基于NFC的无源无线扭矩测量系统*
2021-09-29赵永峰赖富文王文廉
赵永峰,王 玉,赖富文,王文廉*
(1.中北大学仪器科学与动态测试教育部重点实验室,山西 太原 030051;2.中北大学电子测试技术国家重点实验室,山西 太原 030051;3.中国人民解放军 63853部队)
扭矩在动力学中占有举足轻重的地位,是工业动力传递的重要参数之一,所以扭矩的精准测量显得尤为重要。目前,测量扭矩的方法多种多样,大致分为有线测量和无线测量,不论是有线还是无线测量,都面临一些大大小小的问题。
有线测量要避免的一大难题就是弹性轴在转动的过程中导线的处理。目前的处理方式是加入一个集流环,弾性轴转速低的情况下有较好的性能,但是当弾性轴转速偏高时,集流环与弾性轴之间的摩擦损耗引起接触电阻变化,产生噪声干扰和零漂,对信号有很大的影响,导致采集到的数据误差较大[1]。
无线测量不论是弾性轴转速快慢,都有很好的测量精度,优于集流环式;但是目前的无线测量系统包括信号放大电路、调理电路、射频发射电路、射频接收电路、电源管理电路和调制解调电路,整个系统电路复杂,价格昂贵,检修困难[2-4]。
为了使测量系统达到更高的集成度和测量精度,采用NFC(近场通信)技术作为无源无线扭矩测量系统的数据传输媒介。NFC技术是由非接触式射频识别(RFID)演变而来,NFC采用电磁耦合感应技术,电磁场频率是13.56 MHz,读写控制端用13.56 MHz信号激励天线,产生磁场,通过近场耦合,将能量传递给目标,目标对磁场进行调制,将数据返回给发起设备完成通信;NFC技术凭借其通信稳定、传输速率快、建立联系时间短、受环境影响小等优势发展迅猛,一枚0.4 cm×0.4 cm的NFC芯片已经在内部集成了微型MCU、信号放大电路、调理电路、射频发射电路、电源管理电路和调制解调电路,此外还有能量收集功能,为外部传感器供电[5-11]。目前国内外对NFC多处于静态标签的研究应用,无传感器,多采用其ISO14443A/B协议做身份识别以及储存固定信息;本系统采用其ISO15693协议,连接传感器,实现动态数据传输。
基于NFC的无源无线扭矩测量系统采用经典的应变式扭矩测量法,将箔式应变计栅丝方向与弾性轴圆柱面的母线呈45°或135°方向,每隔90°位置粘贴1片应变计,共粘贴4片组成全桥电路,当弾性轴受扭时,应变计产生形变,应变计电阻的变化通过电桥输出与外加扭矩成正比的电压信号,通过计算便可得到外加扭矩的大小;应变式扭矩测量法电路设计简单、测量精度高,一直在广泛使用[12-14]。
1 系统设计
1.1 系统工作原理
图1描绘了基于NFC的无源无线扭矩测量终端的工作原理。一共分为五个部分,包括NFC天线、NFC芯片(RF430FRL152H,ISO15693协议),调谐匹配电路、滤波放大电路以及全桥采集电路。将读写控制系统的天线靠近测量终端的天线,通过电磁耦合,终端系统被激活,经过极短暂的时间后两者建立连接完成;读写控制器通过空中编程的方式发送指令给测量终端,启用内部14-Bit Sigma-Delta ADC(SD14)、16-bit CRC、2KB-FRAM、Amplifier以及Power Supply System(包括能量收集功能);当转动弾性轴,恒流源式全桥采集电路采集输出电压,采集到的电压信号经放大滤波后由SD14(VREF=0.9 V)将数据转换成数字量存在FRAM中,读写系统通过向终端发送循环读取指令来访问FRAM中的数据,并将数据发送给PC端进行数据直观反映。
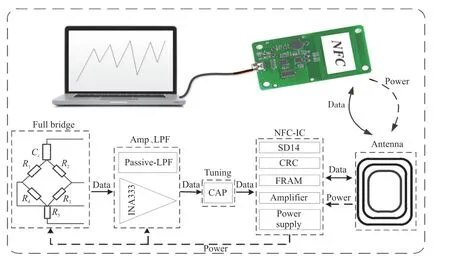
图1 NFC无源无线扭矩测量系统原理图
1.2 NFC系统设计
NFC系统是整个系统的核心,因此先设计完整的NFC系统来保证通信的稳定性。
图2是NFC系统电路图,除了NFC芯片及其外围电路外还有放大滤波电路。系统使用二阶放大电路,第一阶是NFC芯片内部提供最大8倍的放大电路,第二阶放大电路采用超低功耗低噪声精密仪表放大器INA333,该芯片最大偏移电压25μV,工作电压1.8 V,静态电流50μA,最大增益1 000,轨到轨输出,能保证出色的精度。
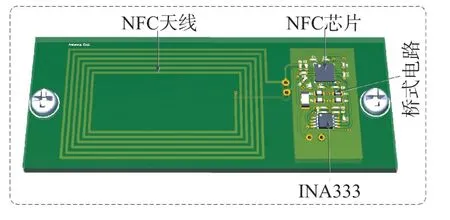
图2 NFC系统电路图
1.3 NFC天线设计
NFC工作在13.56 MHz,属于HF波段,需要使用线圈环路天线。线圈天线最重要的参数是其等效电感值,为了更好的匹配电容,其值通常在0.5μH~3.0μH之间。在设计天线之前通常先规划好预设计天线的形状、尺寸、线宽和圈数等,利用经验公式计算出等效电感值,再利用HFSS软件仿真,之后设计出实际天线用矢量网络分析仪测量实际电感值。
预设一块矩形天线,如图3所示:匝数N=6、平均宽度w=37 mm、平均高度h=19 mm、轨迹宽度a=0.5 mm、真空磁导率μ0=4×10-7H/m、校正因子p=1.8,根据经验公式:
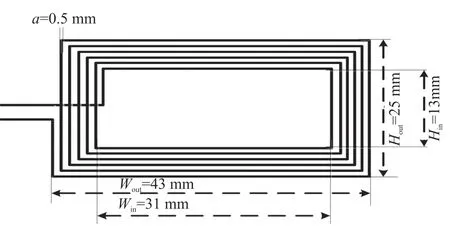
图3 矩形天线

计算出等效电感值Lest=1.776μH,符合设计要求。
图4为HFSS对预设天线的阻抗仿真图,13.56 MHz频率下的阻抗值 为:Z=(1.436 2+j151.563 4)Ω,计算出仿真天线的电感值为:Lsim=1.779μH,可以发现Lsim和Lest相差非常小。
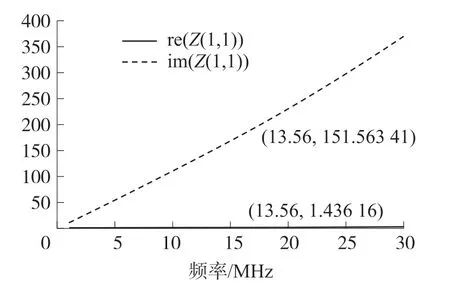
图4 天线仿真阻抗值
按照预设天线尺寸做成实际的PCB天线,如图5所示,使用矢量网络分析仪测量实际天线,Smith圆图在光标‘1’对 应13.56 MHz的 电 感 值 为Lreal=1.840μH,与Lest、Lsim均相差很小;Smith圆图在光标‘2’对应天线的自谐振点,频率为70.156 MHz,可推出天线的寄生电容CPara=2.797 pF,已知NFC芯片的输入电容为Cin=35 pF,由公式:

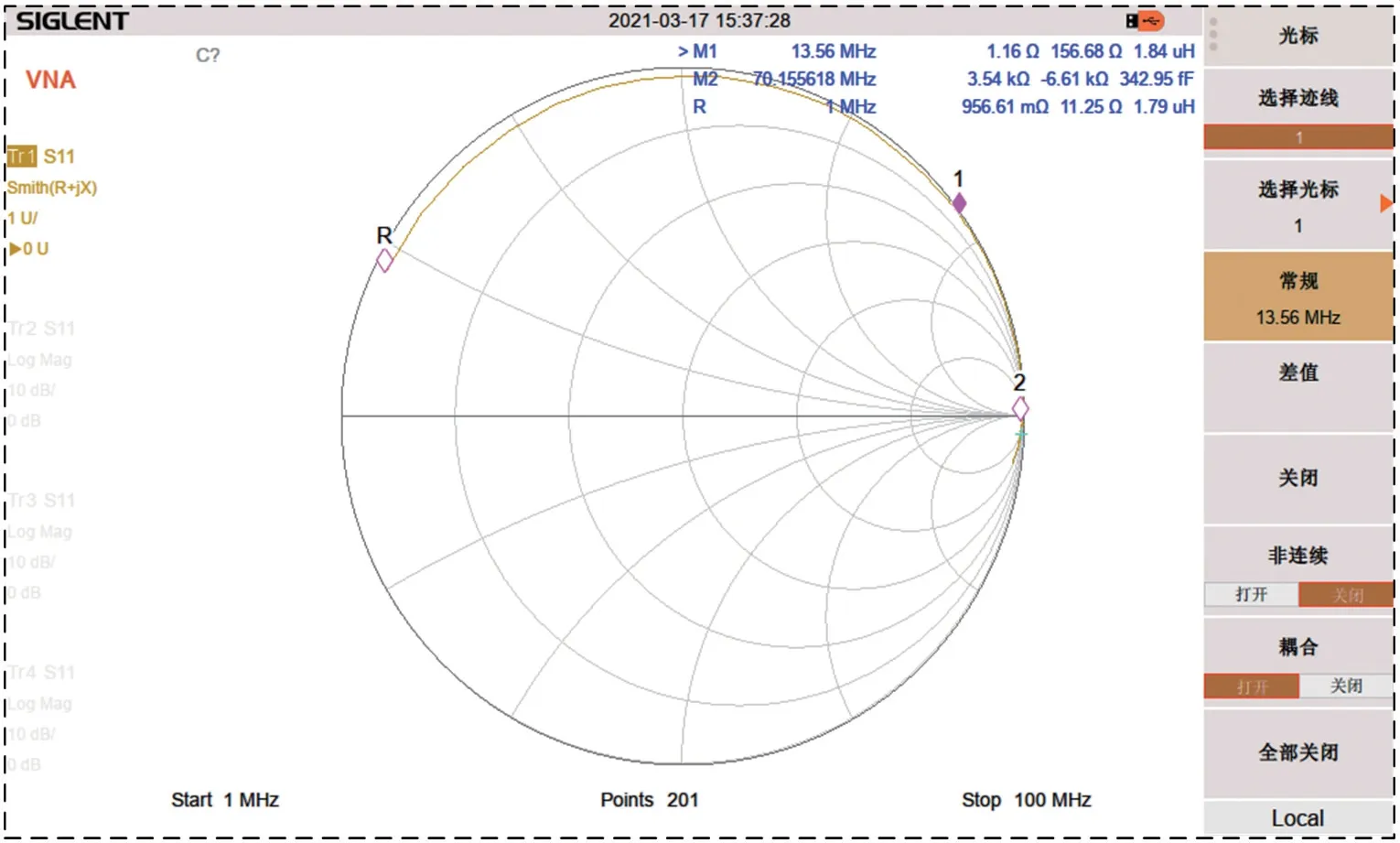
图5 矢量网络分析仪实测的Smith圆图
计算出需要匹配的谐振电容为CRES=37.072 pF,以此构建谐振匹配电路。
1.4 应变系统设计
应变系统包括弾性轴和应变计。
选取一截直径20 mm、长30 cm的45#实心钢柱作为弾性轴,根据公式:
计算出所选弾性轴可承受最大安全扭矩为M=161 N·m。(D为弾性轴的直径、Wp为轴截面的抗扭模数、M为轴上扭矩、[]为最大许用应力、τmax为轴截面上的最大剪应力、δ0.2为屈服强度、ns为安全系数取2)
弾性轴受扭发生应变时,横截面会受到剪应力,这个力在轴中心处为零,在轴表面最大,因此如何粘贴应变计变得很重要。如图6所示,将阻值为1 kΩ的箔式应变计栅丝方向与弾性轴圆柱面的母线呈45°或135°方向,每隔90°位置粘贴1片应变计,共粘贴4片组成全桥电路;此全桥电路有温度补偿功能,可消除导线的温度影响,可消除弯曲应变,可消除压缩(拉伸)应变,输出精度是桥式单臂电路的4倍。根据广义胡克定律:

图6 应变计粘贴图

式中:σ1=τmax、ε1=ε3=-ε2=-ε4得到剪应力和应变的关系:

结合公式:

推出扭矩与电阻变化量的关系:


式中:E为弾性轴的弹性模量、μ为弾性轴的泊松比,可知扭矩可以通过应变计电阻的变化来测量。
2 系统标定
首先要对终端系统进行实验标定,根据应变计的测量原理可知其有效性对静态和动态负载都相同,所以采用静态试验标定法。如图7所示将弾性轴的一端固定防止自由旋转,使用一根质量均匀臂杆固定在弾性轴的一端,并使臂杆呈水平状态,臂杆下挂精准砝码,通过外加机械构件发生转动产生可控扭矩,施加扭矩包括臂杆长度与砝码重力的向量积以及臂杆自身重力产生的扭矩,通过增加/减少砝码来增加/减少所施扭矩,利用读写控制端实时读取输出电压的值,记录所施加扭矩大小及其对应的输出电压值。

图7 静态标定示意图
为了保证测量终端系统能与读写控制端实时保持稳定通信,用吸波材料(铁氧体膜)来减小金属的涡流效应。NFC系统与读写控制端的最大感应距离是10.5 cm,最大稳定通信距离是9.5 cm;当与弾性轴和桥式电路组成测量终端后,如图8,测量系统PCB与读写控制端最大稳定通信距离是4.5 cm。
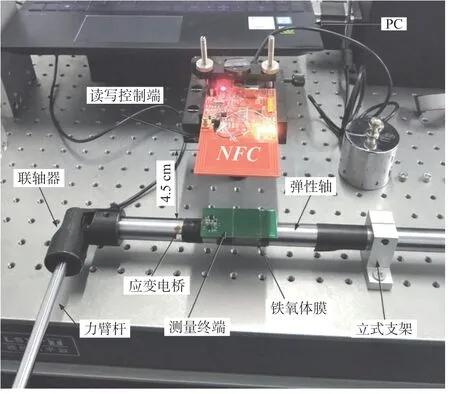
图8 标定实验照片
3 实验与数据分析
采用直径10 mm、长100 cm的45号钢柱作为均匀力臂杠杆,力臂杠杆自身重力产生的扭矩要计算在内(12.5 N·m)。测试时,通过增加砝码的个数实现扭矩的加载,通过相反过程来实现扭矩的卸载,以200 g的砝码为间隔进行15个点的标定(量程42.5 N·m)。从读写控制端记录对应的输出电压值,重复三次实验,将每个标定点的实验数据取平均值[15-16]。实验数据如表1。
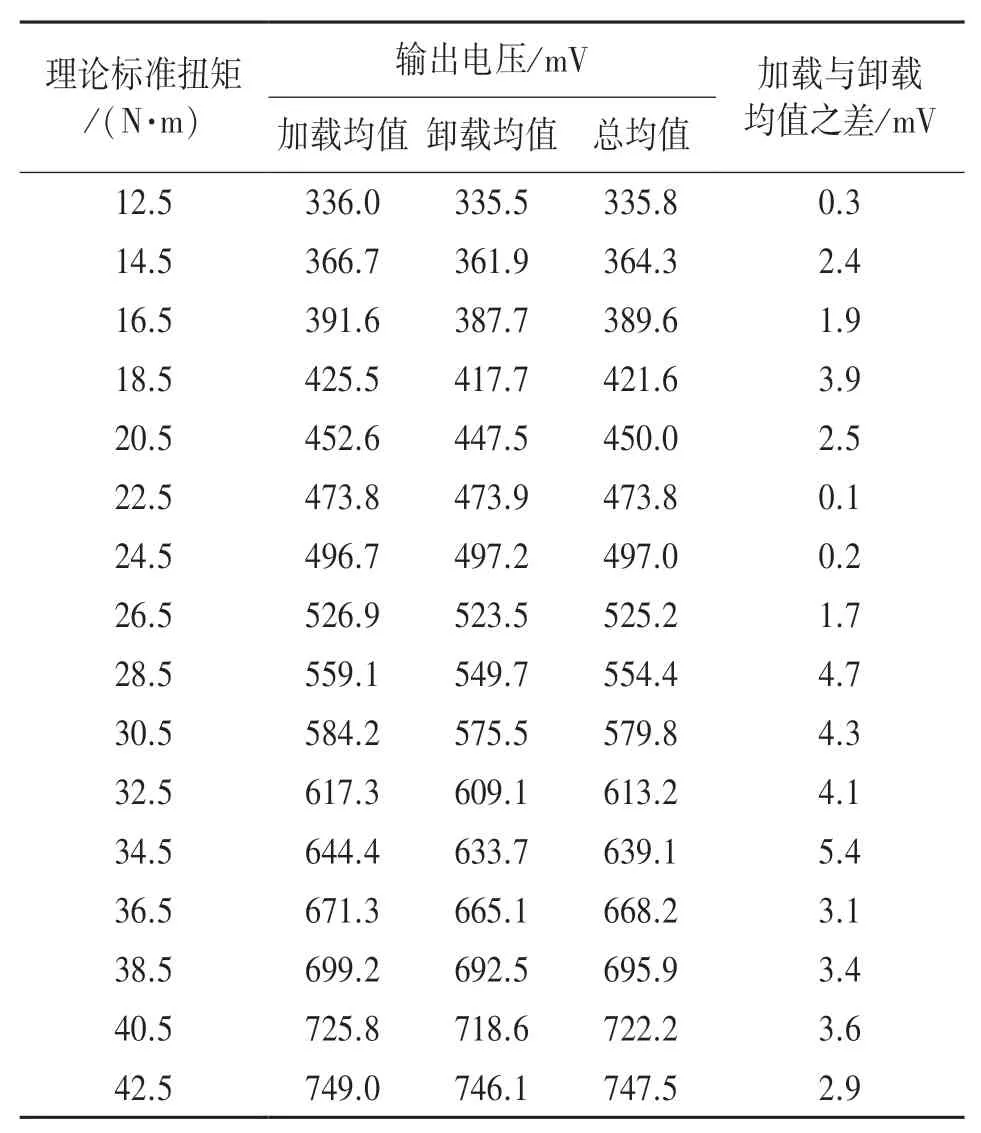
表1 实验数据(输出电压)
将三次实验输出电压的‘总均值’输入MATLAB作为纵坐标,将理论标准扭矩作为横坐标,如图9(a)所示,利用最小二乘法得到扭矩和输出电压值的拟合特性曲线为:y=13.697 7x+165.560 0,x表示扭矩,y表示输出电压值。将输出电压根据拟合曲线转化为扭矩,转化结果如表2。

图9
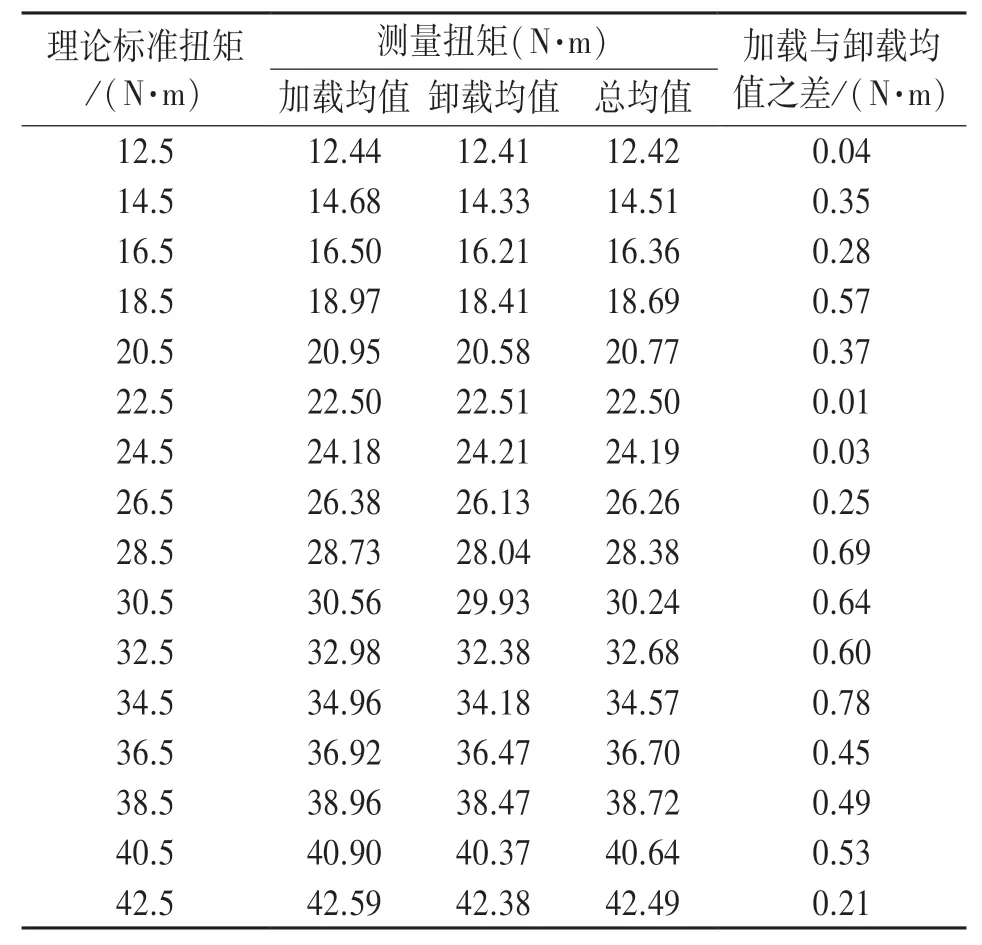
表2 实验数据(测量扭矩)
分析、计算和评估扭矩测量系统的各项指标如下:
用MATLAB分别描绘实验数据的线性度、迟滞性和重复性如图9(b)、9(c)和9(d)通过分析和计算可知此测量系统各项性能指标均符合规范,不仅结构和选材得当,而且具有高测量精度。
4 结论
本文通过对目前扭矩测量系统的研究分析和总结,提出了基于NFC的无源无线扭矩测量系统,通过对系统的构建设计、仿真调试、实验和数据分析验证了系统的可行性。本系统通过NFC技术作为扭矩测量的媒介,在保证数据通信稳定和快速的前提下不仅避免了传统有线扭矩测量系统磨损带来的较大误差,而且因其高度集成化在电路结构上优于一般的无线扭矩测量系统。基于NFC的无源无线扭矩测量系统不仅无线,而且无源,在某些特殊环境中可以长期使用,解决更换电池的不便。
