基于车载雷达技术的城市部件普查研究
2021-09-27吕志慧
李 真,吕志慧,张 浩
(1.江苏省测绘研究所,江苏 南京 210000;2.江苏省基础地理信息中心,江苏 南京 210000)
城市部件普查工作是数字城管建设的基础。通过城市部件普查,可以更好地掌握城市部件的具体内容、数量、地理位置以及基本属性信息(如部件状态、权属单位、养护单位等),为数字城管建设提供基础地理数据。传统方法主要是通过已有地形图调绘或全野外实测的方式来完成部件的定位工作,存在工作效率低、定位困难大、属性记录困难、数据库建立复杂等问题。利用车载雷达(LiDAR)技术进行城市部件调查可以有效解决上述问题,通过车载LiDAR快速扫描部件信息,采集的点云信息准确定位部件,采集的全景照片展现部件的形态信息。
近年来,利用测绘新技术进行城市部件普查也取得了一些进展,如王万峰[1]等基于城市立面街景影像与部件地图、属性关联技术,提出了一种基于地图、部件属性库和多角度影像的城市部件管理的新手段;何昌清[2]等利用车载移动测量系统完成了成都市新津县的城市部件调查工作,即新津县城管局“数字城管”项目第三期工程;徐建新[3]等利用中国测绘科学研究院自主研发的SSW车载激光建模测量系统对南京市仙林地区进行了数据采集;孔维华[4]等以淄博市高新区城市部件调查数据处理为例,研究了利用GIS技术处理城市部件调查数据的主要流程。本文以中海达iScan移动采集设备为载体采集点云和全景影像,并对采集数据进行内业加工处理;再根据点云以及对应的全景照片采集城市部件,从而为交通等部门服务。
1 总体技术路线
利用车载LiDAR技术进行城市部件普查主要包括外业采集和内业处理两个部分,其中外业采集主要是利用移动采集设备对测区进行街景采集,采集内容包括点云数据、全景影像数据、定位定姿数据等;本文主要介绍内业处理部分。利用车载LiDAR技术进行城市部件普查的处理流程如图1所示。

图1 城市部件普查处理流程图
2 内业处理流程
2.1 全景照片拼接
街景内业处理前,需对外业采集的全景照片进行拼接处理,本文采用中海达提供的全景照片拼接软件进行拼接。全景照片拼接的原理是在照片重叠部分利用多个同名点对图片进行两两拼接,最终将4张照片拼接成一张全景照片。拼接前后效果如图2、3所示。

图2 全景照片拼接前效果
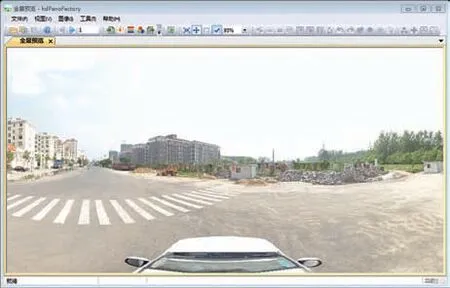
图3 全景照片拼接后效果
2.2 全景照片处理
1)照片分发主要是将照片按照路线分别存放,便于后续点云照片配准等内业处理工作。本文利用全景分发软件进行全景照片的分发处理。
2)缩略图生成。拼接后的全景照片数据量较大,而在进行后续检查点云、照片配准、部件采集等内业工作时,无需高清的全景影像,只需压缩后的全景照片即可。
3)检查点云与照片的配准。街景采集数据经过融合解算处理后,点云与全景数据理论上是完全匹配的,但由于人为操作、外界干扰等因素影响,全景影像可能出现旋转、偏移等现象,需在后续处理中调整全景照片的6个参数,使其与点云一一匹配重合,方便后续作业。
2.3 城市部件采集
城市部件从所属类别上可划分为公共设施类、道路交通类、市容环境类、园林绿化类、房屋土地类、其他设施类以及扩展部件类等7大类、86小类,包括绿地、行道树、交通信号灯、交通标志牌等。
根据城市部件的密度、高度等,本文将城市部件采集过程划分为:
1)较高部件采集。较高部件采集包括两种方式:①直接在二维图中采集;②在三维视图中采集。在二维视图中,与行道树采集类似,由于路灯、交通指示牌等部件具有一定的高度,在点云中呈现红色,参照对应的全景照片进行部件采集即可。在三维视图中,首先切换至三维视图,将点云与全景照片进行叠加(图4),可以很清楚地在三维视图中找到城市部件所在位置,然后在点云的最底部进行城市部件采集。

图4 路灯部件采集
2)井盖和雨水篦子采集。由于井盖、雨水篦子等部件位于地面,没有一定的高度,因此经过点云与照片配准后,在三维窗口中参照对应的全景照片进行采集。采集完成后,可在二维窗口中显示,如图5所示,在三维窗口中对井盖数据进行采集,而在二维窗口中高亮显示的点数据即为采集的井盖数据。

图5 井盖部件采集
在点云俯视图中,根据高度对点云进行过滤,只留下距离地面一定距离的点云,由于井盖和雨水篦子大多接近于地面,点云扫描时经常未能扫描到或仅有少量点云覆盖,呈现黑色区域,较容易区分,因此结合对应的全景照片,也可对井盖和雨水篦子等部件进行采集。如图6所示,在二维视图中对点云进行过滤,可以看出在黄色线框内有一处黑色无点云区域,结合对应的三维视图中的全景照片,即可确定该处为井盖。

图6 地面点云过滤后井盖采集
3)绿地采集。由于绿地部件一般面积较大,且绿地一般高度一致,在点云俯视图中,色块颜色一致,能较容易地辨别出来,因此在点云俯视图中直接对绿地的边界进行勾画采集。需要注意的是,由于激光测量无法对物体的背面进行点云采集,因此绿地采集只能作为参考,无法对绿地边界进行精确采集,尤其是高度较高的绿地。结合三维视图中的全景照片可知,绿地呈现为一定规则形状的蓝色区域,沿着蓝色点云边界对绿地部件进行采集。采集结果如图7所示。
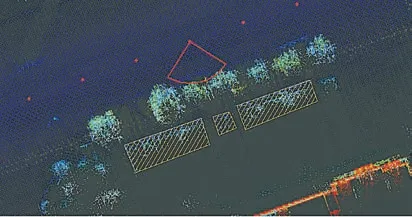
图7 绿地部件采集
4)水域护栏、交通护栏、绿地护栏等采集。水域护栏、交通护栏、绿地护栏等部件为线型部件,由于线型部件的长度约束,同一部件在一张全景照片中可能显示不完全,或在一张全景照片中可以显示完全但距离相机较远,无法保证采集精度,因此线型部件的采集一般在点云俯视图中进行,参照对应的全景照片,可以较容易地对线型部件进行采集。如图8所示,参照全景照片发现,黄色线框区域内的蓝色直线为交通护栏区域,在二维窗口中可直接对蓝线部分进行采集,采集结果如图9所示。

图8 护栏部件采集前效果

图9 护栏部件采集后效果
5)其他部件采集。其他部件采集包括点型部件采集、线型部件采集和面型部件采集。①点型部件采集:在点云俯视图中采集点型部件时,与行道树等部件的采集方法类似,参照对应的点型部件全景照片,找出点型部件对应的点云位置,并进行采集。点型部件对应的点云位置查找方法大致分为根据高度信息查找和根据形状信息查找两种,其中根据高度信息查找,适用于较高部件,由于点云数据根据由高至低呈现由红到蓝的RGB颜色过渡,因此较高的点型部件的点云会呈现较红的颜色,容易辨别;根据形状信息查找,适用于具有一定面积或较大的部件,如公交站亭、跨河桥、重大危险源等,在二维点云视图中根据部件的形状可较容易地采集部件。②线型部件采集:一般在二维视图中进行,与水域护栏、交通护栏、绿地护栏等部件采集方法类似,参照对应的全景照片,在二维窗口中可较容易地对线型部件进行采集。③面型部件采集:在基本部件类型中,面型部件仅为绿地一种。
3 结 语
通过实验分析可知,基于车载LiDAR技术的城市部件普查可有效解决传统作业方式中存在的人工投入大、经费高、安全系数低、更新慢等问题。
1)利用车载LiDAR技术进行城市部件普查的工作效率可比传统作业模式提高数倍。
2)利用车载LiDAR技术进行城市部件普查,仅需两名作业人员利用移动测量设备进行外业采集,并可对采集的数据进行半自动化内业处理。该方式大大减少了人员投入、缩短了更新周期,有效解决了传统作业方式的弊端。
3)利用车载LiDAR技术进行城市部件普查是在可量测的实景影像上进行部件采集,精度较传统作业模式更加有保障。
4)利用车载LiDAR技术进行城市部件普查的结果不仅可为交通部门进行部件数据统计、更新等提供方便,而且可为国土部门的地形图更新等工作提供便利。同时,传统的城市部件普查结果单一,仅为部件数据本身;而该模式可获得点云、全景照片等数据,实现一次采集、多次利用的目标。
不可避免的,利用车载LiDAR技术进行城市部件普查还存在一定的局限性,主要表现为:
1)采集范围受限。利用车载LiDAR技术进行城市部件普查是以移动采集车为载体进行的数据采集,只能在可通车的道路上进行采集,步行街、小巷等区域无法采集,采集范围受到限制;同时,由于点云采集的局限性,房屋背面、绿化带内侧等无法获得点云数据,部件采集时会有所遗漏,需要外业调绘时进行补充。
2)部件位置难以区分。部分细小的部件在点云中难以区分,如与地面齐平的井盖等部件,在二维视图中较难区分,难以采集,只能在三维视图中进行采集;而在三维视图中,由于地面的点云数据稀少,井盖等较小部件面积较小、点云较少,采集具有一定的难度。
