适用于智能交通系统仿真平台的微型集群机器人研究
2021-09-28陆祺灵
周 娟,陆祺灵,刘 磊
(1.上海建桥学院 职业技术学院,上海 201306;2.上海理工大学管理学院,上海 200093)
0 引言
智能交通系统(Intelligent Transportation System,ITS)将先进的信息技术、通讯技术、传感技术[1]、控制技术以及计算技术高效地集成在一起,建立出一个强大的、全方位的地面交通管理系统,满足了现代交通运输的需求。自动驾驶是智能交通发展的重要领域之一。随着人工智能、移动网络、大数据等技术的迅速发展,以自动驾驶为代表的新一代ITS 逐步成为解决交通问题的突破口[2],其相关研究也日益受到高校重视[3]。
从系统工程的角度来看,ITS 属于开放式复杂巨系统[4]。近年来,基于“互联网+”的智能交通方案成为现代城市交通规划的重点[5],但构建这样的交通系统用于实践教学意味着巨额资金投入,如清华大学的汽车交通安全国家重点实验室便是得到了国家“863”项目、科技攻关项目、国际合作项目等资助,才得以开展该领域系统化的研究与教学活动[6]。为降低科学研究与实验教学成本,现有的ITS研究多集中在基于计算机视觉的目标检测与分类方面,尤其是运动目标的建模[7]多是对ITS 进行虚拟仿真[8],对半实物交通仿真平台的研究相对较少。目前只有少数研究机构在实验室内搭建大型半实物交通仿真平台对ITS 进行研究,如麻省理工大学建立了MITSIM 实验室,武汉理工大学、军事交通学院建立了半实物仿真平台[9],如图1 所示。

Fig.1 A hardware-in-the-loop simulation platform built by the Military Transportation Academy图1 军事交通学院建造的半实物仿真平台
虽然已有平台可以开展ITS 实验,但具有仿真车辆设计不够紧凑,需要占用较大实验室面积,车辆充电、编程维护成本高,车辆系统定位、通信系统设计成本高等缺点,使得其在微观层面上数据获取步骤复杂,不利于ITS 的智能化数据处理。
集群机器人是指组建一群结构相同或类似的机器人,其可在已知环境中相互协调与合作,共同完成任务[10]。集群机器的设计灵感来自于自然界的自组织系统,如社会性昆虫、鱼群、鸟群等基于简单交互规则的集群行为[11]。目前国内只有少数机构研究微型机器人集群,主要集中在分布式环境探测与协同物流搬运[11]等方面,适于实验室研究的通用微型机器人系统还有所欠缺,根本原因在于硬件小型化的难题迄今尚未解决。
为此,本文设计一套通用微型集群机器人系统,模拟ITS 中可以自动避障的自动驾驶车辆[12],以实现系统微型化、低成本、简维护、易制造的特性,大幅降低搭建与维护难度,以便在实验室内进行ITS 模拟,改善目前智能交通领域科研与实践教学的实际难题。
1 ITS 实验室总体设计
图2 为ITS 实验平台的总体设计。该系统长1m、宽1m、高2m,其中用于模拟道路交通环境的平台高0.6m,安装摄像头和投影装置的支架高2m,可容纳约150 台微型智能机器人。为方便初步测试,该系统采用环形边界作为圆形轨道测试集群机器人长时间的自组织控制性能。
该系统中,微型机器人群用于模拟自动驾驶车辆集群,无线充电平台模拟道路环境,摄像头模拟卫星定位,投影仪进行虚拟标注与显示,从而在整体上形成封闭的智能交通环境。摄像头通过图像处理将所有机器人的位置信息存储于服务器,一方面通过无线路由器以WiFi 的形式为微型集群机器人提供定位服务,另一方面可用于交通数据分析。运行平台底面铺设有充电线圈阵列,充电控制系统内置于电气控制柜,可不间断地为机器人提供电力。
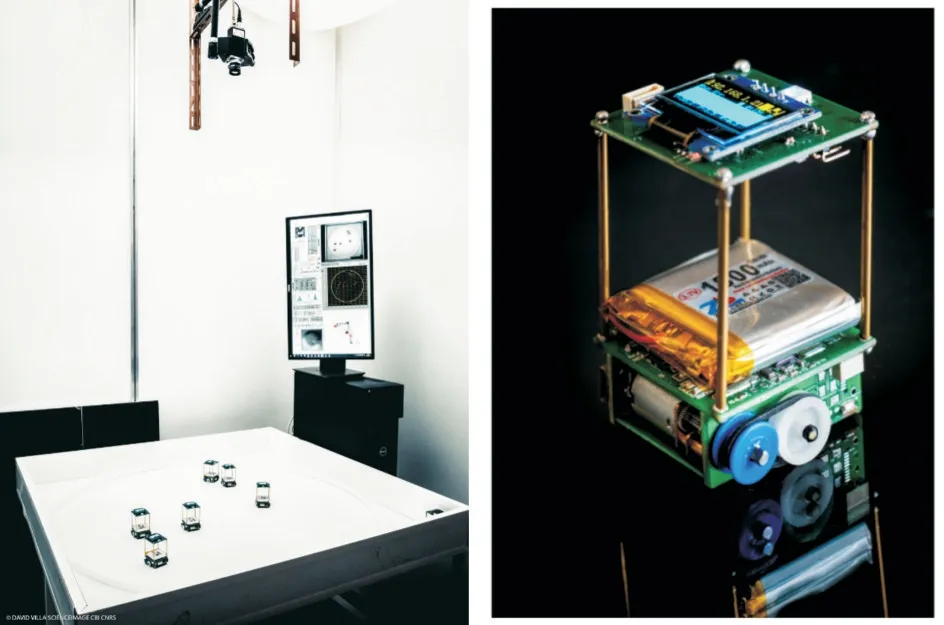
Fig.2 Intelligent transportation system experiment platform and its miniature swarm robot图2 智能交通系统实验平台及其微型集群机器人
受限于摄像机的帧率,图像处理模块的循环周期为300ms。跟踪软件采用卡尔曼滤波技术,将位置信息发送给每个机器人,焦点机器人通过每个机器人的位置信息还原局部相对测量信息,具体如图3 所示。测量信息为单体车辆相对于环境与邻居的瞬时信息,包括相对于边界的距离rw、相对于边界的角度θw、相对于每个邻居的距离dij、观察邻居的视角ψij和与邻居的相对航向角φij。将这些状态信息作为变量输入到单体的交互模型中,在模型输出与避障程序输出的共同作用下,最终将新目标位置分解为机器人电机驱动信息,通过WiFi 发送给每个机器人。
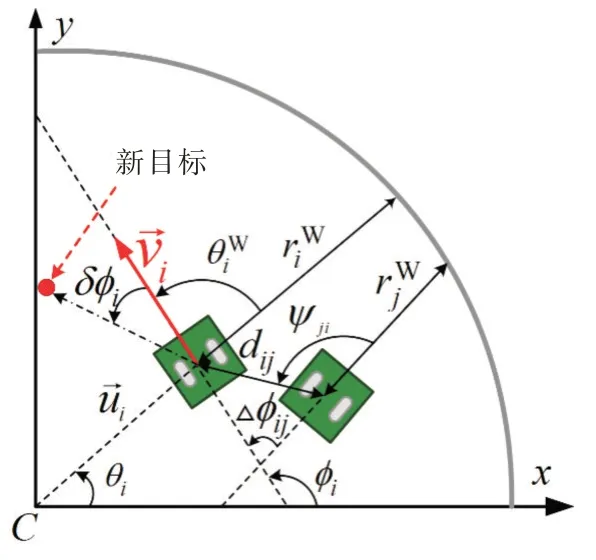
Fig.3 Sensing and control variables between the robot relative environment and the robots图3 机器人相对环境与机器人之间的传感和控制变量
机器人控制形式属于硬件回路仿真,其结构如图4 所示。仿真回路包含3 个部分,分别为用于检测本地环境的顶部摄像头传感器、用于计算决策的处理器和用于执行决策的执行器。虽然机器人可以完全独立地进行数据收集与处理,但编程是一项费时的操作,每个实验条件都要重新编写、编译和烧录。经过分析,本文决定使用外部计算机为每个机器人进行分布式决策计算,模拟ITS 系统的自治性与分布式控制条件。硬件回路仿真将机器人硬件集成到计算机软件中,不同于传统的软件仿真,硬件回路仿真集成了硬件约束,可以提供更加真实的仿真效果。

Fig.4 Hardware loop simulation图4 硬件回路仿真
2 微型集群机器人设计
2.1 结构设计
微型机器人结构如图5 所示,尺寸为长40mm×宽40mm ×高66mm。电机⑬无级调速,机身配备WiFi 收发装置⑧,可通过TCP/IP 网络协议获取服务器上的位置信息、运行脚本,也可上传自身状态。机器人装载两台微控制器,一台32 位ARM 微控制器位于中间电路板⑭,用于运行自动驾驶车辆控制策略;另一台8 位微控制器位于上电路板①,用于执行红外雷达②、③的近程通讯协议,该协议已获得国家发明专利[13],能够在160mm 范围内与其他微型机器人同时进行数据通讯与相对定位,通过该装置可模拟车车通讯以及车载雷达。机器人底部装有无线充电接收线圈⑫,通过锂电池充电管理系统能实现同时工作与充电,从而保证了智能体的不间断实验。上电路板①上侧焊接有1 个3 色LED 灯⑰,用于显示机器人的状态。液晶显示器⑯用于具体参数显示,3 轴磁传感器⑱用于姿态测量,中间电路板⑭上侧为大容量3.7V 方形聚合物锂离子电池⑮,电池上方粘有一球面反光镜⑤,用于增强红外通讯距离。上电路板①与中间电路板⑭之间采用4 根铜棒④进行电路连接,分别为电源正极、电源地、串行发送和串行接收,该串行通讯可使主控ARM 芯片与上电路板的传感控制8 位微控制芯片进行通讯连接。
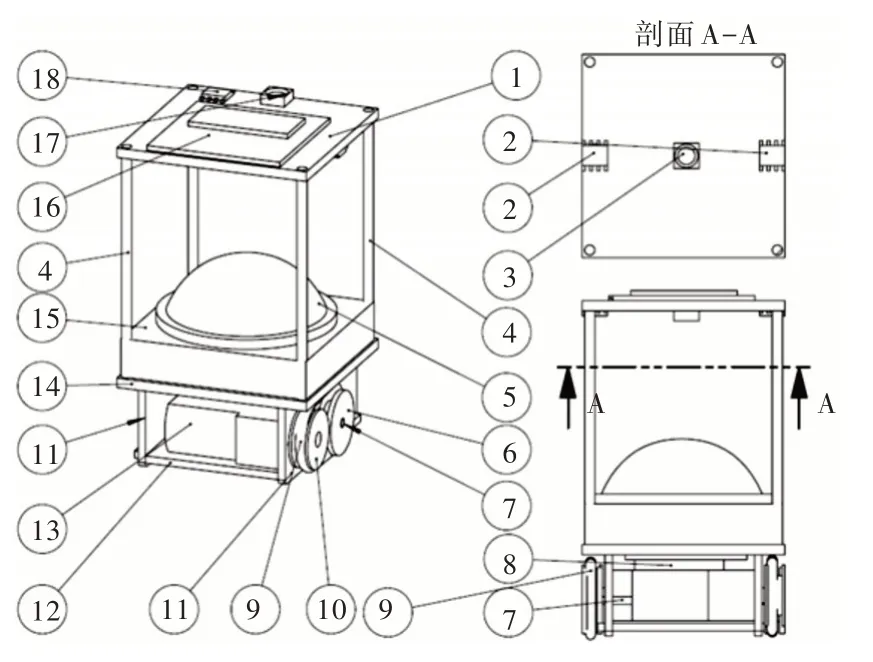
Fig.5 Micro-robot structure图5 微型机器人结构
2.2 特色功能设计
用于ITS 实验的微型机器人数量庞大,采用人工充电与人工烧写实验程序的方式维护成本高昂。针对此问题,本文在机器人上配备大容量聚合物锂电池。为使机器人能正常连续工作8h,还安装了大功率无线充电电路,使其在短时间内充满电力。设计WiFi 收发程序,使用无线网络通讯的方式批量更新底层所有机器人的程序,以提高实验效率。
机器人上电路板①下方正中焊接有一个红外发射管③和对称放置的2 枚红外接收管②,上电路板①的8 位微控制器通过调制红外信号向外发送机器人的身份信息,调制红外光经过球面反光镜⑤反射,被其他机器人的两侧红外接收管②所接收。接收机器人的8 位控制器解调信号能获取源机器人的身份信息,同时该控制器还可分别测量两侧接收管的信号强度,由此推算信号源相对于两侧传感器的距离,利用三角测量法[14]反算出信号源的方位与距离。该技术可低成本地实现可靠的车辆间短距离通信,又同时仿真了车载雷达[13]。
2.3 程序设计
微型集群机器人常用的处理器包括单片机、DSP、ARM等。每种控制器都有其独有特点,其中单片机价格低廉,适用于批量生产,但性能偏低;DSP 计算高速,但更适用于专业的数字信号处理;ARM 芯片可以承载操作系统,适合多任务、并发运行。通过反复衡量性能、成本、功耗等因素,微型机器人最终选定ARM 系列芯片,程序框架如图6所示。ARM 芯片的程序外层是一个BootLoader 外壳,其在脚本运行前初始化硬件设备,建立内存空间映射,将系统的软硬件环境配置到一个合适的状态,为最终运行实验脚本程序作好准备。

Fig.6 Micro-robot programming framework图6 微型机器人程序框架
实验脚本程序包括协同脚本、导航脚本、生存脚本3 个部分。机器人的协同程序称为协同脚本,用于实验机器人之间的安全交互与协同运动。该脚本可以通过红外协议和WiFi 通道与周围仿真车辆(机器人)共享信息,协商实现智能车队的协同控制。机器人的导航程序称为导航脚本,可使用运输路径最优选择模型[15]规划自动驾驶车辆从初始点到目标点的路径。机器人的运动控制程序称为生存脚本,其使用PID 控制器实现对模拟无人驾驶汽车的行驶控制[16],负责机器人的安全移动。生存脚本听从导航脚本与协同脚本的命令,根据WiFi 广播的机器人位置与MP9250 姿态传感器测量的朝向,使用卡尔曼滤波器[17]计算出机器人车轮的加减速与转向控制。可以根据不同实验目的开发脚本,更换机器人运行策略,辅助教学目标实现不同的智能交通协同策略。ITS 实验教学的主要目标为实现自动驾驶车辆的巡航、跟随、换道,以及自动驾驶车队的组合与拆分等任务,因此协同脚本与生存脚本的算法实验是其教学重点。
2.4 实验与测试
微型机器人样机如图2 所示。机器人底部使用2 盎司铜印刷电路板绘制的充电线圈,与铜线圈相比,其成本低、标准化程度高、易于批量生产。机器人电路可使用表面帖装技术(SMT)在工厂中批量制造,手动组装一台机器人仅需约10min,批量生产十分便捷。无线充电发射电路线圈采用印刷电路板形式,可方便地粘贴在实验平台底面,使机器人边运行边充电。
对该机器人的性能进行测试,发现其在满电状态下可连续中速移动超过10h,2h 内即可快速充电完毕。两个机器人之间在白色桌面上可实现160mm 范围的有效通讯定位,角度定位精度为±3°,距离定位精度为±5mm,多机器人红外通讯可通过协议[10]控制而互不影响。WiFi 通讯程序下载速度可达200kb/s。
实验程序脚本使用标准C 语言,采用KEIL C 编译工具开发脚本HEX 文件[18]。学生由于有先修课的基础,平台脚本编程掌握迅速,实验效果较好。运行数据可使用数据挖掘技术进行分析,为后续复杂系统的数据挖掘课程提供了大数据支撑。
通过对试制样机的仿真测试可知,本文机器人符合以下条件:①微型化,保证了在有限实验空间内形成规模效应;②低成本,可降低大规模机器人制造费用;③简维护,便于大规模机器人充电、烧写程序等;④易制造,保证大规模机器人的快速生产。样机指标符合设计预期,且制造方便、成本低廉、维护简单。
3 智能交通系统架构
ITS 实验系统主要包括微型机器人集群、服务器系统以及客户机3 个部分,具体如图7 所示。

Fig.7 Architecture of ITS laboratory protocol system图7 ITS 实验室方案系统架构
网络摄像机接入局域网中的系统应用服务器,在该服务器中运行图像处理算法[19],用于定位图2 环境中各机器人的位置,并开放API 接口,通过WiFi 网络向微型机器人单体提供实时定位服务。与此同时,该服务器还将定位数据通过内部网络存储于数据存储服务器,用于实验完成后对整体交通状况进行分析。投影仪连接系统应用服务器,用于向无线充电平台投影交通信号,例如路口交通信号灯、禁止通行标志等,该环境信息也将一并存储于数据存储服务器中,用于实验后分析。机器人的实时运行数据,如机器人身份信息、机器人动力学数据、机器人传感数据等也可通过WiFi 网络上传至数据存储服务器。
内网客户机可直接访问数据存储服务器获取实验数据,以进行本地显示或实验数据分析,也可编写脚本上传至应用服务器。这些脚本可下载至底层微型集群机器人中,脚本的版本控制信息存储在数据存储服务器中。服务器数据也可上传至公网云平台,在云平台上部署WEB 服务。客户机则可使用浏览器操控仿真平台,监控实验平台脚本以及运行效果,还可根据云平台数据进行深度学习与预测分析[20]。
4 简易智能车队模拟实验与结果分析
为测试平台仿真ITS 的有效性,初步验证智能车队集群运动的自组织控制性能,在如图2 所示的圆形边界轨道中,保持车队靠近道路边界而又不发生碰撞,进行集群运输。在每个单体的决策时刻,观测图3 所示的邻居与环境信息,机器人自主控制自身方向变化,并减速保持一定的安全距离。
在n+1 时刻,单体i的位置向量和朝向角可表示为如下离散决策模型:

决策长度需根据前进方向上的车辆与环境距离适当缩减,而决策时的航向角变化是环境与邻居共同作用的结果,表示为:

式中,γw为边界作用力强度,lw为边界作用范围。
邻居影响单体转向的模型δφij需要保证ITS 车队的汇聚性,可将转向模型分解为吸引与对齐两个方面,其值取决于机器人之间的相对信息dij,ψij,Δφij,表示为:

式中,dij为两智能体之间的距离,ψij为焦点智能体i观察邻居j的视角;Δφij=Δφj-Δφi,为机器人i与机器人j的相对航向角。
吸引力函数可以解析为:

式中,dAtt用于平衡短距离排斥作用与长距离吸引作用,避免过于凝聚导致的碰撞;γAtt为吸引作用力的强度,lAtt为引力影响的范围。同样可以假设对齐力函数为:

式中,dAli用以避免因对齐作用力而导致碰撞,γAli为对齐作用强度,lAli为对齐作用影响范围。
仿真实验具体参数如表1所示。
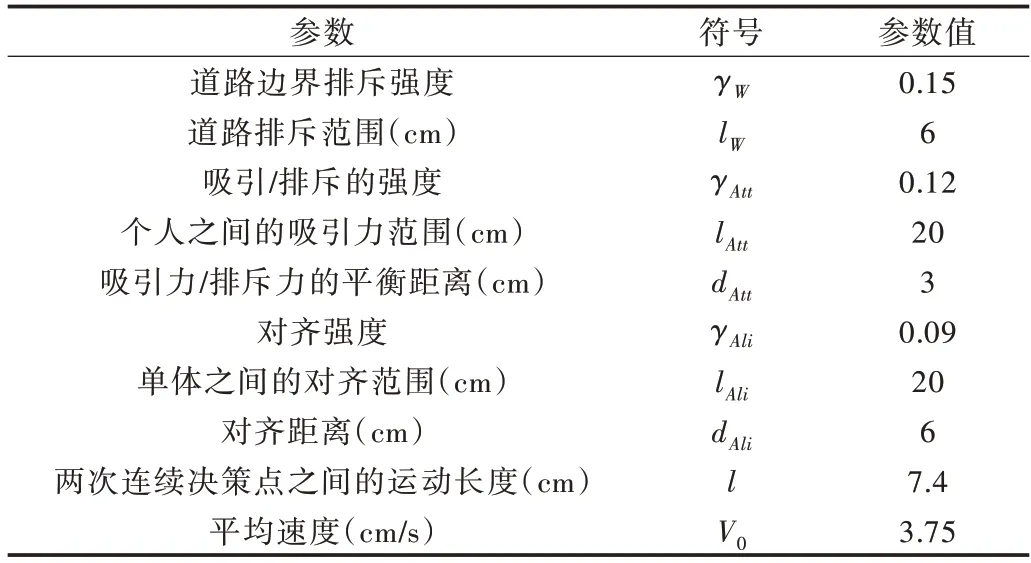
Table 1 Related parameters of robot simulation experiment表1 机器人仿真实验相关参数
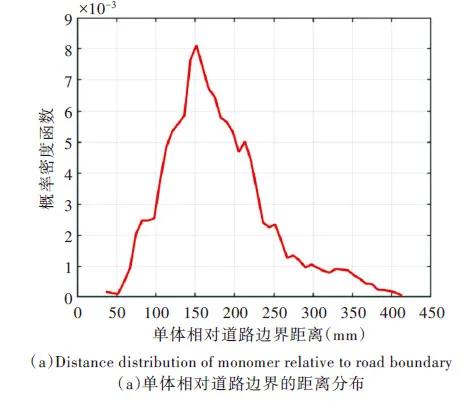
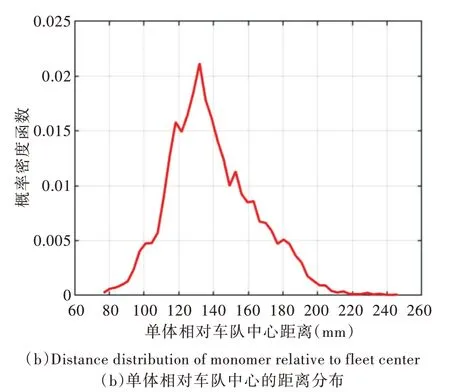
Fig.8 Results of the ITS simulation图8 ITS 仿真结果
对上述自组织控制过程进行由5 个机器人组成的车队模拟实验,获取了ITS 仿真数据。数据统计了车队集群运行过程中,单体相对道路边界以及车队中心的距离分布情况,具体如图8 所示。仿真数据表明,本文设计的实验室微型机器人平台可以保持集群在靠近道路的位置上连续运动,并保持车队的汇聚性。
5 结论
本文使用自主研发的微型集群机器人替代自动交通运输系统,提出一种实验室级ITS 解决方案,有助于ITS 实验室的标准化,为高校教学、科研提供了便捷实用的实验平台,是教学改革的一次有益尝试。本方案的不足之处在于:智能车队实验针对的是初步模拟简化的车队交通,且集群机器人的设计只适用于在二维空间中探索,不适用于三维空间。后续会考虑改进集群机器人的传感机构,使其能够在三维空间中运行,以便进行更复杂的交通环境模拟。
