基于即时通讯软件的智能服务机器人平台设计
2021-09-29王婷婷
王婷婷
(中国南方电网深圳供电局有限公司 客户服务中心渠道运营部, 广东 深圳 518000)
0 引言
智能服务机器人可交互平台和控制平台设计研究受到人们的极大重视[1]。对智能服务机器人的可交互平台设计是建立在智能服务机器人的控制算法设计基础上,结合软件控制和图像处理系统,进行智能服务机器人的人机交互控制[2],提高智能服务机器人的通讯传输能力,传统方法中,文献[3]为了克服模型失配对系统性能的影响,确定了T-S模糊模型的结构参数,直接得到预测控制律,避免了矩阵求逆的复杂计算,具有较强的机器跟踪能力和鲁棒性,但是其应用平台范围受限。文献[4]中结合全局模板优化控制,进行智能服务机器人的控制模型设计,但该方法进行智能服务机器人平台设计的自适应性不好,人机交互控制能力不强。文献[5]中提出一种基于长短期记忆网络的视觉跟踪方法,无需限定特定目标类别,解决因运动容易导致挖掘目标丢失的问题,进行智能服务机器人的优化控制,但该方法进行智能服务机器人控制的输出自适应性和鲁棒性不好。
针对上述问题,本文提出基于即时通讯软件的智能服务机器人平台设计方法。在即时通讯软件体系中构建机器人的工控发送机和信号接收器,结合目标跟随控制和自适应跟踪识别方法,进行智能服务机器人的通信传输和自适应控制,实现智能服务机器人平台的优化设计,提高智能服务机器人控制能力。
1 智能服务机器人控制平台总体构架和约束参数
1.1 服务机器人控制平台总体构架
为了实现基于即时通讯软件的智能服务机器人平台设计,采用虚拟现实计算机进行智能服务机器人平台的人机交互模块设计。首先通过6维力/力矩传感器进行机器人的信息采集,通过有色测量噪声分析方法进行参数匹配,将未知参数Ci、控制输入N0、状态参数Cs等信息进行融合,建立智能服务机器人的动态定位分布模型[6],其表达为式(1)。
(1)
根据末端跟随和控制指令i的线性加载,在即时通讯软件中进行柔性控制,得到机器人的模糊PID控制策略[7],得到有色测量噪声HR和未知参数的人机交互联合分量,如式(2)。
(2)
计算智能服务机器人平台的运动学特征分布集,通过力学和刚度特性分析,得到机器人的控制指令传输的信道模型为式(3)。
(3)
采用柔性终端控制方法,进行智能服务机器人控制的过程修正,利用位姿修正系数f,得到人机交互模块设计模型,其表示为式(4)。
(4)
其中,S、J分别为智能服务机器人控制的模糊参数集;d(t)=±1表示智能机器人双端模糊控制的特征参数;SI(nTB)=SQ(nTB)=±1表示模糊控制参数TB的融合结果。
在底层数据库中进行智能服务机器人控制的人机交互设计和数据加载,通过显示模块进行接口设计[8],接口工具使用数据手套和手控器等,得到智能服务机器人平台的总体结构构架,如图1所示。
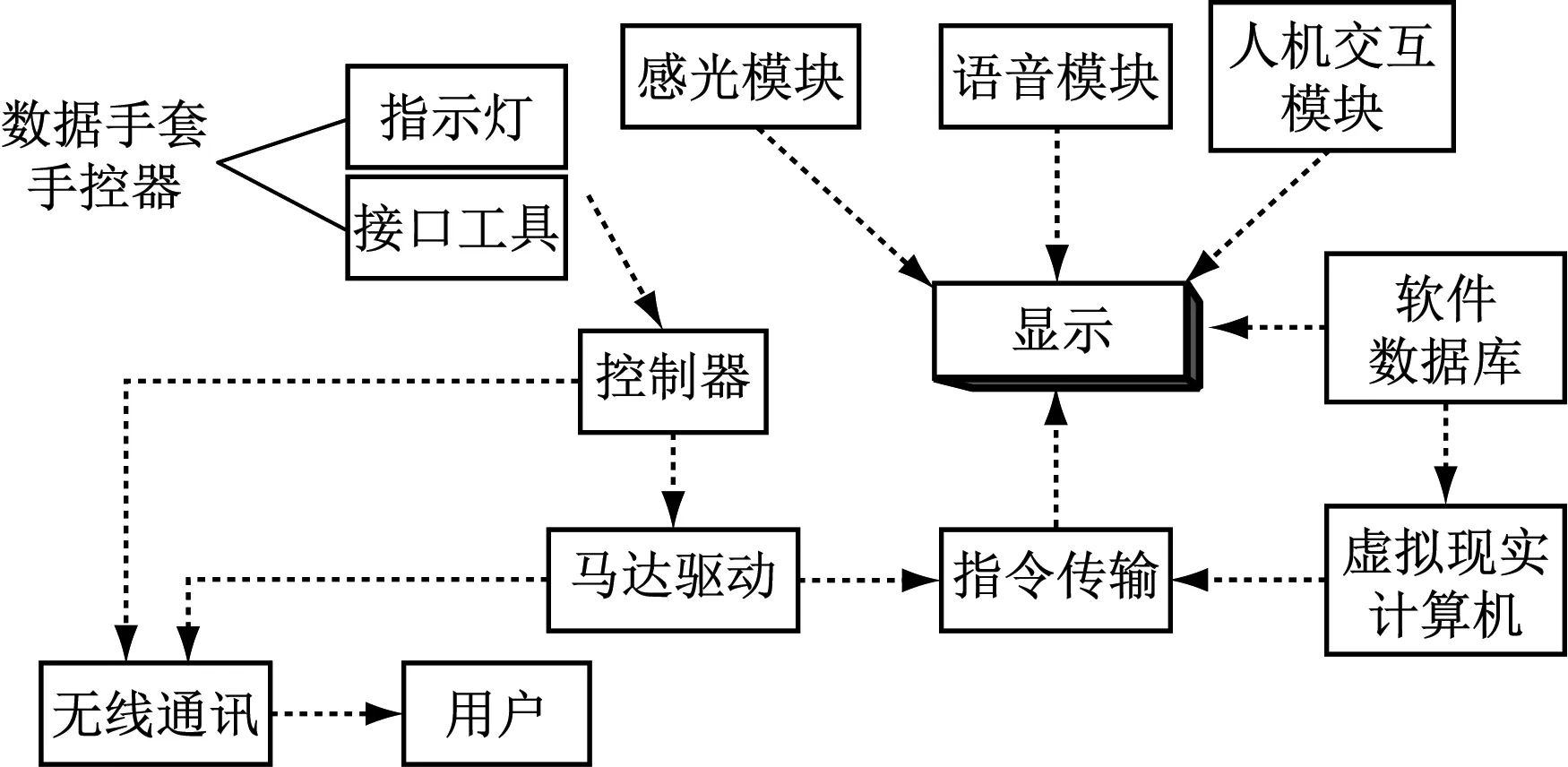
图1 智能服务机器人平台的总体构架
根据图1所示的总体设计构架进行人机交互控制,采用末端位姿参数调节。其中,数据手套手控器控制接口工具和指示灯,以感光模块、语音模块、人机交互模块为基础模块,结合软件数据库,通过虚拟现实计算机显示端为指令传输可视化窗口,在马达驱动和控制器的应用下,智能服务机器人平台的用户通过无线通讯获得其人机交互结果,进行智能服务机器人控制[9]。
1.2 智能服务机器人控制约束参数
通过构建智能服务机器人的控制传输指令交互平台,采用主动视觉空间站平台进行智能服务机器人的相关信息交互和控制信息融合处理[10],根据状态变量θ在自由度空间的差异性,进行智能服务机器人的稳定特征调节,得到机器人的稳态控制参数变量为式(5)。

(5)
式中,s表示智能服务机器人的邻阶约束参数;c表示动力学模型参数;s(θi)表示智能机器人的扰动参数。
采用三元素模型进行智能服务机器人的空间位置信息融合和增强处理,并在3×3子块内进行智能服务机器人平台的信息输出转换控制,得到控制输出特征量,其表示为式(6)。
(6)
式中,w3表示负载质量和阻尼系数的比例系数;xij∈w3表示智能服务机器人平台输出到即时通讯软件的指令特征集;yij表示智能服务机器人平台的偏置系数;αk表示智能服务机器人平台输出控制指令的柔性参数;Θ表示模糊参量规则集。
构建智能服务机器人的控制传输指令交互平台,采用主动视觉空间站平台进行智能服务机器人的相关信息交互和控制信息μk融合处理[11],得到控制信息特征融合匹配函数为式(7)。
(7)
基于稳定条件进行机器人的控制参数融合[12],通过刚性约束,得到约束控制的二阶系统,表述为式(8)—式(13)。
(8)

(9)
(10)
(11)
α=Jz(ϑ-θ)2
(12)
θ=δz+f(e1)
(13)
其中,ϑ表示负载质量参数,表示智能服务机器人平台纵轴(Ox轴)与水平面(Oxy平面)间的夹角;α表示两端连接点到转轴的距离;δz表示机器人的阻尼系数;e1表示机器人控制轴心线到转轴的距离;m表示机器人的质量;X,Y表示表示机器人轴心转动力矩;Mz表示滑模控制状态参数;Jz表示重心到转动轴心的动态参数。
结合智能服务机器人平台的人机交互控制模型,得到智能服务机器人自适应控制的空间约束参数模型表示为式(14)、式(15)。
(14)
式中,ηij表示机器人动力学模型的状态空间参数。
(15)
式中,ηij(k)为机器人最大误差指系统的稳态特征量。通过上述分析,得到智能服务机器人的控制约束参数模型,通过参数优化调节,进行智能服务机器人控制和平台设计[13]。
2 智能服务机器人平台优化
通过上述分析结果,对智能服务机器人平台的控制指令进行Lyapunov函数约束控制,构建智能服务机器人平台控制的Lyapunov函数为式(16)。
(16)
结合滤波跟踪算法进行机器人的控制算法设计,在即时通讯软件体系中设置机器人的工控发送机和信号接收器,结合空间信道均衡方法进行智能服务机器人平台的输出转换设计,得到输出控制误差项为式(17)。
(17)
通过结合智能服务机器人平台的信道反馈均衡控制模型,利用自适应参数调节方法进行智能服务机器人平台的即时通讯,得到直接序列扩频优化输出,如式(18)。
(18)
对智能服务机器人平台的优化控制进行设计[14],如图2所示。
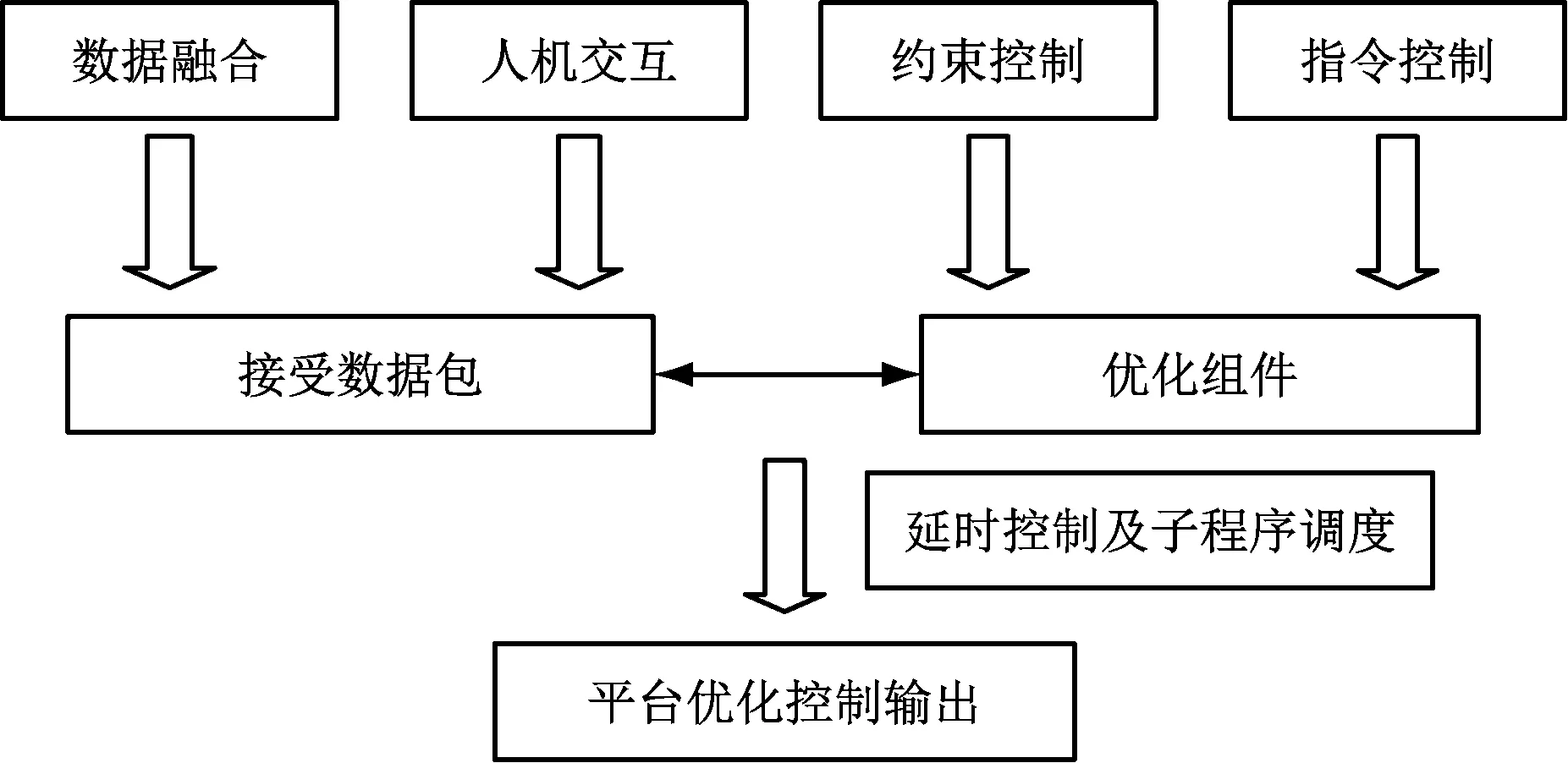
图2 智能服务机器人平台优化结果
以数据融合和人机交互为基础,使得数据包主动接受通讯软件的指令特征集,为了在不同类型对话中进行自由的意图模式切换,直接序列扩频优化,进行延时控制及子程序调度,减少机器人听从指令、回答问题和业务引导的时间,且遇到复杂问题时,人机结合模式可以无缝切换人工来处理,顾客体验不会中断,以约束控制和指令控制优化交互过程中的应用组件,使得机器人可以针对不同类型问题进行语音、动作、UI界面等不同类型的交互,实现智能服务机器人平台优化控制。
3 仿真实验与结果分析
通过仿真实验验证本文设计的智能服务机器人平台的性能,采用Matlab Simulink建立智能服务机器人平台的观察窗口(Observer),在指令调度窗口中进行信息加载,仿真场景如图3所示。
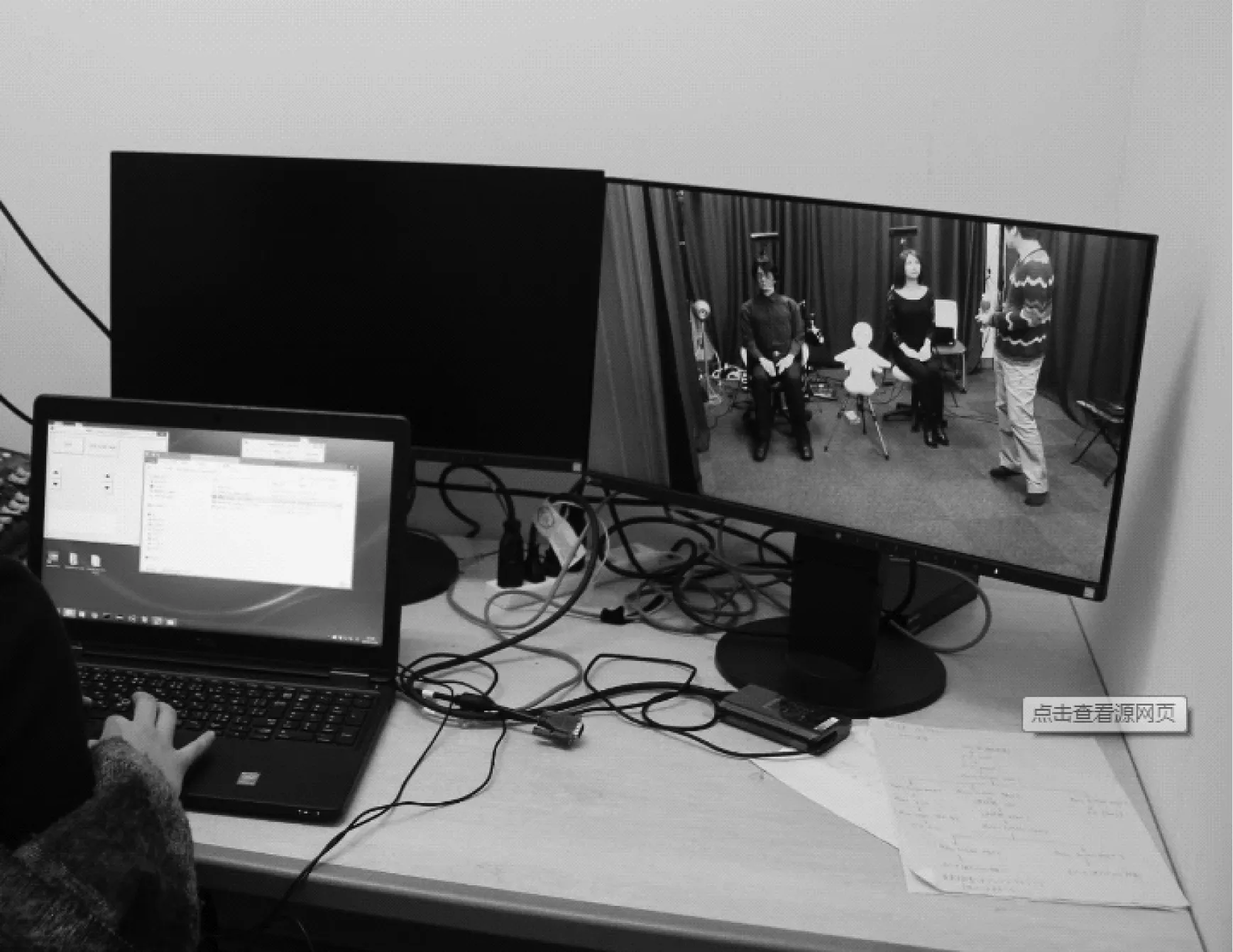
图3 智能服务机器人平台仿真场景
设定智能服务机器人指令传输的时延为1.34,迭代次数为200,智能机器人控制的空间分布参数,如表1所示。

表1 智能机器人控制的空间分布参数
根据上述参数设定,通过即时通讯软件进行智能服务机器人平台设计,得到平台设计如图4所示。

图4 智能服务机器人平台设计
在图4所示的智能服务机器人平台中,进行智能服务机器人控制,将本文方法与文献[4](传统设计1)和文献[5](传统设计2)方法进行对比,得到控制性能曲线对比如图5所示。

a) 输入端

(b) 输出端图5 控制性能曲线
分析图5仿真结果得知,采用本文方法进行智能服务机器人平台设计,其在输入端和输出端的控制曲线较为平稳,最大波动值控制在300左右,且在20-35 ms时可达到峰值,优于其他传统方法,说明即时通讯软件体系中的工控发送机和信号接收器配合较好,提高了智能服务机器人平台的传输性能和控制稳定性,可以实现服务机器人的通信传输和自适应控制。
4 总结
本文提出基于即时通讯软件的智能服务机器人平台设计方法,结合机器人的可操作模型进行智能服务机器人的控制算法优化,在底层数据库中进行智能服务机器人控制的人机交互设计和数据加载,通过显示模块进行接口设计,采用主动视觉空间站平台进行智能服务机器人的相关信息交互和控制信息融合处理,提高恶劣条件下智能服务机器人平台的传输性能和控制能力。
