背包式激光雷达滤除低强度点云提取林木胸径
2021-09-30蔡硕邢艳秋端木嘉龙
蔡硕,邢艳秋,端木嘉龙
(东北林业大学 工程技术学院,哈尔滨 150040)
0 引言
精确估测森林结构参数,不仅对全球气候变化研究起着重要的促进作用,更与中国在国际碳贸易谈判中的地位息息相关[1-2]。在过去20年中,激光扫描技术作为一种森林信息收集、参数提取[3-4]与建模[5-6]的重要手段,在森林调查中得到了广泛的应用[7],激光扫描技术可以在一定程度上取代人工作业,对森林进行快速、高精度和无破坏数据采集的特点,极大地提高了森林信息采集的精度与效率[8-10]。背包式激光扫描技术(Backpack laser scanning,BLS)由单人背负,在复杂的林下地形中具有十分优秀的可通过性,这使得BLS具有扫描速度快,覆盖范围广的优点[11],更能通过多角度的数据拼接使得所收集的点云数据结构更加完整,在森林结构参数提取方面有着十分巨大的研究潜力。
胸径提取是BLS在林业中的主要应用方面,Xie等[12]使用BLS提取林木胸径,均方根误差(Root mean square error,RMSE)为2.1 cm,通过点云密度校正最后将RMSE提高到1.5 cm。Oveland等[13]比较地基激光雷达(Terrestrial laser scanning,缩写为TLS)、手持激光雷达(Handheld laser scanner, HLS)和BLS提取胸径的精度,BLS的平均误差0.1 cm,RMSE为2.2 cm,RMSE百分比为9.1%。Cabo等[14]对比BLS与TLS提取胸径精度,BLS提取胸径的RMSE 为1.1 cm,整体偏差为-0.1 cm。Chen等[15]提出了一种利用BLS通过拟合多边形圆柱体计算躯干直径的点云数据来计算圆柱体积的方法,胸径估计值的总体偏差为-1.26 cm,RMSE为1.58 cm。现有的研究主要停留在地势平坦的地方使用BLS,并未对BLS应用于大坡度林地胸径提取精度进行研究,而且BLS与TLS在扫描的数据精度方面有着一定的差距。BLS点云精度的不足主要源自进行点云拼接的误差和在不同精度点云片段融合时所产生的精度损失。由于在林下没有GPS信号,只能使用即时定位与地图构建技术(Simultaneous localization and mapping, SLAM)算法解决这种问题,且目前还没有特别好的SLAM算法能够使BLS点云精度达到TLS一个水平。此外,在传感器与被测点距离较远时,惯性测量单元(Inertial measurement unit, IMU)所计算出位移会被严重放大,这使得BLS所采集的数据片段存在在测量距离较远时误差较大的缺点。当所有点云片段被机械融合之后,高精度的数据与低精度的数据被混合在一起,造成严重的精度损失。在这种情况下,如何使用现有的BLS获取数据来提取出林木真实信息成为需要解决的问题。
为解决BLS提取林木胸径精度低的问题,本研究以广西高峰林场为研究对象,对BLS数据预处理,通过滤除不同点云强度的点云,使用圆拟合算法提取胸径,将试验结果、实测数据及只经过预处理的点云提取胸径的结果进行比对,研究出一种能够在依据现有的提取胸径流程基础上提升BLS数据来提取林木胸径精度的方法。
1 研究区概况与研究方法
1.1 研究区概况
研究区位于广西国有高峰林场,该林场坐落于广西南宁市(108°08′~108°53′E, 22°49′~23°15′N)。高峰林场年降雨量为1 300~1 600 mm。年平均蒸发量为1 500~2 800 mm, 年均相对湿度为81%。年日照总时数为1 500~1 700 h, 是典型的南亚热带季风湿润气候,林场地区土壤厚度平均为60~110 cm[16-18]。高峰林场森林覆盖率达87%,主要树种为桉树(Eucalyptusrobusta)与杉木(Cunninghamia),是我国西南部极具代表性的国有林场。
1.2 样地调查
本研究选择在广西高峰林场界牌分场的3片人工桉树林中进行,森林密度约为700~800株/hm2,林下植被稀疏。样地1地势平缓,坡度为1°,胸径标准差为2.63 cm;样地2地势为缓坡,坡度为18°,胸径标准差为4.51 cm;样地3地势较为陡峭,坡度为28°,胸径标准差为2.7cm。3块样地面积为25 m×25 m。测量人员使用胸径尺手动对样地中的每株单木进行检尺并予以编号,样地起测径阶5 cm,死树不进行编号,之后用全站仪测量单木之间的相对坐标,完成样地的单木定位建图,样地基本情况见表1。

表1 样地基本情况
1.3 BLS数据采集
本研究使用的扫描设备技术参数见表2。
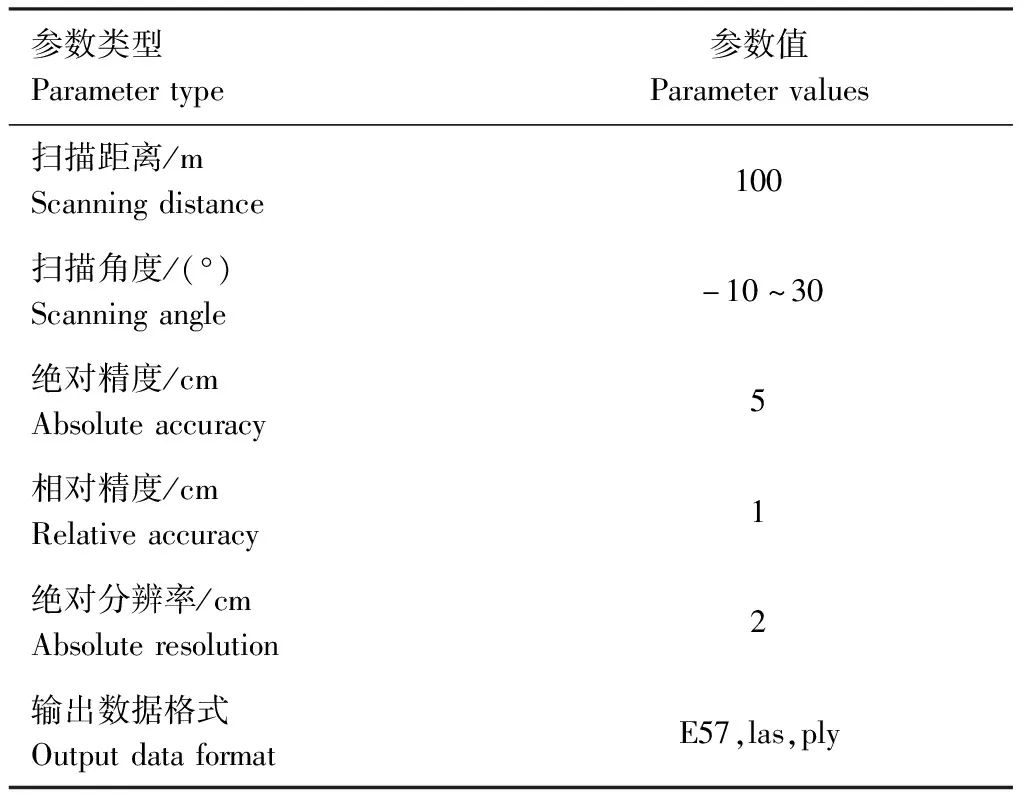
表2 扫描设备技术参数
在研究的每块样地中,背包式激光雷达操作员以样地中心为起点实施“8”字条带式闭合环路扫描,沿样地一侧中点走出,在样地外以尽量与样地边界保持2 m距离为原则绕行至样地另一侧中点返回样地中心,轨迹必须将样地的2个角点包含在内,且不额外跨越样地边界,并在样地另一侧以相同路线进行扫描。行进过程中,尽量保持设备的平稳,避免原地转动及短距离大幅度的位移。本研究采集的BLS数据如图1所示。
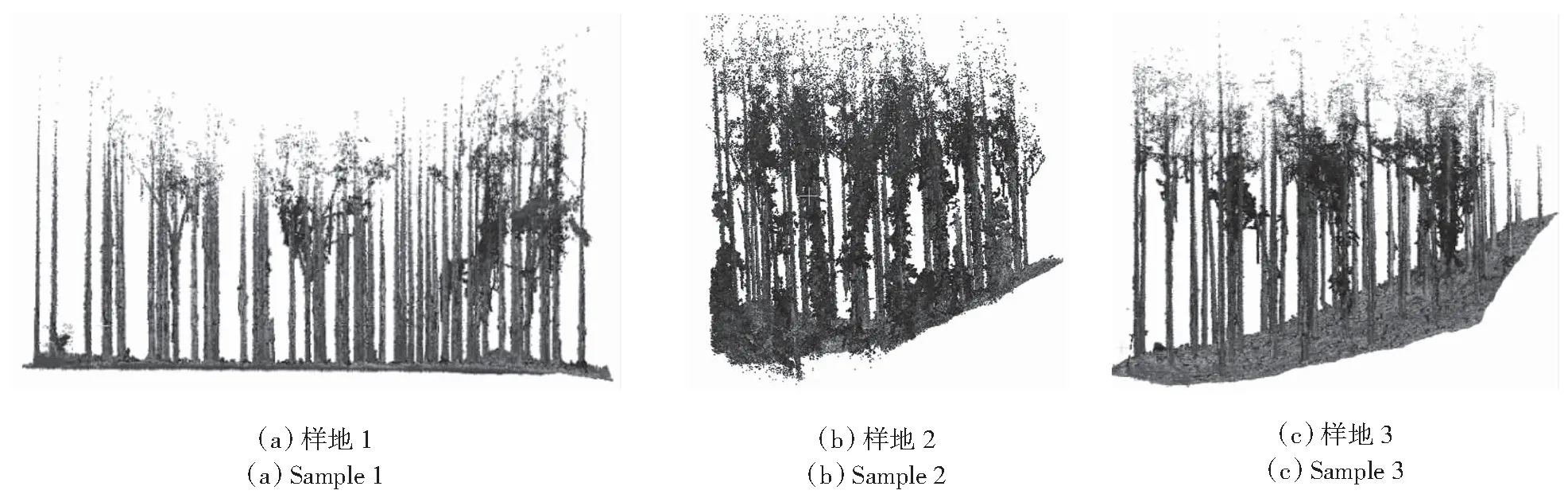
图1 BLS扫描获得的原始点云
1.4 点云数据预处理
将获得的BLS数据中点周围10 cm范围内无其他点作为噪音点剔除,通过不规则三角网算法提取出地面点,该算法能以不同层次的分辨率来描述地形表面,并可以灵活的处理特殊地形。把点云高程值减去对应的地面点高程值,将点云数据进行高程归一化处理。获得的点云生成距离地面2 m高的平行曲面,并以此曲面为中心对点云进行切片,此高度在冠层下且无灌木,能更多避免除树干点云之外的其他点云产生。对切片使用聚类算法进行聚类,并将每一个聚类的水平坐标视为识别出的单木位置,以此生成2D单木位置地图。在此基础上,以单木位置地图为依据,在点云中进行人工确认校对,修正错误的识别结果,以确保后续的胸径提取顺利进行。
依照最终识别后的单木位置地图对树干点云进行分割截取,并予以编号以获取其树干信息。将最终的单木位置地图与样地中全站仪测量的单木位置信息进行旋转匹配,实现人工检尺结果与截取的树干点云片段之间的一一对应。
1.5 点云切片
为了最大限度避免枝叶、灌木等噪声的混入影响点云数据信息质量,导致胸径提取结果偏大,如图2所示,由图2可知树在1.3 m处长出枝叶。拟在胸高周围进行多次切片,因为带有树枝的切片所拟合出的圆直径会明显的增大,严重影响提取胸径的精度,所以选取每组切片点云求得的最小直径作为胸径。考虑到作为试验样地的桉树林在胸高周围断面直径变化不大,本实验在1~1.6 m范围,以0.1 m为步长进行切片,对其进行圆拟合并计算其直径,其中选择拟合直径最小值,将视为胸径提取的最终结果,与人工检尺数据进行参考比对。

图2 胸径处长出树枝的单木点云
1.6 滤除不同点云强度的点云
SLAM(Simultaneous localization and mapping)拼接原理是相邻帧的点云通过找距离最近的特征点匹配完成点云拼接,每一帧的点云中与激光头距离较近的点云占大多数,大部分特征点同样是扫描距离较近的点云,每一帧点云拼接时扫描距离的点云拼接误差较小,随着扫描距离的增加误差会逐渐增大。根据朗伯体散射模型激光方程可简化为[19]:
(1)
式中:Pr为接收激光功率;Pt为发射激光功率;Dr为接收机孔径;R为扫描仪中心到扫描目标点距离;ηatm为大气传输系数;ηsys为扫描系统传输系数;ρ为目标反射率;θ为入射激光与目标表面的法向量之间的夹角,即为激光入射角。
在使用的数据为树干点云情况下,激光雷达数据中点云强度主要受被扫描物体与激光雷达距离影响,在提取胸径时使用到的点云都是树干的点云,因此树干处点云强度只受扫描距离的影响。图3为单木在1.2~1.4 m处的点云切片,点云强度的颜色使用色相饱和度值(Hue Saturation Value, HSV)颜色模型表示,在最外部的点云和最内部的点云颜色为红色,代表点云强度低,在较中间的点云颜色逐渐变为绿色和蓝色,代表点云强度高,最外部的和最内部红色点云是错误描述树真实形态的点云,属于拼接错误的点云,在最理想的条件下,BLS扫描出的胸径切片应该和精度很高的TLS扫描结果相似,只有树干最外圈的一圈点云不是这种接近实心圆的点云。

图3 单木胸径处切片图
为了将影响树木真实形态的点云滤除,提升胸径提取精度,同时避免因为测量员使用BLS在试验样地扫描数据时未将样地边缘的林木近距离扫描,使得样地边缘的林木点云强度比样地中心点林木云强度低,因此从定量的角度进行分析,本研究分别选择所有树木点云强度百分比、单株树木点云强度百分比和点云强度等级3个方面进行滤除提取胸径。
1.7 基于landou-smitch圆拟合算法提取胸径
Landou圆形拟合算法是线性最小二乘算法中的一种,使用非迭代的方法,使计算效率更高,并具有较高的鲁棒性,更适用于BLS点云数据质量较低的情况。该算法是在传统的最小二乘拟合圆的算法基础上进行改变,最小二乘法拟合圆是通过所有点与拟合出来的圆距离平方和最近得到的,其原理是首先假定一个点j作为圆心,并假定一个半径r,其他点通过以假定点j作为圆心,与假定点j之间的距离作为半径做出一个圆,求出这个圆与假定圆之间的面积差,当假定的圆与其他所有点以j构成的圆面积差的和最小,则这个假定的圆成为拟合的圆[20]。将之前每棵单木所有的点云切片使用landou-smitch算法进行圆拟合获取胸径。
2 结果与分析
本研究将基于滤除不同点云强度的点云数据胸径提取结果与人工检尺结果及原始点云胸径提取结果对比,从以下3个方面对该方法在指定样地条件下是否可行进行评价:RMSE(公式中用RMSE);RMSE百分比(公式中用RMSE%);平均误差(η)。具体公式为:
(2)

(3)
(4)

3块样地处理结果见表3。
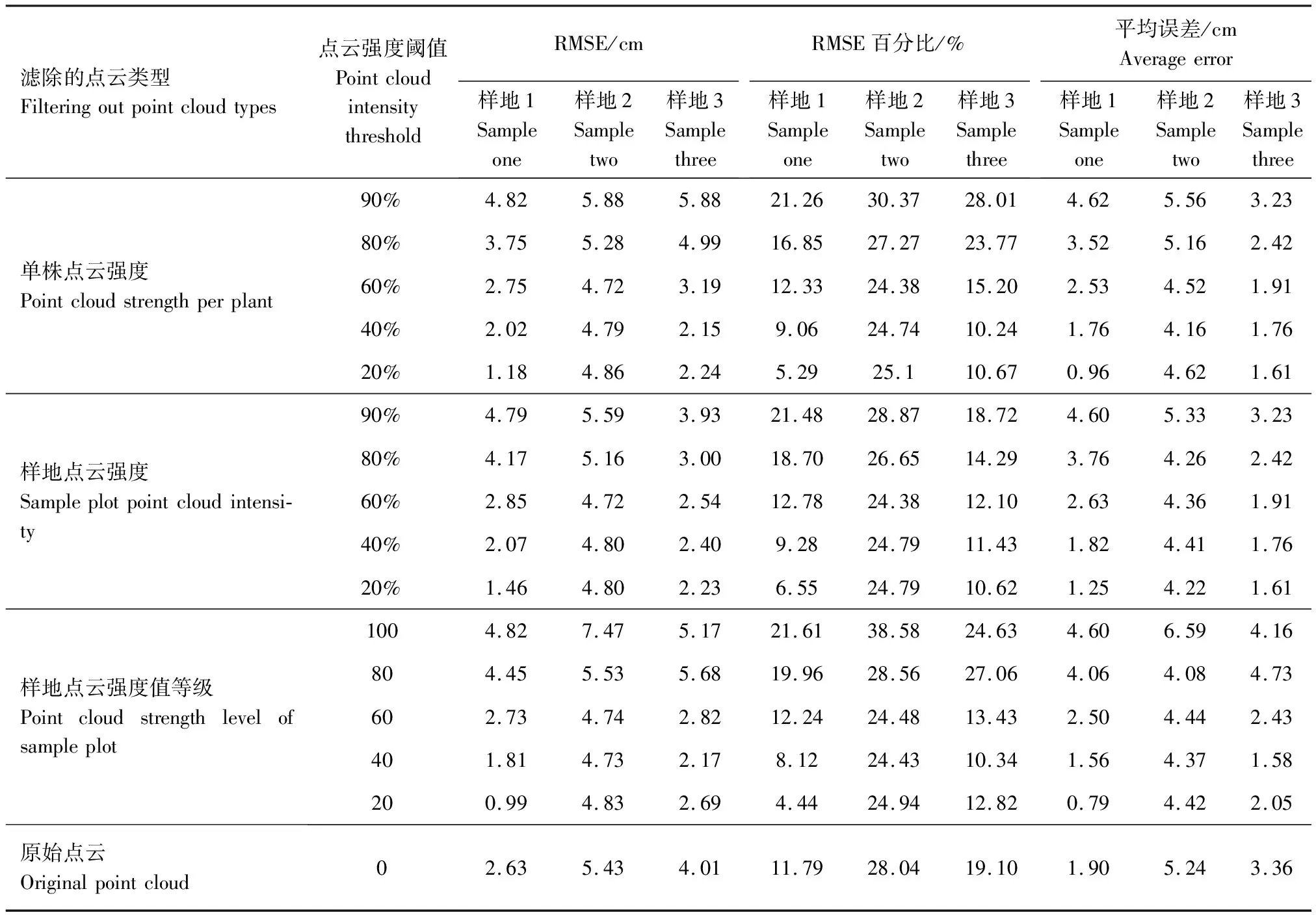
表3 3块样地滤除不同强度点云胸径提取结果
通过观察表3可知,样地1中滤除点云类型为单株点云强度时,阈值为20%时RMSE值为1.18 cm,RMSE百分比为5.29%,平均误差0.96 cm,胸径提取精度最高,阈值在40%以下时胸径提取精度较原始点云提高;滤除点云类型为样地点云强度时,阈值为20%时RMSE值为1.46 cm,RMSE百分比为6.55%,平均误差1.25 cm,胸径提取精度最高,阈值在40%以下时胸径提取精度较原始点云提高;滤除点云类型为点云强度值等级时,阈值为20时RMSE值为0.99 cm,RMSE百分比为4.44%,平均误差0.79 cm,胸径提取精度最高,阈值在40以下时胸径提取精度较原始点云提高。
样地2滤除点云类型为单株点云强度时,阈值为60%时RMSE值为4.72 cm,RMSE百分比为24.38%,平均误差4.52 cm,胸径提取精度最高,阈值在80%以下时胸径提取精度较原始点云提高;滤除点云类型为样地点云强度时,阈值为60%时RMSE值为4.72 cm,RMSE百分比为24.38%,平均误差4.36 cm,胸径提取精度最高,阈值在80%以下时胸径提取精度较原始点云提高;滤除点云类型为点云强度值等级时,阈值为40时RMSE值为4.73 cm,RMSE百分比为24.43%,平均误差4.37 cm,胸径提取精度最高,阈值在60以下时胸径提取精度较原始点云提高。
样地3中滤除点云类型为单株点云强度时,阈值为40%时RMSE值为2.15 cm,RMSE百分比为10.24%,平均误差1.76 cm,胸径提取精度最高,阈值在60%以下时胸径提取精度较原始点云提高;滤除点云类型为样地点云强度时,阈值为20%时RMSE值为2.23 cm,RMSE百分比为10.62%,平均误差1.61 cm,胸径提取精度最高,阈值在90%以下时胸径提取精度较原始点云提高;滤除点云类型为点云强度值等级时,阈值为40时RMSE值为2.17 cm,RMSE百分比为10.34%,平均误差1.58 cm,点云胸径提取精度最高,阈值在60以下时胸径提取精度较原始点云提高。
图4为同株树木在胸径位置滤除不同的点云强度的点云后切片图,图4中点云强度的颜色由HSV颜色模型表示,图4(a)中可以看到在树周围多出来一小块点云,这一部分点云明显会对胸径提取结果产生不好的影响。在图4(b)中滤除单株点云强度最低的20%点云,滤除掉的这一部分点云包含图4(a)中的那一部分低强度的点云,胸径提取的精度提升,而随着滤除的点云数量增多,由图4(e)、图4(f)可见,滤除过多点云导致树木真实形态被破坏,对于提取胸径产生不好的影响。
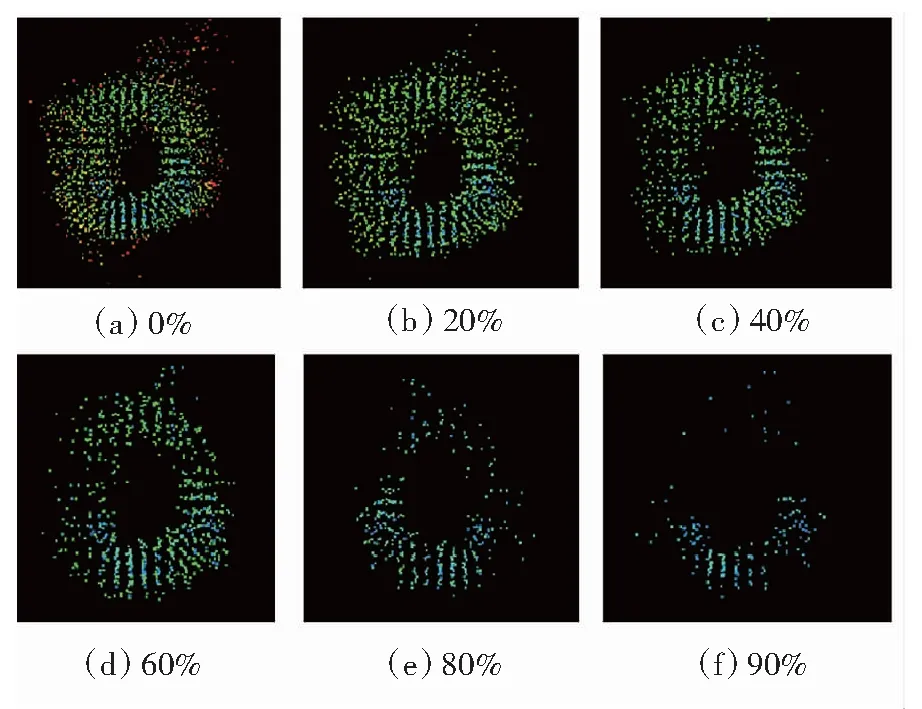
图4 同株树木滤除不同点云强度阈值的点云单木胸径处切片图
3 讨论与结论
3.1 讨论
实验结果如图5所示,由图5可知,滤除不同点云强度的点云会对胸径提取精度产生不同影响,降低胸径提取精度的点云大部分都是点云强度低的点云,这些低点云强度的点云代表在某一帧距离激光头较远处扫描获得的点云。在滤除掉低于一定阈值点云强度的点云会使胸径提取精度上升,能够达到提升胸径提取精度的效果。

图5 3块样地点云滤除RMSE图
为了探究本方法在坡地是否适用,选择了2块坡地与1块平地进行试验,3块样地均能通过滤除一定点云强度的点云来提升胸径提取精度,且提升的精度效果较好。平地样地中,从百分比滤除点云来看无论是从整体点云入手还是从单株点云入手,均在滤除掉点云强度最低的20%点云时胸径提取精度最高,在从点云强度等级来看,在滤除强度值等级20以下的点云胸径精度提升最高。在缓坡样地中,从百分比滤除点云来看无论是从整体点云入手还是从单株点云入手,均在滤除掉点云强度最低的60%点云时胸径提取精度最高,在从点云强度等级来看,在滤除强度值等级40以下的点云胸径精度提升最高。在陡坡样地中,从整体点云入手,滤除掉点云强度最低的20%点云时胸径提取精度最高;从单株点云入手,在滤除掉点云强度最低的40%点云时胸径提取精度最高,在从整体点云强度等级来看,在滤除强度值等级40以下的点云精度提升最高。当通过此方法使胸径精度提升到一定程度时,再继续滤除点云强度更高的点云会使代表树木真实形态的点云消失,导致胸径提取的精度下降。BLS数据滤除的过程以降低数据的完整性,降低数据的冗余度为代价,保证了可用于胸径提取的有效范围内点云数据的质量。
设定的点云强度阈值受多种因素影响,3块样地在过滤掉相同强度阈值的点云时对胸径精度影响并不相同。因为在地势平缓的样地中,测量员便于行走,背包式激光雷达晃动较小,点云配准精度较高,能够真实表示树木形态的点云比例较多,所以胸径提取误差较小。本实验中所使用的背包式激光雷达的扫描高度与人体身高十分接近,因此在枝下高较低或林下灌木较为茂盛的样地中进行扫描,很容易因为枝叶剐蹭造成传感器的损坏。这一定程度上可能会对点云数据的采集与拼接造成影响,从而导致胸径提取结果的精度下降。
本实验方法在平地样地可使胸径提取的RMSE达到0.99 cm,较于Oveland等[13]平地使用BLS提取胸径RMSE为2.16 cm和Chen等[15]RMSE为1.58 cm有所降低,在坡地样地中同样能有效地降低胸径提取的误差,此方法能够有效地在现有的方法上提高胸径提取精度。实验结果证明,针对背包式激光雷达点云数据的数据特征,通过滤除低强度点云并进行圆拟合来提升胸径提取精度方法是可行的,能够解决在坡地方面胸径提取精度较低的问题。
3.2 结论
本研究使用背包式激光雷达在广西高峰林场界牌分场的人工桉树林滤除不同点云强度的点云进行胸径提取,通过与人工实测数值及保留原始点云数据提取到的胸径比对,对点云强度对胸径提取精度进行研究,得出以下结论。
1)背包式激光雷达数据中点云强度值比较低的点云会对胸径提取误差增加一倍以上,滤除这些低点云强度的点云能够增加胸径提取的精度,3块样地在滤除样地单株点云强度值最低的40%点云及点云强度值等级低于40的点云时,胸径估测结果精度均能提升,较好地解决背包式激光雷达在林业中胸径提取精度不高的问题。
2)由于测量人员在林下条件复杂的地势无法平稳行走,所获得的数据质量比平地要差,设备在测量时抖动越厉害,点云配准误差越大,影响树木真实形态的低质量点云数量较多,使用此方法滤除点云强度的阈值需设置更高。
从本研究结果上看出还存在需要解决的问题,在下一步工作中完成。比如此次选择了林下植被较为稀疏的林分进行实验,然而野外实际调查过程中,不可避免地会遇到林下环境较为复杂,穿行不便的情况。因此,背包式激光雷达在枝下高度较低、林下灌木较为茂盛的林分中,点云强度对胸径提取精度的影响未能探究。还比如不同型号的BLS的算法不同,获得的数据质量有差距,降低胸径提取精度的阈值是否相同未能研究。
