基于Adams的森林防火机器人履带平台设计与动力学仿真
2021-09-30刘泽新王希贵林文树
刘泽新,王希贵,林文树
(东北林业大学 工程技术学院,哈尔滨 150040)
0 引 言
随着经济和技术不断发展,人类所涉足的作业环境也在不断地增加,其中很多高危作业环境,如野外探索、煤矿监测运输、核工业及林火防护等。在这些高危的作业环境下,亟需发展特种机器人来代替人类进行相关工作[1-2]。目前森林火灾作为严重的自然灾害和突发性的公共危险事件,具有解决困难、发生突然和起势极快等特点。并且森林防火及其检测难度都较大,单靠人力检测与防治难度大、成本高、劳动强度高和风险大。因此,提高和发展现代森林消防实力及装备是非常紧迫和必要的[3-4]。
针对目前的林业消防机械和困难地形的行走问题,徐振亚等[5]、朱亚荣[6]、宋倩[7]研究了六足仿生机器人,使其可以进行余火探查问题;马岩等[8]研究的履带式风力灭火机行走机构,改进了履带结构,可实现复杂地面上的行走。刘少刚等[9]研究的可变形履带通过椭圆形成原理获得了更好的张紧效果,提高了翻越障碍的能力。孙英暖等[10]、孟广耀等[11]通过引入液压可伸缩式后摆臂,设计出液压摆臂履带变形机器人,提高了履带张紧能力和越障能力。朱岩等[12]研究的履带可变形机器人,通过对转臂进行较大幅度的调节提高了越障能力。贾海东等[13]研究的轮履复合巡检机器人具有轮式和履带2种模式,可以实现在矿井复杂地面环境下的设备巡检工作。李智卿等[14]开发的轮履复合变形移动机器人结合轮式和履带式的运动优点可以适应复杂路面的运动。孙鹏等[15]研制的轮履复合式机器人通过轻量化、模块化设计,保证了设备的快速装配和维修。李允旺等[16]从运动学的角度分析了四履带双摆臂机器人的越障性能,推导出最佳的越障性能及对应的摆臂位置。布升强等[17]设计出一种自适应的蚁群算法,提高了森林防火机器人在轨迹搜寻上的速度和准确度。日本的Ito等[18]研究的串联多履带机器人,通过多节履带仿照蛇的运动方式进行越障。Kamezaki等[19]研究的四臂四履带式机器人通过4个履带臂提高爬楼梯的稳定性,并应用于灾难后的救援工作。
综合国内外的研究情况,目前的森林监测的自动化机器人主要是足式机器人的研究,虽然足式机器人适应地形能力高,越障能力强,但是其造价成本高,搭载能力不强。履带式机器人虽然越障能力上稍逊于足式机器人,但对于工作环境要求不高,负载性能好,更加适用林区环境。可变形履带相较于普通履带有更好的张紧效果,且履带的变形和辅助机构的添加可以得到更好的越障效果。但可变形履带目前多用于城市救援中的越障研究,未进行在林区中应用的相关研究,将其应用于林区消防领域有助于提高森林防火机器人在森林中行进速度和越障能力。因此本文针对人工林以及森林公园等地形不是非常复杂的环境,提出将可变形履带应用于森林消防机器人,从而实现机器人在森林火灾监测时更好地行进。
1 森林防火机器人履带平台结构设计
1.1 整体结构设计
本研究主要是针对森林防火机器人的履带平台为研究对象,机器人的控制装置不做详细的介绍。履带平台主要由辅助履带、主动轮、平台主体、搭载配件、辅助变形轮、从动轮、减震轮和主履带组成;通过平台主体中的控制器实现对履带在越障时的各种变形;为了减少履带运行时的阻力,增加张紧力,履带选用后置驱动;保证辅助变形轮不出现在履带内转动卡死的情况,在安装电力推杆的同时加装弹簧阻尼,并在摆杆上加装驱动电机;同时为减轻履带行进时的振动,履带平台采用了一种阻尼弹簧结构的减震轮。履带平台结构外观如图1所示,其相关的主要参数见表1。

注:1-辅助轮;2-主动轮;3-平台主体;4-搭载配件;5-从动轮;6-辅助变形轮;7-减震轮;8-主履带。
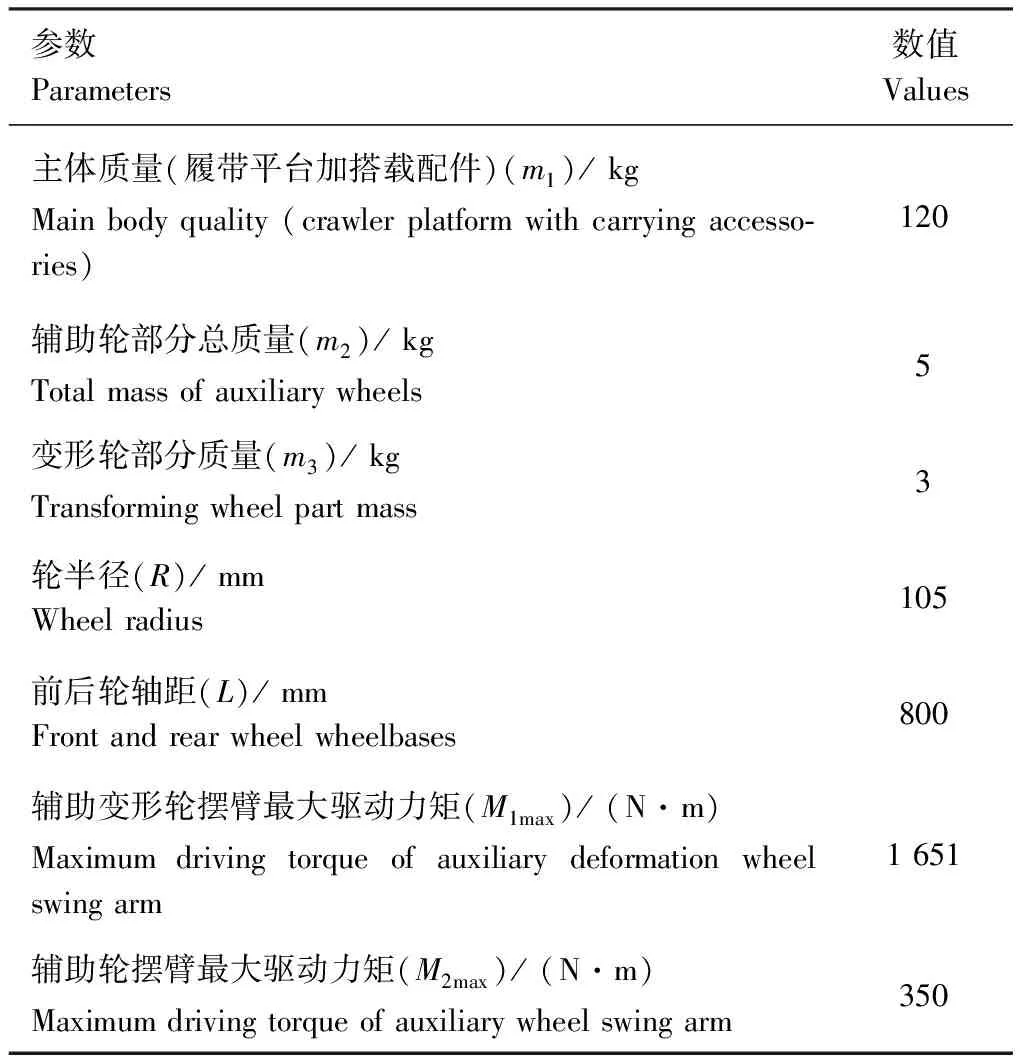
表1 森林防火履带平台主要参数
1.2 工作原理
本文的可变形履带采用椭圆形成原理构成,通过辅助变形轮的变形实现平台越障时更好地增加与地面的接触面,提高了运动的稳定性,增强了越障能力,其原理如图2所示。

图2 结构原理图
在图2中,F1、F2为椭圆的焦点,P1为椭圆轨迹上的可移动点,通过椭圆的规律可知P1F1+P1F2=2a,并且在F1、F2确定时,三角形F1P1F2的周长为常数。故根据此原理,本机器人履带在F1、F2位置分别安放从动轮和主动轮,并在沿椭圆轨迹上的位置P1安放行星轮,行星轮通过安装于OP1之间的液压杆伸缩使行星轮在椭圆轨迹上运动,履带的长度近似为此椭圆轨迹内构成的三角形F1P1F2的周长,且因为履带具有一定弹性,可相当于长度基本不变。通过液压杆的连续伸缩驱动OP1臂转动,以达到所能实现的结构变换效果。
2 森林防火机器人履带平台越障机理分析
由于林区地形复杂,越障的种类及分布也十分复杂,因此,越障能力的高低是该履带平台能否适用于林区的重要性能指标。林区地形是由自然形成的地势起伏和坑洼,以及人工建成的沟道和阶梯等。本文设计的机器人主要应用于人工林与森林公园的地形,为方便分析与仿真将障碍地形进行简化,通过较为简单的模型对越障能力进行分析。
2.1 攀爬阶梯分析
履带平台攀爬阶梯的过程如图3所示,其整个过程可主要分为3个阶段:第1阶段(a)—第2阶段(b)为前履带接触阶段;第3阶段(c)—第4阶段(d)为辅助履带支撑阶段;第5阶段(e)—第6阶段(f)为攀爬完成阶段。
通过图3可知,整个森林防火机器人履带平台通过前方的液压伸缩杆和后方的辅助履带轮进行调节,改变整个平台装置质心的位姿,以保证其可以翻越一定高度的阶梯。下面对本履带平台能攀爬的最大高度进行分析计算。

图3 履带平台攀爬高地过程图
通过建立以F1为坐标原点,以F1F2方向的直线为X0轴的直角坐标系X0F1Y0,可以计算整个履带平台的质心G0的位姿,其坐标系如图4所示。
森林防火机器人履带平台的质心G0位置为:
(1)
式中:m1、m2、m3分别为履带平台主体部分质量、变形主臂部分质量、辅助履带的质量;L2为坐标系X0F1Y0质心G2距O的距离;L3为质心G3距F1的距离;L4为坐标系X0F1Y0中OF1的长度;G1、G2、G3分别为履带平台主体部分质心、变形主臂部分质心和辅助履带部分质心;G1(x1,y1)为履带主体部分质心坐标。
根据图4的几何关系可知凸起障碍的高度为:
(2)
式中:H为凸起障碍的高度;θ、α、β分别为图4上的角度;R为履带轮半径。
对公式(2)进行求关于β的二阶偏导值:

(3)

图4 森林防火机器人履带平台质心分布图
2.2 翻越沟壑分析
本森林防火机器人履带平台翻越沟壑成功与否,主要依据是其重心的垂线是否越过沟壑边界。其翻越过程如图5所示,整个过程可分为3个阶段:第1阶段(a)—第2阶段(b)为履带行进阶段;第3阶段(c)—第4阶段(d)为前履带支撑阶段;第5阶段(e)—第6阶段(f)为辅助履带翻越阶段。
通过图5可知,整个森林防火机器人履带平台通过前方的液压伸缩杆和后方的辅助履带轮的调节改变整个平台装置质心的位姿,以保证可以跨越一定距离的沟壑。下面对本行进装置能翻越的最大沟壑距离进行分析计算。
当履带平台达到图5中(b)位置时,可能出现2种情况。
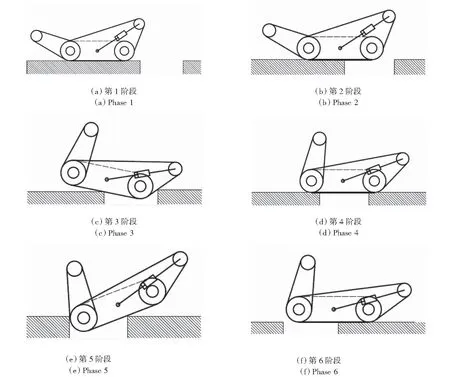
图5 履带平台翻越沟壑过程图
(1)履带平台质心达到沟壑左边缘,而前段履带接触到沟壑右边缘。此时履带平台会出现图6的临界状态,履带平台总质心在左沟壑边缘的延长线上。
由图6可知,履带平台可跨越的最大距离为:
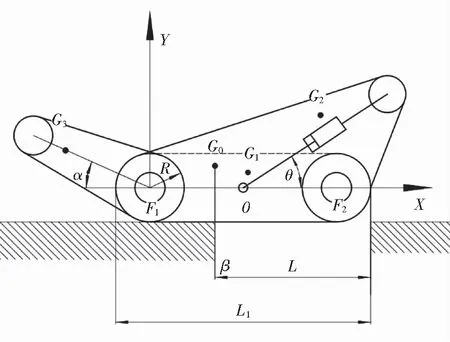
图6 质心翻越沟壑位置
Lmax=L1-R-XG0min。
(4)
当α=0°,θ→π时,履带平台的总质心达到该位置时的水平位置最小,并根据公式(1)可得:
(5)
将公式(5)代入公式(4)可得:
(6)
(2)履带平台在总质心未越过左边缘且刚要越过时,前段从动轮部分已掉到右侧沟壑中,其情况如图7所示。
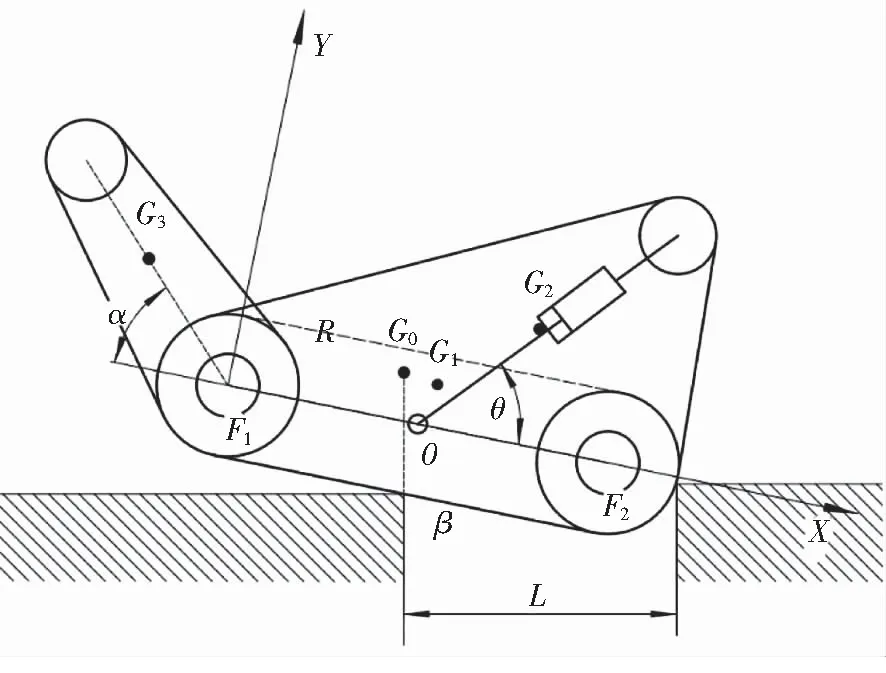
图7 质心未跨过沟壑
由图7可知,可计算出此时的沟壑长度为:
(7)
通过公式(7)可知履带平台的沟壑极限长度为:
(8)
当α=π,θ→0°时,履带平台的总质心达到该位置时的水平位置最大,代入公式(1)可得:

(9)
将公式(9)代入到公式(8)可得:

(10)
把表1相关参数代入公式(10),可得到可跨越最大宽度Lmax=256.678 mm。实际的跨越过程中质心移动和计算会有一定的误差,所以要在后续仿真中进行验证。
3 森林防火机器人履带平台运动学仿真分析
3.1 建立仿真虚拟样机分析平台
在Solidworks中对整个森林防火机器人履带平台进行三维建模,完成对于整个履带平台的整体设计。并进一步通过保存为IGS(Initial graphics exchange specification)中性文件,将装配图导入到Adams(Automatic dynamic analysis of mechanical systems)中。在保证整个模型的运动过程和相关重要参数不变的前提下,为加快运算速度对模型进行一定的简化,将模型的螺栓、轴承及相关的零部件进行删除,并将其所在部位进行处理。其简化后的模型如图8所示。

图8 森林防火机器人履带平台简化模型
模型导入Adams后,先添加重力以及各个零部件的相关质量属性,并为了更好地模拟该森林防火机器人履带平台在搭载设备时的状况,将车主体部分质量定义为120 kg。之后对模型添加固定副、旋转副、接触约束和耦合副,因为履带为柔性体,若将履带模型导入Adams中会使整个约束过程非常繁琐,并且一旦有任意约束出现错误都会影响仿真结果,所以本文最终选择图8的简化模型来进行仿真,并通过耦合副的方式达到履带传动的效果。对履带进行简化仿真主要因为通过其前变形轮和后辅助轮的支撑和变化实现,对履带影响不大,所以可以近似实现履带运行效果。
3.2 仿真分析
为了进一步验证履带平台在林区复杂地面上的越障能力,根据理论计算的结果结合林区的实际工作环境,建立出沟壑和高地台阶模型,通过Adams进行越障的仿真验证,并计算所需的力矩。
3.2.1 攀爬高地仿真分析
参考实际的森林作业环境多为不平的土坡,为方便仿真将其简化为台阶,设置高度为200 mm的单台阶进行仿真,并添加驱动力矩,利用STEP函数对履带平台的攀爬各阶段的变形进行控制,主要分为3个阶段:一为前方辅助变形轮的垂直位置与台阶接触时,辅助变形轮在辅助伸缩杆的作用下顺时针摆动,使履带抬起一定角度,并且后部辅助履带跟着保持其位置;二是当前从动轮接触台阶面后,辅助变形轮在辅助伸缩杆的作用下逆时针摆动使前从动轮着地;最后是当整体总质心达到台阶边缘处时,后辅助履带逆时针转动将后主动轮撑起。通过这3个阶段的履带变化实现整个平台的攀爬过程。其仿真过程如图9所示。

图9 攀爬时履带平台仿真过程图
由图9可知,森林防火机器人履带平台可以成功攀爬200 mm的阶梯,将仿真结果进行数据处理后可以得到履带平台在攀爬过程中其前履带伸缩杆和后方辅助履带的驱动力变化情况,如图10和图11所示。
由图10和图11可知,履带平台在载重120 kg的情况下,其要翻越高地前履带伸缩杆需要大约450 N·m的力矩,后方辅助履带需要大约270 N·m的力矩。履带平台所需驱动力矩小于电机所能提供的最大力矩,满足实际要求。

图10 攀爬时前履带伸缩杆的驱动力矩

图11 攀爬时后方辅助履带的驱动力矩
在攀爬高地时,其重心的稳定性也直接影响履带平台的行进和防火作业,在设计时要使其重心的变化更小。本履带平台在行进时除在攀爬的特殊阶段内有小幅度的重心抬高外,基本保持重心的稳定,为有效地缓解该履带平台重心迅速抬高的问题,本文在实际模型中采用了阻尼弹簧减重轮,通过弹簧阻尼的减震作用可有效地促进重心的下降稳定。
3.2.2 跨越沟壑仿真分析
参照森林环境和上文计算的最大跨越沟壑宽度,设置255 mm的沟壑,添加驱动力矩并利用STEP函数对履带平台的跨越过程进行运动控制,其跨越沟壑的过程如图12所示。

图12 跨越时履带平台仿真过程图
由图12可知,本研究所设计的森林防火机器人履带平台可以成功跨越255 mm的沟壑,对其仿真结果进行后处理,可以得到履带平台在跨越过程中其前履带伸缩杆驱动力变化情况,如图13所示。
由图13可知,履带平台在载重120 kg的情况下,其要跨越沟壑前履带伸缩杆需要大约1 300 N·m的力矩驱动。履带平台所需驱动力矩小于电机所能提供的最大力矩,满足实际要求。
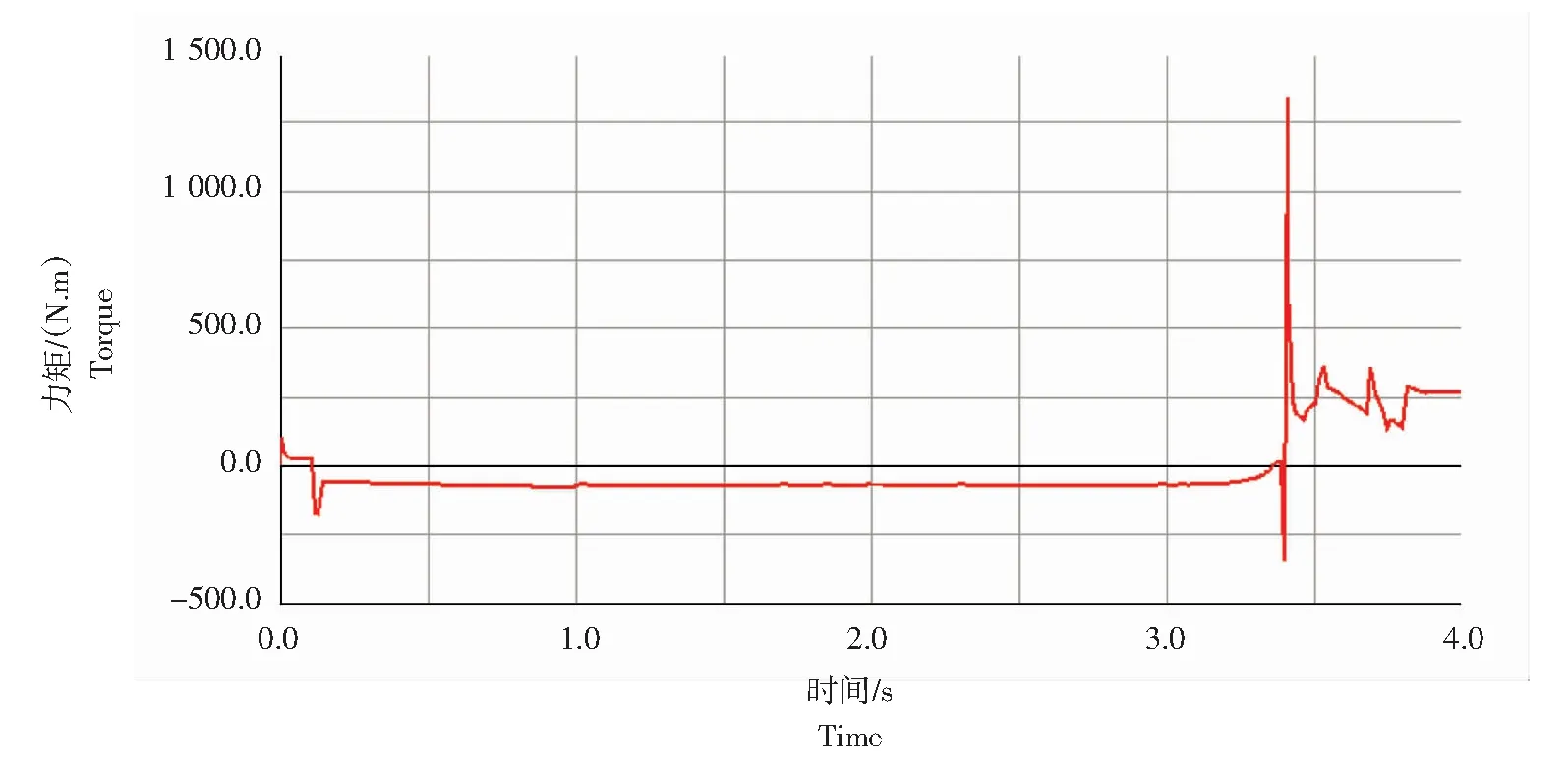
图13 跨越时前履带伸缩杆的驱动力矩
4 结论
本文研究的森林防火机器人履带平台具有较强的地形适应能力和越障能力,通过仿真与数学计算结果进行对比验证,并得到了以下结论。
(1)通过应用椭圆形成原理解决了履带不能连续性张紧的问题,并结合履带摆臂研究出了一种可以应用于林区防火的可变形履带式机器人平台。
(2)建立了履带平台攀爬高地和跨越沟壑的动力学模型,通过运动过程中的几何关系计算出了履带平台可以达到的最大攀爬高度和最大翻越宽度。
(3)通过Adams进行越障的动力学仿真,验证了在林区常见高度坡地上和最宽沟壑的通过性。并分析了运动过程中的驱动力矩,确保了电机选择的合理性,验证了履带平台的越障性能。
