船载角跟踪系统船摇模拟器设计*
2021-09-29兰宏志
兰宏志
(中国西南电子技术研究所,成都 610036)
0 引 言
舰船在海洋中航行会受到海洋气象环境的影响发生摇荡,如果能够依据航海数据分析建模,模拟舰船等设备在受到风浪等海洋气象环境影响时船身发生摇荡对角跟踪系统的影响,并在系统设计中预先采取相应措施加以应对,提前验证并改善系统的适应能力,可以有效规避真实场景下不希望出现的情况[1]。如何逼真地模拟复杂海洋环境中发生船摇时对角跟踪系统性能的影响,已公开的资料很少见到相关论述,市面上也很少见到相关产品。
本文根据横摇、纵摇、艏摇等船摇信息建模,设计了一种船载角跟踪系统模拟器,通过对无船摇影响的位置矢量进行欧拉角旋转,求得受船摇影响的位置矢量,再利用矩阵变换解算出受船摇因素影响的仿真参数,实现船载角跟踪系统模拟器对船摇的模拟。
1 船载角跟踪系统船摇模拟的原理及组成
1.1 模拟船摇的原理
角跟踪系统的机理是,天线馈源输出的和差信号幅度差反应了天线指向与目标之间的角度差,船载设备会因船体的摇荡影响天线与目标的对准[2]。船载角跟踪系统模拟器接收操作界面输入、预存经验数据或者从陀螺仪实时送来的船摇信息[3],根据欧拉角旋转求出受船摇影响的仿真参数,通过数控衰减器及相位调节器按天线方向图来控制和差信号的幅度(功率)和相位,模拟产生在船摇影响下天线指向与目标之间的角度差对应的和路与差路信号之间的幅度及相位关系,也即模拟天伺馈产生的和差信号,从而模拟船摇对其跟踪性能的影响,其原理框图如图1所示。

图1 船载角跟踪系统船摇模拟器组成及原理框图
1.2 船摇模拟器组成
船载角跟踪系统船摇模拟器由模拟监控软件和角跟踪系统模拟器硬件组成,如图1所示。模拟监控软件根据船载角跟踪系统模拟器操作界面输入、预存经验数据录入或者从陀螺仪实时接收的船摇信息进行坐标转换,把大地系轨道数据转换为甲板系轨道数据,将船摇影响叠加进模拟轨道数据中,求得受影响的距离、速度、方位角、俯仰角、方位角速度、俯仰角速度及功率等仿真数据,实时控制角跟踪系统模拟器硬件单元,使船载角跟踪系统模拟器以甲板系模拟的数据始终对应以大地系为参考的轨道数据,实现船摇模拟。
2 船摇模拟建模
2.1 无船摇影响的轨道参数

(1)
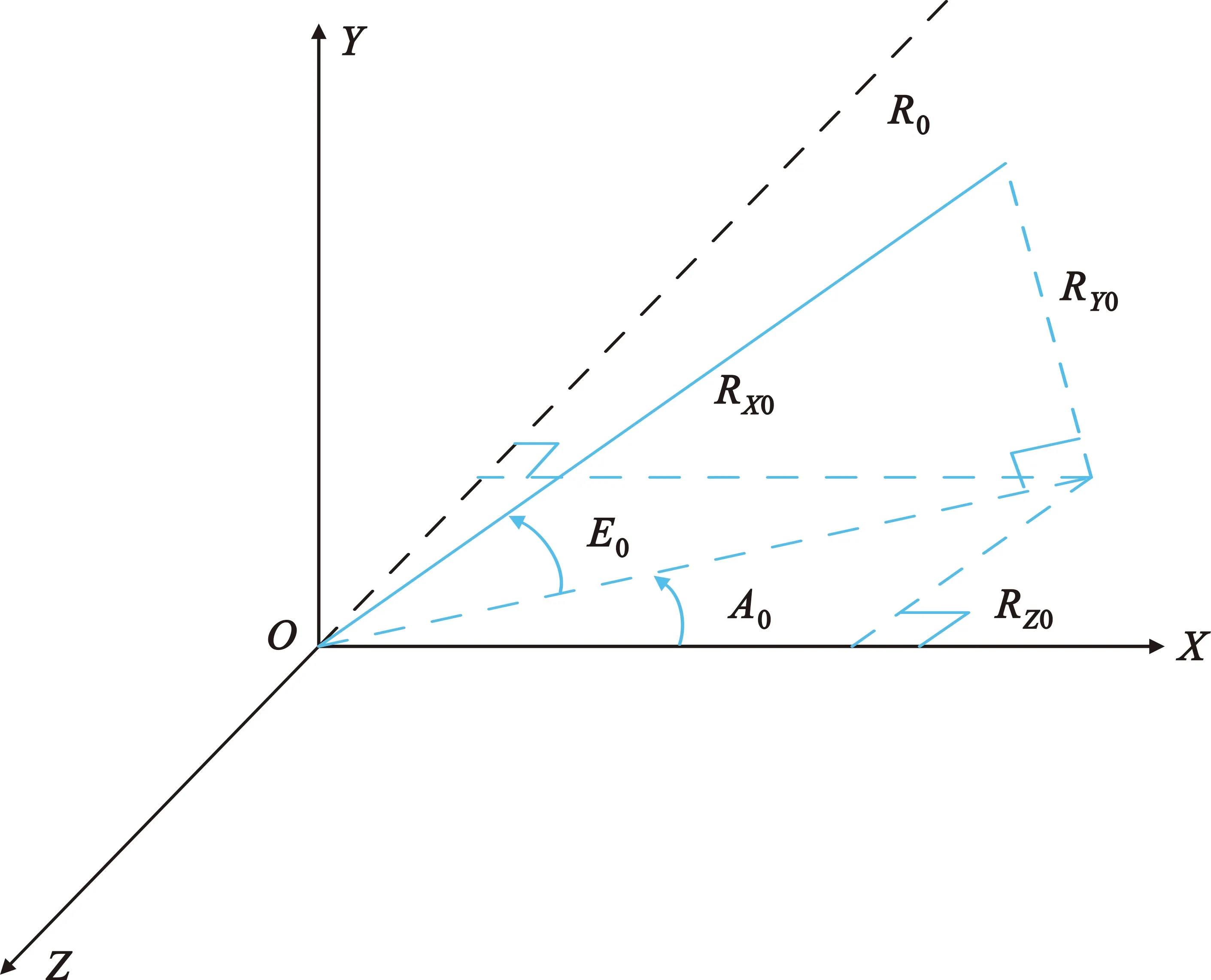
图2 R0与A0、E0的关系
用矩阵表示为
(2)
对r0求导得到航天器在未考虑船摇时甲板坐标系下的速度矢量v0,即
(3)
设

2.2 有船摇影响的轨道参数
若考虑船摇的影响,设βS为艏摇、θS为横摇、αS为纵摇,将航天器无船摇的位置向量r0=(RX0,RY0,RZ0)T进行欧拉角旋转,得到航天器在船摇影响下的位置向量rS=(RXS,RYS,RZS)T。
用矩阵描述为
(4)
(5)
(6)
T=TθTαTβ,
(7)
(8)
rS=Tr0。
(9)
根据位置向量rS=(RXS,RYS,RZS)T,可计算出船摇影响下需模拟的径向距离RS、方位角AS、俯仰角ES分别为
(10)
(11)
(12)


根据某时刻航天器相对于测量船的径向距离RS,自由空间损耗与距离的平方成正比,与波长的平方成反比,可计算信号自由空间损耗LS为
(13)
式中:LS径向距离RS以m为单位,频率f以Hz为单位。
3 船摇模拟设计及工程实现
舰船在大海中航行会受到不同海况的影响,发生不同程度的摇荡,一般以横荡、纵荡、垂荡、艏摇、纵摇、横摇等6个自由度来描述,且摇和荡总是同时发生的[4]。先行经验表明横荡、纵荡、垂荡对船载角跟踪系统跟踪性能影响较小,工程上通常以艏摇、纵摇、横摇3个参数来描述海况对船载角跟踪系统跟踪性能的影响。船摇模拟器受影响的相关要素主要体现在和差信号功率及相位两个方面。
3.1 船摇影响下的和差信号功率及相位
3.1.1 和差信号功率变化
模拟器监控软件根据轨道根数和船摇信息实时计算出某时刻需要模拟的俯仰角ES、方位角AS,从天馈系统天线控制单元(Antenna Control Unit,ACU)接收当前天线指向(Et,At),计算得到俯仰角度差ΔE和方位角度差ΔA,即
(14)
角跟踪性能模拟时,根据角跟踪天线和方向图F∑(E,A)、俯仰差方向图FΔE(E,A)和方位差方向图FΔA(E,A),推算得到以dB为单位的和路、差路俯仰、差路方位信号的天线增益值G∑(ΔE,ΔA)、GΔE(ΔE,ΔA)及GΔA(ΔE,ΔA)。
若航天器发射的下行信号功率为Pt,则该下行信号经过自由空间损耗及地面角跟踪天线后,到达测量船的和路信号功率P∑、差路俯仰信号功率PΔE、差路方位信号PΔA分别为
(15)
模拟器的主要功能都是在中频后的数字信号上实现的[5],动态范围内的下行输入信号通过模拟器信道变频、自动增益控制(Automatic Gain Control,AGC)放大到AD采样前,已是功率恒定的中频信号,假设其功率为PI,和差支路归一化增益为K0,以中频信号功率PI为基准,由增益值换算成和差路信号衰减值,通过控制和差支路的数控衰减器调节和差路信号幅度,模拟产生和路信号功率P∑、差路俯仰信号功率PΔE、差路方位信号功率PΔA。
模拟和差信号支路的数控衰减量按下式计算:
(16)
式中:a∑、aΔE、aΔA分别为模拟和路、差路俯仰、差路方位信号的数控衰减量。根据式(14)、(16)设计角度差对应衰减值的查找表,用受船摇影响的目标轨道方位角、俯仰角与当前天线指向之间的角度差访问查找表,控制和差支路的功率按照对应的方向图变化,产生模拟的角跟踪信号。
3.1.2 和差信号相位
为了模拟角跟踪系统可能出现的相位异常或者不同极性的反馈环路,模拟器设置相位调节环节。一般角度正偏模拟输出负的误差电压,对于俯仰差和方位差信号模拟支路的0/π移相值而言,若方位误差角ΔA>0或俯仰误差角ΔE>0,则方位支路相位调节器φΔA=0或俯仰支路相位调节器φΔE=0;若ΔA<0或ΔE<0,则φΔA=π或φΔE=π。反之,若角度正偏模拟输出正的误差电压,当方位误差角ΔA>0或ΔE>0时,方位支路相位调节器φΔA=π或俯仰支路相位调节器φΔE=π;若ΔA<0或ΔE<0,则φΔA=0或φΔE=0。
角跟踪模拟监控软件按一定模拟时间间隔Tsamp计算角跟踪模拟控制参数,数据更新时间一般为50 ms(即速率20次/秒)。为了模拟曲线更加平滑,可以根据拟合数据或者按照某种规则(例如拉格朗日插值法)插值,使模拟时间间隔更小,以提高跟踪精度,便于跟踪系统快速收敛。
3.2 船摇模拟器工程实现
工程上按图1所示的原理设计船摇模拟器,实现船摇模拟。船摇模拟方式有手动模拟、理论轨道模拟、加载特定轨道模拟、轨道根数换算成仿真参数模拟等[6],根据船摇信息与导调系统实时发送的(或者本地预存的)轨道数据解算,生成受船摇影响的仿真参数(距离、速度、方位角、俯仰角、俯仰角速度、方位角速度、功率等),实时求出需要仿真的天线角度与当前天线指向角度的差值(俯仰角度差、方位角度差);利用角度差访问按实际天线方向图预先设计的角度差对应和差相位及衰减值查找表,控制角跟踪模拟单元按照和差方向图所描述的特性进行相位和功率变化,即可产生和、差两路信号进行角跟踪特性模拟,其仿真参数实时反映了船摇信息对系统跟踪性能的影响。
船载角跟踪系统模拟器监控软件根据第2节船摇模拟建模,计算出船摇影响下的航路数据,如图3和图4所示。

图3 轨道根数计算

图4 带船摇的航路数据
通过B码统一系统时间,可以进行时间符合模拟。轨道根数解算生成受船摇影响的仿真参数带有时标,有多个可以开始模拟的起始点(出地平线时刻)T0。挑选某个T0与当前B码时间比较,如果当前B码时间与T0刚好吻合,立即启动模拟开始;如果当前B码时间还未到T0时刻,等待B码时间到达T0时刻,立即启动模拟开始;如果当前B码时间已过T0时刻,自动搜索本模拟段中与当前时刻对应的时间点的数据开始模拟。
4 试验验证
船载角跟踪系统船摇模拟器参加船载系统全系统验证试验,先用理论轨道对角跟踪系统校相,标校角误差灵敏度和误差电压极性;系统标校完成后,天线置仿真轨道起始模拟点,运行仿真轨道开始模拟,按第2节所述船摇模拟方法多次进行全系统试验,分别在有无船摇及是否采取对应隔离措施的情况下比对试验,其跟踪性能模拟效果如图5~7所示。

图5 模拟角跟踪性能受船摇影响示意图

图6 隔离船摇时角跟踪性能模拟实测图

图7 未隔离船摇时角跟踪性能模拟实测图
试验结果表明,加船摇模拟后未进行船摇隔离补偿对消,其跟踪系统反复振荡,无法收敛,跟踪性能模拟效果示意图如图5中黑色虚线所示;进行船摇模拟,在系统中进行相应的船摇隔离补偿对消,角跟踪系统能快速收敛,跟踪性能模拟效果示意图如图5中蓝色实线所示。
图6和图7是船载角跟踪系统船摇模拟器进行船摇模拟时,系统是否采取船摇隔离补偿对消措施角跟踪系统性能模拟实测效果图。
5 结束语
本文通过船摇模拟方法建模、模拟器设计及在船载系统上全系统试验,对船载角跟踪系统模拟器模拟船摇方法进行探讨,分析验证了船摇中艏摇、纵摇、横摇等对船载角跟踪系统的影响及对消措施。由对比试验可知,对无船摇影响的位置矢量进行欧拉角旋转,求得受船摇影响的位置矢量,再利用矩阵变换解算出受船摇因素影响的仿真参数,实现船载角跟踪系统模拟器对船摇的模拟,能够比较逼真地反映船载角跟踪系统在真实场景中的状况,有效验证船载角跟踪系统受船摇的影响及对消措施的可行性。
但舰船在大海中受海洋气候条件的影响状况复杂,一般以横荡、纵荡、垂荡、艏摇、纵摇、横摇等6个自由度来描述,建立发生摇荡的全面仿真模型比较困难,笔者目前只探讨了船摇中的艏摇、纵摇、横摇3个自由度对船载设备跟踪性能的影响,但横荡、纵荡、垂荡叠加一些不规则运动等对跟踪性能的影响及其模拟方法需要进一步研究。