目标位置后,低放大倍率下使AFM探针快速移动至目标CNT位置附近,如图3(b)所示;
(3)高放大倍率下对AFM探针进行精调,调整SEM的焦距使目标CNT位于焦平面内,清晰度达到最高,如图3(c)所示。而后保持焦平面不变,由于AFM探针位于CNT的下方,和CNT不在同一焦平面上故AFM探针成像模糊;

图3 AFM探针操作示意图Fig.3 Process of AFM probe operation
(4)保持(3)中的焦平面不变,在低放大倍率下调节AFM探针,能快速沿z轴正方向移动AFM探针接近CNT所 在焦平面,如图3(d)所示;
(5)在高放大倍率下对AFM探针在x,y轴方向进行精调,确保AFM探针在目标CNT的正下方,如图3(e)所示。操作AFM探针以2μm的步距沿z轴正方向运动,观察图3(e)和3(f)发现AFM探针逐渐与目标CNT在同一焦平面上,且CNT的位姿状态发生轻微变化,表明CNT与AFM探针已经接触。对CNT和AFM探针的接触状态进行判断,在x和y轴方向移动AFM探针将CNT拉伸至直线状态。观察图3(g)和3(h)发现CNT与AFM探针表面接触长度和接触端点没有发生任何变化,两者的接触状态良好,为线接触。此时AFM探针操作完毕。
CNT与AFM探针完全线接触后,利用两者间的范德瓦尔力拾取CNT,操作AFM探针以2 μm的步距沿x,y轴方向移动。在拾取过程中发现,CNT从AFM探针脱落至点接触状态如图4(b),CNT拾取失败。由此表明,仅仅依靠CNT与AFM探针间的范德瓦尔力将CNT拉伸至断裂的方式很难成功拾取CNT。但CNT与AFM探针的点接触状态并不影响后续通电切割拾取CNT电路的搭建。对钨针进行操作,进行切割电路的搭建,具体操作过程如下:
(1)AFM探针将目标CNT拉伸至直线状态后,在低放大倍率下沿x,y轴方向快速移动钨针至目标CNT附近,如图4(a)所示;
(2)在高放大倍率下,将目标CNT的清晰度调节至最高,保持当前焦平面不变,由于钨针在CNT所在焦平面上方,故成像模糊如图4(b)所示;
(3)在低放大倍率下快速沿z轴向下移动钨针至与CNT大致在同一焦平面附近,而后在高放大倍率下在x,y和z轴方向调节钨针,使钨针尖端靠近目标CNT且两者在同一焦平面上,如图4(c)所示;
(4)操作钨针以2μm的步距沿x,y和z轴方向移动,在操作过程中观察到CNT在范德瓦尔力的作用下吸附在钨针表面,且CNT会产生一定的形变,CNT与钨针已经接触,如图4(d)所示。保持钨针与CNT接触状态不变,此时完成CNT与AFM探针点接触电路的搭建。
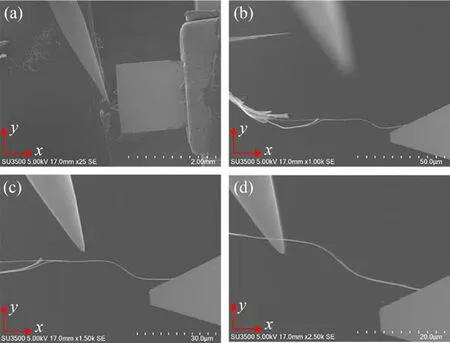
图4 钨针操作示意图Fig.4 Process diagram of tungsten needle operation
操作AFM探针将接触状态校正至线接触状态,并将CNT拉伸至水平直线状态,如图5(a)和5(b)所示,此时完成CNT与AFM探针线接触电路模型的搭建。在钨针和AFM探针之间施加一个线性增加的直流电压,并记录电路中电流的变化。为避免SEM的电子束影响切割电路中的电流,在切割拾取CNT的实验过程中关闭了SEM的成像功能,通过电路中电流值的变化来判断CNT的状态。当电路中的电流突然急剧减小至0时,电路为断路状态,则CNT切割拾取成功,如图5(c)所示。多次实验表明,在SEM高低放大倍率下协同操作AFM探针和钨针通电切割成功拾取CNT的用时在8 min左右,拾取成功率达到90%以上;而一般工作者正常操作SEM成功拾取CNT的用时在50~60 min,成功率仅有20%左右,可见本文提出的操作方法不仅提高了实验的成功率,还为实验操作节省了大量时间。

图5 CNT切割拾取过程Fig.5 Process of CNT cutting pickup
4.2 CNT电学性能测量
在实验过程中,保持钨针和CNT的接触状态不变,或者在同一位置接触保证两者产生的接触电阻R1不变,在图5(b)状态下操作AFM探针改变CNT与AFM探针的接触长度l3,同时钨针和AFM探针间CNT的长度l2随之改变。为避免热效应影响电路,在0~1 V的低电压下测得电路中的电流,并通过计算得出电路中总电阻RT,R2及总接触电阻Rct。针对同一目标CNT,重复上述操作3次,测得3组数据如表2所示。
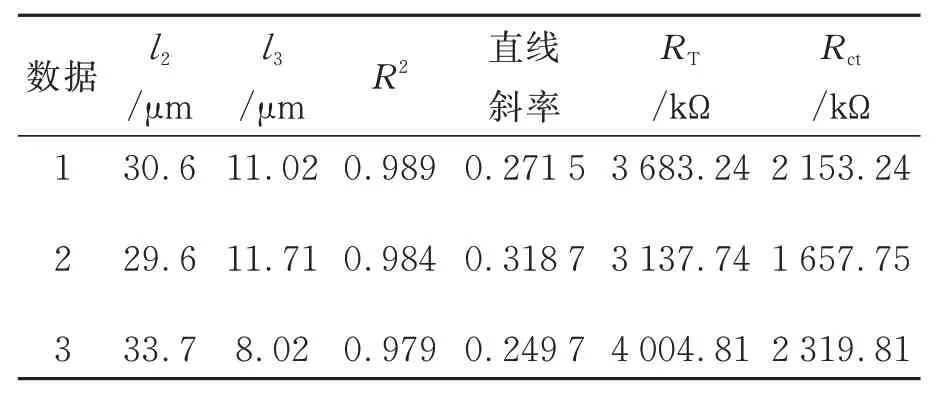
表2 实验结果Tab.2 Experimental results
化学气相沉积法制成CNT的直径在20~50 nm,根据SEM的放大倍率,可以估算出所拾取的CNT束由4根CNT互相缠绕形成,包含金属性和半导体性CNT,在0~1 V的低电压下所测得的I-V数据如图6所示。3组数据的线性拟合度R2均在0.97以上,可以判定电路中电压-电流为线性关系,表明低电压下当CNT与钨针和金表面同时接触时属于欧姆接触。切割电路中的总电阻RT可由拟合直线的斜率得出,3组不同接触长度下的总电阻如表2所示。在切割电路中,CNT的电阻率rcnt为200 kΩ/μm[17],将表2中数据代入式(4),可以得到在接触电阻R1固定的情况下,CNT与镀金的AFM探针不同接触长度l3下的总接触电阻Rct,该值能直观反映出Rc的大小。从表2中的数据可以得出,CNT与金表面接触所产生的接触电阻Rc与两者的接触长度l3成反比,接触长度l3越大,所产生的接触电阻Rc越小。
图7(a)和7(b)分 别 是 同 一 目 标CNT与AFM探针在点接触状态(4(d))和线接触状态(5(b))下,在0~1 V的低电压下测得的I-V数据。从图7(a)可以看出,点接触状态下I-V曲线表现出明显的非线性,电路状态不稳定,数据变动较大,此时CNT与钨针和金表面的电学接触并非是欧姆接触。图7(b)为线接触状态下测得I-V数据,拟合直线的拟合度R2为0.992 78,拟合直线的斜率为0.530 91,电压-电流表现出明显的线性关系,证明CNT与钨针和金表面的电学接触为欧姆接触,电路中的总电阻约为1.88 MΩ。实验表明,CNT与金属接触的电学性能与两者的接触状态有直接关系,CNT与金属表面点接触状态下电路状态及其不稳定。由于CNT与金属表面线接触状态下的电路状态相对稳定,当制造或修复纳米器件时,应使CNT与金属电极线接触,这样有利于提高纳米器件的性能。

图7 点接触和线接触状态下的I-V数据Fig.7 I-V data and fitting line under point and line con‐tacts
图8是在线接触状态下从开始通电到成功切割拾取CNT整个过程中电压和电流的关系。随着电压的增加,电路中的电流随之增加,电路中的电流在17 V的电压下突然快速下降至零,证明切割电路为断路状态,CNT被成功拾取。从测得的电压电流数据可以看出,电路中的电压-电流表现出明显的非线性关系,证明所拾取的CNT表现为半导体性质,但是在低电压下CNT与钨针和镀金的AFM探针的表面接触状态却表现出欧姆接触。这是因为在低电压下CNT与金属表面产生的肖特基势垒比较稳定,对电路的影响基本可以忽略,而随着电压的增大势能逐渐减小导致电路中的电流呈现非线性。

图8 CNT断裂时I-V数据Fig.8 I-V data when CNT fractured
5 结 论
本文基于SEM搭建微纳操作机器人系统,提出使用钨针和AFM探针在SEM高低放大倍率下协同操作的策略与CNT搭建切割拾取电路,通过通电切割的方法对CNT进行拾取,建立CNT与AFM探针点接触和线接触电路模型,分析接触位姿对电学性能的影响,并在线接触电路模型情况下改变CNT与AFM探针的接触长度,研究接触长度对接触电阻的影响。实验结果表明,本文提出的操作方法能将CNT拾取实验控制在8 min左右,成功率在90%以上;CNT与镀金的AFM探针表面线接触状态下,在0~1 V的低电压下CNT与钨针和金表面为欧姆接触,接触电阻与两者的接触长度成反比;而在点接触状态下,低电压下电路表现出明显的非线性,为非欧姆接触,证明接触状态对CNT与金属接触的电学性能有一定的影响。该操作方法和CNT与金属接触的电学性能测量对后续CNT快速拾取装置的性能测量和装配具有一定的指导意义。