三维散射中心模型辅助的一维距离像要害部位选择
2021-09-29吴宏铭朱永锋周剑雄
陈 冀 吴宏铭 朱永锋 周剑雄
(1. 国防科技大学电子科学学院, 湖南长沙 410073; 2. 火箭军61基地96813部队, 安徽黄山 242700)
1 引言
高分辨一维距离像(High-resolution range profile HRRP)以其能有效降低杂波功率而被广泛应用于雷达检测识别领域。在采取高分辨一维距离像为识别手段的问题中,如何准确判断目标位置,引导完成对于目标要害部位的有效杀伤是关键技术问题。由于距离像一维特性,高分辨一维距离像丢失了大部分的目标三维散射结构信息,难以仅通过一维距离像判断目标要害部位在截取距离窗中的具体位置,而因强度、姿态角度等因素影响,目标要害部位甚至难以在一维距离像中以高强度散射峰的形式表现出强散射特性,这更是让基于一维距离像的目标要害部位选择问题难以解决。针对上述问题,现有文献大多基于二维成像进行攻击点的选择:文献[1]分析了成像制导系统中的攻击点选择,并对不同距离目标的成像特点进行了讨论,最后以实例给出攻击点选择的具体方法;文献[2]以打击港口重点目标为研究背景,已知港口子目标幅度特性,提出了一种实现群体打击,毁伤最优的瞄准点选择遗传算法;文献[3]建立了岛礁区的可选攻击阵位模型,为雷达和红外制导协同攻击岛礁区目标的攻击阵位提供了方法参考。
可见,上述方法或以二维成像数据为先验信息,或以群体打击,毁伤最优为研究条件,难以满足对单目标要害部位打击的背景需求。本文针对地面静止目标要害部位打击的特定场景,拟通过获取目标三维散射中心结构的先验信息,以中距离段在线获取目标SAR(Synthetic Aperture Radar)图像为前置条件,根据飞行器弹道变化通过二维成像段目标姿态角预估末段距离像制导时目标姿态变化,利用二维相对一维像的高姿态适应性实现SAR辅助下的一维距离像要害部位打击。具体为:拟通过三维模型确定目标打击部位在二维图像中的具体位置,而后经提取散射中心,向一维距离像姿态角投影相加等步骤获取目标的一维散射点序列并明确目标要害部位具体位置,最后按照滑动最大匹配原则,认定最优匹配时模板部位所对应的距离像位置为目标打击位置,从而实现三维散射中心模型辅助的一维距离像要害部位选择。
2 算法描述
图1给出了要害部位选择算法的总流程。在此假设获得目标三维模型及二维SAR图像先验信息。下面对几个关键步骤逐一介绍:
图1 算法流程Fig.1 The algorithm procedure
2.1 三维散射中心模型辅助的SAR图像要害部位选择
在打击重点目标的背景假设中,必然已知目标的型号及具体参数,较易获取打击目标的三维模型并可通过侦查、平时获取等多种手段得到目标SAR图像的先验信息。对于部分姿态角下的目标SAR图像,打击部位以强散射特性反映在目标SAR图像中从而使要害部位的选择得以在二维图像中直接确定。这种情况下,我们可以通过SAR图像辅助的一维距离像要害部位选择方法直接锁定打击部位实现精确打击,但部分方位角下,目标要害部位难以显著反映在二维图像中,需要以三维模型辅助确定要害部位位置。此时,我们可以利用电磁计算等方式建立目标的三维散射结构模型[4]。而SAR图像是对目标散射结构的二维展示,其不仅能在x-y维反映目标散射中心分布情况,更能反映三维模型向一维直接投影时所无法体现的幅度信息,成为三维投影一维模板的辅助桥梁,得到用以匹配的一维散射点序列模板。
目标的空间散射分布可以等效为由一系列离散分布的孤立散射体组成,这种在目标空间稀疏分布的离散散射体称为“目标散射中心”[5-7]。而目标SAR图像、一维距离像可以视为目标散射中心在雷达径向平面或一维径向方向上的投影[8]。因此,如果通过三维向二维投影,二维向一维投影,能够获得较好的二维及一维匹配模板并确定要害部位在二维像和一维像中的具体位置。同时,值得强调的是,由于散射中心相对于目标特征的稳定性,该算法可通过散射中心向各方位角方向的投影实现对目标待匹配像姿态角的适应性,也因此大大降低了模板库的数量及获取难度。
以爱国者雷达车为例。根据目标三维实体模型,解出三维强散射点分布情况[4],如图2所示。

图2 目标三维实体模型及三维散射结构模型Fig.2 Three-dimensional solid model and scattering center model of target
选择爱国者雷达车架设的阵列天线为要害部位,根据其在实体模型中的具体位置,转化其在三维散射模型中的位置如图3所示。
图3 打击部位(阵列天线)在三维散射模型中的 具体位置(图中黑框为天线范围)Fig.3 The specific location of key parts (array antenna) in the three-dimensional scattering center model (The black box in the figure is the antenna position)


图4 三维坐标空间与二维空间投影关系示意图Fig.4 The projection diagram of three-dimensional coordinate objecting in two-dimensional image plane
(1)
(2)

实际应用中,考虑转化后的二维散射中心只是空间的相对关系,而待匹配SAR图像由大场景中取得,两者匹配时图像的原点一般不重合,标有要害部位的散射中心模板无法直接套准SAR图像目标,确定SAR图像中重点部位位置。因此,在二维匹配过程中存在平移配准问题。为解决上述问题,我们选定目标SAR图像为参考的二维像,保持待匹配像位置不变。同时,按照滑动匹配最大相关准则将二维散射中心模板与待匹配像对齐。具体为:
(1)获取散射中心模板σxy(x,y),设定模板的强度值为1:
σxy(x,y)|x=xi,y=yi=1
(3)
其中,xi,yi为三维投影获取的强散射中心二维坐标。
(2)将待匹配像的中心固定在原点,令模板沿x-y坐标轴从左至右,从上至下平移,从两幅像开始相交,直到两幅图像不再有交点为止,遍历二维待匹配像每一个像点。每移动一个单元便计算一次匹配值T(Δx,Δy):
(4)
其中,Δx为x方向平移距离,Δy为y方向平移距离,σ(x,y)为待匹配的目标SAR图像。
(3)取Tmax(Δxm,Δym)=MAX(T(Δx,Δy))为此次匹配结果,并将此时二维散射中心模型中目标打击部位对应的SAR图像部位认定为SAR图像要害部位。
2.2 三维散射中心模型辅助的一维距离像要害部位选择
提取出目标SAR图像散射中心后,得到离散的二维散射中心点阵,参照文献[9-10],通过将二维点阵向对应方位角投影,得到对应的序列,此时各个点的幅值不变,对投影后的同一距离分辨单元上的重叠的散射点进行幅度相加,再按照距离进行顺序排列,得到该目标基于散射中心投影的一维散射点序列。

图5 二维散射中心匹配效果及要害部位对应SAR 图像中位置(图中白框为天线范围)Fig.5 Matching effect of two-dimensional scattering centers and the position of the position of the key parts in the image (The white box in the figure is the antenna position)
图6 匹配最优时二维散射中心及要害部位对应SAR 图像中位置(图中白框为天线范围)Fig.6 The position of two-dimensional scattering centers and key parts in SAR images with optimal matching (The white box in the figure is the antenna position)
假设SAR图像二维散射中心投影后的一维散射点序列σm(r)表示为:
(5)
其中,M代表散射点序列数目,ri代表散射点序列投影距离,Ai代表对应散射点强度。
一维距离像要害部位选择的具体匹配方法如下:
(1)模板确定:将标有要害部位位置的一维散射点序列模板σm(r)通过开平方根增大动态范围,得到增大动态范围后的散射点的结果σ(r)。将散射点序列σ(r)按式(5)进行系数归一化,此时得到归一化后一维散射点序列σ′(r)。
(6)

(2)计算匹配系数:将待匹配的目标一维距离像开平方根增大动态范围得到f1(r)。此时进行匹配的分别为f1(r)与σ′(r)。定义待匹配像f1(r)与模板散射点序列σ′(r)的匹配系数为M,其表达式如下:
(7)
实际中,雷达接收回波的长度很长,需要用距离窗将目标所在的数据段从回波中截取出来。当距离窗截取位置不同时,目标信息在距离窗中的实际位置会随之改变,此为一维距离像的平移敏感性。在匹配中,我们选定待匹配距离像为参考的距离像,保持参考像位置不变。同时,按照滑动最大相关准则将一维散射点模板与待匹配距离像对齐。具体匹配算法为:
(1)将待匹配像f1(r)的中心固定在原点,令模板沿坐标轴从左至右平移,从两幅距离像开始相交,直到两幅图像不再有交点为止。每移动一个单元便计算一次匹配值M:
(8)
(2)取Mmax(Δr)=MAX(M(Δr))为此次匹配结果。而此时模板中标记要害部位的散射点位置所对应的一维距离像位置即为要害部位判定位置。

图7 要害部位在二维图像及一维散射点序列中 位置(圆圈短线为要害部位位置)Fig.7 The position of key parts in two-dimensional image and one-dimensional scattering point sequence (Circle short line is the key position)
3 实验分析
3.1 要害部位在距离像中的实际位置(仿真)
采用爱国者雷达车的电磁计算数据。根据SAR图像与一维距离像关系,将矩形天线四角坐标所在范围投影至目标一维距离像不同姿态角,并将所有方位角下距离像排列,得出要害部位在目标距离像中的实际位置,分布如图8所示。
图8 要害部位(阵列天线)在不同方位角距离像中的位置Fig.8 The position of the key part (array antenna) in the distance images with different azimuth angles
可以看到,大角度下由于爱国者雷达车接近正对雷达方向,雷达阵面所造成的强反射区域对于目标整体成像区域的覆盖性很强。而此时,如图9,投影至要害部位距离单元内的强散射中心不只有雷达阵列天线,为排除其他强散射中心对我们判断要害部位距离偏差时带来的影响,我们认为小角度下(30°以内)阵列天线所覆盖的距离单元皆为攻击判定有效区域,大角度下(30°以上)选择天线中部不存在其他强散射区域的距离单元作为攻击判定有效区域,最终有效判定范围如图10(a)。
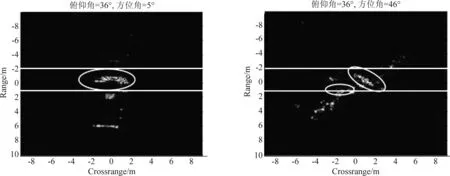
图9 要害部位所在位置示意图Fig.9 Position diagram of key parts
由图10可知,部分方位角下因结构、姿态、强度等因素,目标要害部位在一维距离像中不一定以高强度散射峰的形式表现出强散射特性(图10(b)),使得单纯依赖一维距离像进行要害部位选择十分困难。因此,本文利用三维散射模型的先验信息,辅助距离像完成要害部位的选择。

图10 要害部位在距离像中实际位置(无噪声)Fig.10 Actual position of the key part in the image (noise-free)
3.2 三维模型辅助的一维距离像要害部位选择结果(仿真)
将目标待匹配一维距离像与散射点序列模板如2.2中按照滑动最大原则进行匹配,得到目标最大匹配系数下模板与待识别一维距离像相对位置关系,对应模板中的要害部位判定坐标与实际要害部位所在距离像坐标,得出攻击距离偏差值,得到要害部位判定正确概率。
如图11,待匹配距离像中虚线部分为要害部位在目标距离像中的实际距离单元,标记为短线圆圈的散射点模板所对应的距离像部分为算法所判定的要害部位所在距离单元。判定具体准则为:如果算法判定的要害部位与实际要害部位所在距离单元重合,则要害部位偏差值为0,如果判定要害部位不在实际距离单元内,则计算要害部位距实际位置最近的偏差距离,计为要害部位偏差值,如图12所示。
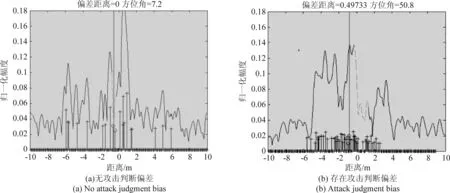
图11 待识别距离像与散射点序列模板匹配情况(信噪比20 dB)Fig.11 Matching situation of image to be identified with scattering point sequence template (SNR=20 dB)
图12为俯仰角36°下0°~66°方位角(共计661个角度)要害部位选择距离偏差值。为验证算法的普适性,现对俯仰角30°~40°(共计11个角度)的电磁计算数据进行仿真,平均每个俯仰角下各方位角的要害部位判定正确概率。设定允许偏差的攻击距离为0.5 m,即要害部位偏差0.5 m内的判定都视为正确判定,得到如图13的不同俯仰角下方位角平均的要害部位判定正确概率。

图12 要害部位选择距离偏差(信噪比20 dB)Fig.12 Selection deviation of the key part (SNR=20 dB)

图13 不同俯仰角下(0°~66°方位角平均)要害部位 判断正确概率(信噪比20 dB)Fig.13 Crrect pobability of the key part judgment under different pitch angles (0°~66°)(SNR=20 dB)
3.3 考虑角度偏移量的一维距离像要害部位选择(仿真)
实际应用中,难以精确知道目标朝向、姿态,以SAR图像投影产生与目标一维距离像方位角完全一致的模板,这就导致因方位角偏差诱发的匹配失真成为在实际应用过程中无法避免的难题,所以,考察本算法在存在角度偏差时的要害部位判断性能差异对后续的实际应用来说至关重要。在此,选取俯仰角36°下姿态角存在偏差(正负10°以内)的待匹配距离像与一维散射点序列模板进行匹配,对0°~66°方位角进行平均,得到不同角度偏差下要害部位选择平均正确概率,结果如图14所示。

图14 角度偏差下要害部位选择正确概率(信噪比20 dB)Fig.14 Correct probability of selecting key parts under angle deviation (SNR=20 dB)
由仿真结果可知,虽然在随着偏差角度的增大,要害部位判断正确概率呈下降趋势,但该算法在SNR>20 dB时对于一维距离像要害部位选择仍具有很高的正确概率,角度偏差正负10°范围内,要害部位判断的正确概率>90%,具有较高的实用价值。
3.4 SAR图像辅助的一维距离像要害部位选择(实测)
采用福田S3厢货实测数据(方位角30°~130°,俯仰角0°)对SAR图像辅助下的一维距离像要害部位选择部分算法进行验证。以雷达正对转台中央,雷达波直射转台上旋转的厢货,获取目标实时的一维距离像数据。通过ISAR成像获取目标二维图像,生成一维散射点序列模板,以实测一维距离像进行匹配,验证一维距离像要害部位选择算法性能。

图15 实测场景设置情况Fig.15 Actual scene settings
选择厢货车头为要打击的要害部位,将车头坐标所在范围投影至目标一维距离像(图17○、+标注范围),并将所有方位角下距离像排列,得出要害部位在目标距离像中的实际位置,对比不同方位角距离像,结果如图17所示。
以2.2中方法投影映射得到标有要害部位位置的一维散射点序列模板,按照滑动最大匹配原则与待识别距离像进行匹配,计算匹配位置与要害部位实际位置的距离偏差(图17中距离像虚线部分为要害部位真实所在位置,圆圈短线一维散射点序列所应对的距离像位置为算法判定的要害部位所在位置),分析SAR辅助下一维距离像要害部位选择(峰值信噪比20 dB)算法性能,具体结果如图18所示。
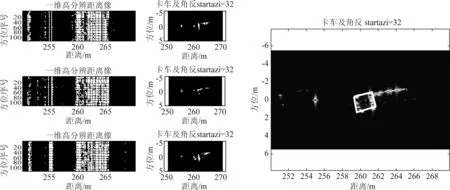
图16 三通道ISAR图像及要害部位对应位置(白框标注)Fig.16 Three-channel ISAR image and the corresponding position of key parts (white box labeling)

图17 要害部位在距离像中实际位置(未添加噪声)Fig.17 Actual position of the key part in the image (noise-free)

图18 待识别距离像与散射点序列模板 匹配情况(信噪比20 dB)Fig.18 Matching situation of image to be identified with scattering point sequence template (SNR=20 dB)
实验研究了实测背景环境下SAR图像及要害部位先验已知,辅助进行一维距离像要害部位选择的核心部分算法性能,验证了该算法在额定信噪比下(SNR≥20 dB)具有较好的要害部位选择能力,说明了算法在实践中的应用价值。

图19 要害部位选择距离偏差(信噪比20 dB)Fig.19 Selection deviation of the key part (SNR=20 dB)
4 结论
本文以三维散射模型为辅助手段提供先验信息实现一维距离像的要害部位选择,主要研究分析了三维模型辅助的SAR图像要害部位选择方法和SAR图像辅助的一维距离像要害部位选择方法,通过实验仿真的手段对算法的可行性进行验证,并采用福田卡车实测数据验证了SAR图像及要害部位先验已知,二维图像辅助一维距离像要害部位选择的核心部分算法性能。同时,考虑姿态角不匹配带来的角度偏移影响时,要害部位判断的正确概率仍然大于90%。下一步将利用实测数据,验证分析算法全部流程,考虑强电磁干扰对抗背景下二维图像有效信息提取等问题并拓展目标类型,使算法更具实用价值。
