基于全卷积神经网络的测绘遥感压缩影像分辨率优化研究
2021-09-27余龙君
余龙君
(广东省国土资源测绘院,广东 广州 510500)
0.引言
测绘遥感技术目前广泛应用于地质勘探、地形分析、航天航空以及海洋环境勘察等工作中,通过测绘遥感设备得到真实的环境影像,为了便于这些影像的存储,以压缩图像的形式保存这些影像,而这一过程会使影像分辨率下降。目前,关于遥感压缩影像方面的研究已有很多,如林瑶瑶等人从影像灰度、纹理、相关性等质量特征和精度两方面进行影像压缩质量评价实验,开展了多种格网尺寸DSM的提取,通过比较不同压缩比下重建与原始影像生成的DSM平均高程误差实现了遥感压缩影像分辨率的优化。但是由于实际地形因子以及测试影像会影响提取精度,从而导致影像压缩的效果被降低。陈文青等人提出一种基于奇异值分解(SVD)的遥感图像压缩方法,首先通过SVD分解获得压缩矩阵,然后采用局部压缩矩阵生成原始图像的近似图像。在分解过程中,通过压缩矩阵的奇异值曲线获取奇异值的衰减曲线以及对图像的贡献程度,选取不同的压缩值可以实现遥感图像的压缩。但是对压缩处理时间和特征点定位方面没有深入研究。因此研究基于全卷积神经网络的测绘遥感压缩影像分辨率优化方法。全卷积神经网络抛弃常规卷积神经网络模型的全连接层,转而使用卷积层分析数据原始尺寸,通过逐像素计算分类损失得到分割结果,一定程度上减少了采样过程中的信息丢失。下面对此次研究的优化方法进行详细介绍。
1.测绘遥感压缩影像分辨率优化方法
1.1 构建自适应小波阈值全变分去噪模型
小波阈值函数去噪可以实现去噪效果,但根据传统方法的应用效果可知,小波阈值去噪会造成图像边缘模糊的现象,而全变分模型可以保护图像边缘。因此,可以将小波阈值函数和全变分相结合,达到去噪效果的同时保留图像边缘的目的。图像被噪声污染是一个正向问题,根据观测的图像数据和所给的限制条件和所作的假设来获得原图像数据。基于全变分的去噪模型可以用以下方程式来表达如公式(1)所示:



式(3)中,ω在图像去噪的过程中起到平衡作用,当ω的取值越大,保真性就越强,图像去噪后和原图像差别越不明显。ω的值可以根据去噪图像的峰值信噪比来确定,该方法通过小波变换确定图像分解层,在此基础上进行全变分和阈值化处理,最后基于小波逆变换进行图像重构,从而得到去噪后的图像结果。
1.2 基于全卷积神经网络恢复压缩影像
为了加强压缩图像的边界恢复效果,同时明确图像边界,采用条件随机场下的全卷积神经网络恢复压缩影像。该算法的基本流程(如图1所示):
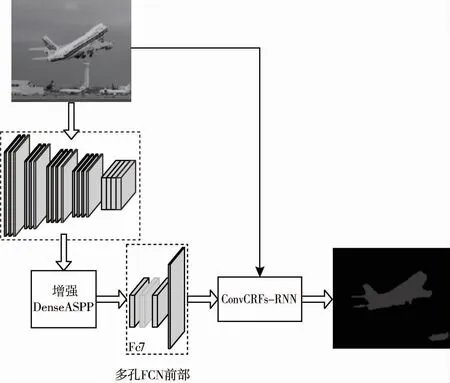
图1 全卷积神经网络恢复影像的算法基本流程
根据图1显示内容,影像首先输入多孔FCN中Pool5层之前的架构,以此扩大影像结构的视野感受,加强对细节内容的分析;然后将该架构输入到DenseASPP模块当中,加强算法对多尺度物体的适应效果;再将该模型中的数据,发送到Fc7层的后续卷积层之内;最后进入概率图模型模块展示单元,通过ConvCRFs一RNN,也就是条件随机场下的全卷积神经网络,得到压缩影像的语义分割结果。上述算法执行影像恢复操作的过程中,使用的CRFs由单个像素或图像块上的一元势,和相邻像素或块上的二元势组成,生成了邻接CRFs结构。但该结构远程连接能力较为一般,会使压缩影像的边界过度平滑,对该算法进一步优化。假设全连接的二元CRFs结构中,I是x上的完整影像,ZI是所有一元团、二元团的集合。如公式(4)所示:

式(4)中,E(x)为吉布斯能量函数计算结果;λw(xi)为示一元势;xi、yi为不同方位的影像特征标签。利用上式优化ConvCRFs一RNN,重构卷积条件随机场,通过重复层堆叠的方式多次平均场迭代,从每次迭代的前一次迭代中,获取原始形式一元势值,一元势正则化输出后与输入特征图叠加,然后进行平均场迭代的消息传递,每次迭代时将输出与原始输入特征影像进行叠加,并将其作为下一次迭代输入,直到迭代次数达到预设值后从模块中跳出,通过条件随机场下的全卷积神经网络,恢复遥感压缩影像实际尺寸。
1.3 压缩影像阴影的提取与补偿
遥感影像中的阴影区域在颜色结构上存在一定的规律,但受到外界客观因素的影响,阴影区域的色彩结构会发生相应变化,因此,要对阴影区域进行分析和提取。将图像的亮度分量与饱和度分量进行归一化处理,并计算图像亮度与饱和度差值。如公式(5)所示:

式(5)中,A表示影像的亮度;B表示饱和度分量。根据图像阴影区域特征,建立图像的阴影区域提取模型如公式(6)所示:

式(6)中,F1、F2分别为影像图中阴影部分的色调与非阴影区域的色调分别为图像色调和图像亮度与饱和度的差值。利用该提取模型对遥感影像的图像序列进行阴影区域提取。在此基础上,结合根据灰度线性变换算法对图像阴影区域的像素点进行灰度补偿,获取非阴影部分信息如公式(7)所示:

式(7)中,p为图像非阴影区域的像素点;Nab为非阴影部分;dia为阴影区域与非阴影区域的距离;d(p,Nab)为图像中非阴影区域中任一位置与阴影区域的距离。获得非阴影部分后,结合灰度变换与映射函数对图像中的阴影区域进行像素灰度补偿。如公式(8)所示:

由此实现压缩影像阴影区域的提取与补偿,对遥感压缩影像分辨率进行优化。
2.测试与分析
将文中提出的方法作为实验组,将传统方法1和传统方法2作为对照组,分别利用三种优化方法,优化测绘遥感压缩图像的分辨率。实验共分为两个阶段,第一阶段测试此次研究方法,是否具有实际应用功能;第二阶段从两个方面,比较三组优化方法的实际应用效果。
2.1 实验准备
测试开始之前准备测试对象:从USGS提供的数据库中,选择4条矿物光谱曲线,组成不同的立方体影像然后进行压缩处理。在空间维度上,将该立方体平均分为4个部分,每个部分中均还有同样的矿物光谱曲线。为了方便实验测试与结果分析,添加的噪声为高斯噪声。设置两个实验测试方案,其中方案A:将噪声直接添加到压缩影像上,保证各个子块的噪声分布状态相同,此时实验添加的噪声为18.92dB。然后保证测试对象不变,再以同样的测试条件,设置方案B:分别向4个子块添加不同程度的噪声,影像的总体信噪比为14.23dB,4组影像的信噪比分别为23.37dB、19.58dB、12.49dB以及5.2dB。测试此次研究的压缩影像分辨率优化方法,面对添加噪声后的压缩影像,是否有良好的分辨率优化,结果(如图2所示):
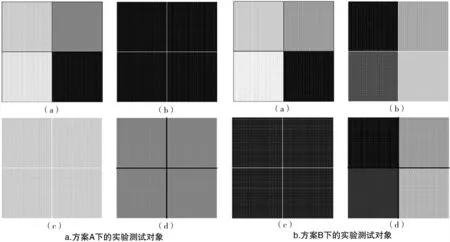
图2 文中方法的压缩图像分辨率优化效果
根据图2所示的测试结果可以看出:不同分块交界处边缘明显亮过非边缘区域,说明不论如何添加噪声,该方法注意到了像素细节,不易受噪声条件干扰。可见该方法具有可行性。
2.2 采样效果测试
将本文方法与文献和文献方法进行对比,将文献中的构像质量评价方法和文献中的奇异值分解方法分别记为传统方法1和传统方法2,三组优化方法在应用过程中,为了填补影像阴影部分,都会利用各自的方法,补偿压缩影像阴影部分的分辨率,而这一过程需要对影像进行特征采样,图3为三个测试组的特征点采样定位效果图(如图3所示):
根据图3所示的测试结果可知,文中优化方法采用3次综合定位的方法,获取像素点。而两个传统方法分别选择2次和1次定位方法,获取像素点。为了保证测试结果的误差最小,共进行6轮特征点采样定位,三组特征点与最优特征点之间的定位差距(如表1所示):
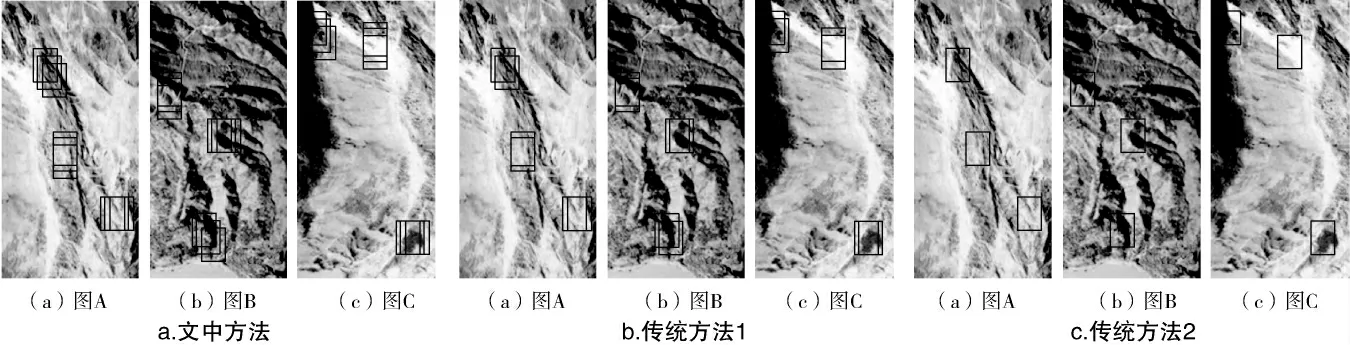
图3 特征点采样定位效果图
表中的正数表示方向X上的定位差异;负数表示方向-X上的定位差异。为了便于比较,统计表1中三组方法的平均定位差距,分别为0.0517mm、0.345mm以及0.4167mm。计算三组方法之间的特征点定位差异,可知文中方法的定位结果,比传统方法1低了0.2933mm;比传统方法2低了0.365mm。可见文中提出的优化方法,在补偿阴影像素时,可能会得到更好的分辨率优化结果。因此选择一个固定的测试对象来源,分别利用三组方法对同一分辨率的测绘遥感压缩影像,进行质量优化,比较不同方法的优化效果。
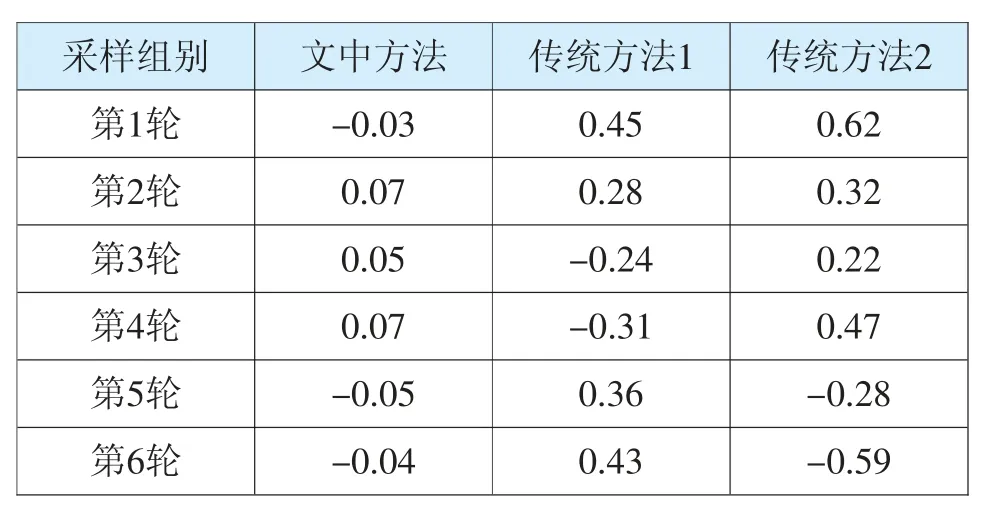
表1 特征点定位差距(mm)
2.3 LIVE图像数据库实验
为比较各个优化方法的性能,采用视频工程实验室LIVE提供的图像数据库展开测试。该数据库中满足测试要求的遥感压缩影像共982幅。利用三组优化方法,优化LIVE图像数据库中的低分辨率压缩图像。三种优化方法应用下,压缩影像的质量评价结果(如图4所示):
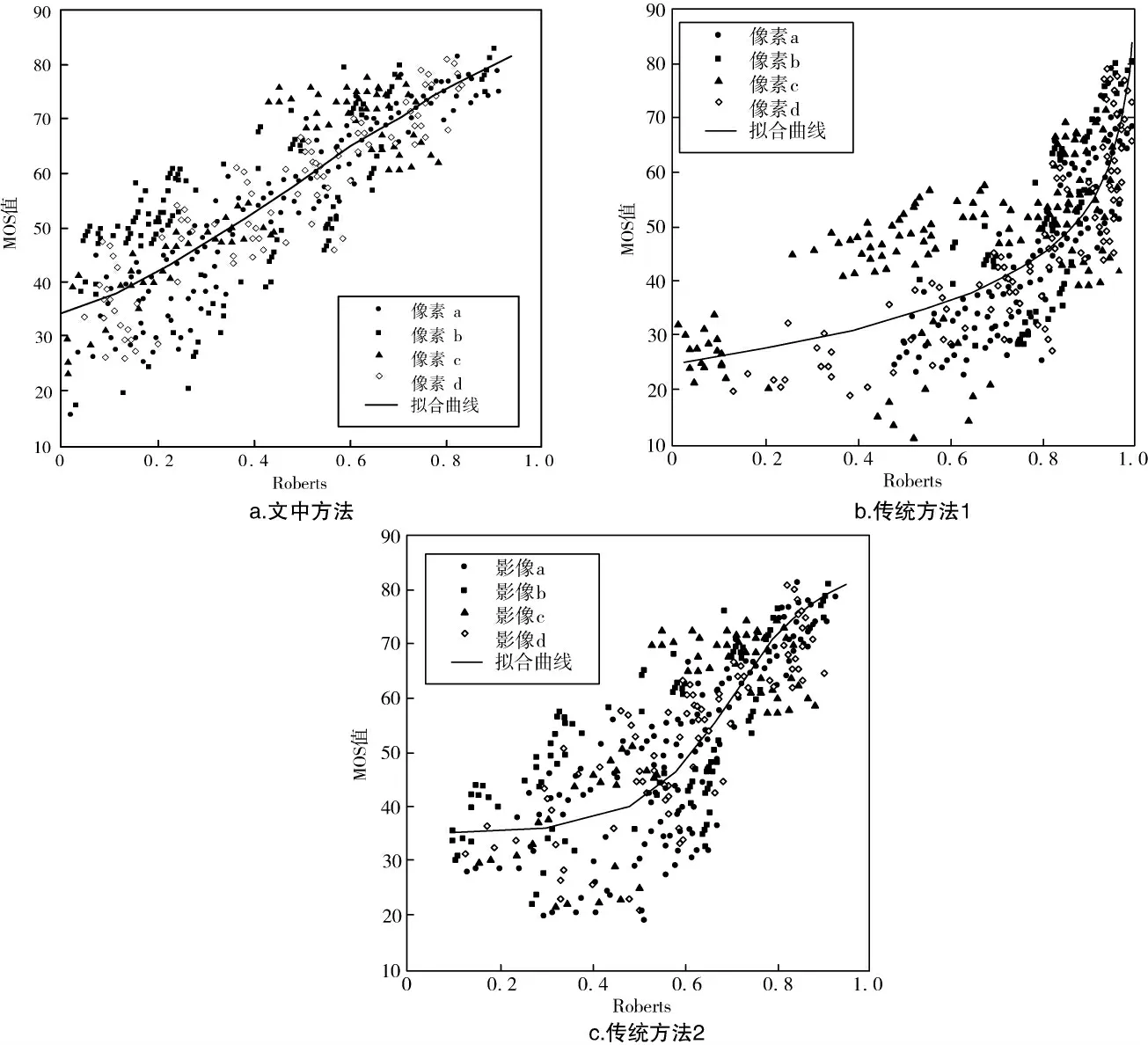
图4 优化后的压缩影像质量评价结果
根据上述质量评价结果可知:两种传统方法处理海量的压缩影像时,在恢复压缩图像的过程中,各个像素点明显脱离拟合曲线,可见传统方法面对像素点数据时,其融合效果明显弱于文中提出的优化方法。然后计算各个优化方法应用下,影像分辨率评价指标(如表2所示):
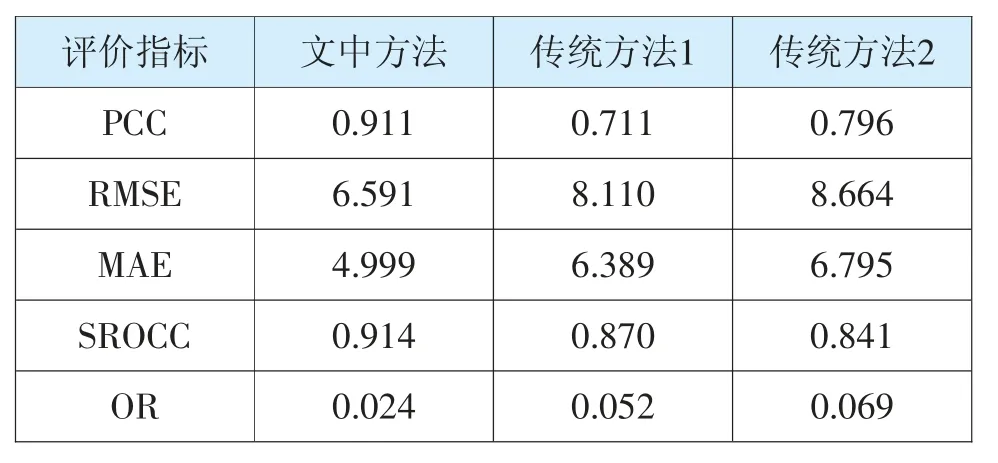
表2 文中方法与传统方法的优化性能对比
表2中的5项评价指标分别为相关系数、均方根误差、平均绝对误差、秩相关系数以及离出率。根据表2中的计算结果可知,文中方法对于LIVE图像数据库中,低分辨率的压缩影像,有更好的优化效果。
3.结束语
此次研究在传统优化方法的基础上,利用全卷积神经网络代替经典神经网络,实现了对压缩影像的分辨率优化。但全卷积网络在恢复压缩图像时,容易忽略相邻像素间的类别相关性,因此使用该神经网络时,要注意条件随机这一使用条件。