电网频率扰动下并网变换器系统暂态稳定性分析
2021-09-25唐英杰付熙坤查晓明
闫 寒,黄 萌,唐英杰,付熙坤,查晓明
(武汉大学电气与自动化学院,湖北省武汉市 430072)
0 引言
随着新能源大规模并网,越来越多的电力电子变换器被用作分布式能源与交流电网的接口。与此同时,电力电子装备也给电网的安全稳定运行带来影响。与传统高惯性同步发电机不同,电力电子变换器在电网扰动下具有更为快速和复杂的暂态过程,对并网变换器系统的安全、稳定运行会造成一定的影响。新疆哈密地区发生的风电机组群次/超同步振荡、河北沽源地区发生的双馈风电机组群与串联补偿电网相互作用的次同步谐振[1]等表明对并网变换器系统进行暂态稳定性研究是必要的。
在并网过程中,锁相环(phase-locked loop,PLL)被广泛用于电压信号的实时跟踪,为并网变换器提供频率以及参考相位。传统的分析方法采用小信号线性化方法将锁相环与并网变换器统一建模,例如基于阻抗模型[2]、状态空间模型[3]的分析方法。鉴于上述2种模型的局限性,基于拉普拉斯(s)变换的节点导纳矩阵的网络谐振结构分析法[4]和幅相模型[5-7]等被进一步提出并用以分析含非同步机电源系统在不同时间尺度下的动态特性。研究结果表明,高锁相环带宽[2]以及锁相环引入的负阻抗[8]都会对系统稳定性造成危害。
在非理想电网条件下,锁相环由于鉴相作用而存在固有的非线性特性,对并网变流器系统的稳定性造成影响。传统的锁相环线性化模型不能完全描述锁相环的暂态过程,需要对其非线性特性进行分析。文献[9]分别从非线性动力学以及虚拟同步机的角度揭示了锁相环的数学和物理本质,并采用李雅普诺夫能量函数分析了锁相环的稳定条件。文献[10]将锁相环近似等效为同步发电机,并用等面积定则(equal-area criterion,EAC)解释了带锁相环的并网变换器失稳机理。然而,EAC的这类应用并不能完全代表锁相环的控制特性[11-12]。文献[11]对比了在电网对称故障下各分析方法的优缺点。文献[13]通过建立降阶非线性模型来解释锁相环的不稳定过程和再同步瞬态过程,定性分析了锁相环控制参数对暂态过程的影响。
当负荷突变或发电机投入、切除时,系统的功率输入、输出都会产生不平衡。当系统受到扰动时,功率将重新分配,系统输入、输出功率在一定电压、频率水平下将呈现不同的暂态特性[14]。文献[15]指出,当负载增加时,电网频率下降,同步发电机转速降低,从而向电网释放能量。在文献[11-12]中,对锁相环二阶微分方程的推导是基于电网频率不变的假设,适用于电网阻抗变化和电流变化的情况。若电网发生频率扰动时,对锁相环二阶微分方程的推导,则不可避免地要考虑频率的变化。
本文针对弱电网条件下的频率扰动工况,推导了锁相环与电网相角差的暂态输出方程。基于非线性动力学的多尺度法[16],定量解析了频率扰动下锁相环的二阶微分方程,进一步分析了误差产生的原因。基于解析解,得出暂态稳定判据,为锁相环的参数设计提供参考。
1 频率扰动下锁相环的二阶微分方程
本文关注锁相环受到扰动后的暂态过程,在对电压环以及电流环进行参数选择时,按稳定点在工作点附近进行处理。若电流环响应速度足够快,则可以对其进行解耦,并直接给定电流参考值,因此可设定Id=Idref,Iq=Iqref。其中Id、Iq、Idref、Iqref分别为电流环电流的d轴、q轴分量以及相应的参考值。并网变流器系统的拓扑结构如图1所示。其中,Ut∠θt、Vg∠θg、E∠θ分别为公共耦合点(point of coupling,PCC)电压、电网相电压以及并网逆变器输出端口电压;Udc为直流侧电压;θpll为锁相环输出相角;ωn为固有角频率,其值为100π;ω为系统角频率;t为时间变量;Lf和Cf分别为滤波电感和滤波电容;Ls和Rs分别为电网电感和电网电阻;R和C分别为直流侧稳压电阻和稳压电容;ia、ib、ic为线路三相电流。

图1 并网变流器系统结构及锁相环控制Fig.1 Structure and PLL control of grid-connected converter system
由文献[15]可知,由输入、输出功率不平衡造成的频率变化率(rate of change of frequency,RoCoF)在一次调频的最初阶段,可以认为以固定斜率k变化。因此,基于锁相环的时间尺度,本文将频率扰动设为一次函数。在此基础上,可以基于文献[12]推导出在频率扰动下锁相环输出相角的二阶微分方程。
在弱电网中,稳定状态下的PCC处电压可以表示为:

式中:Zs和θs分别为电网阻抗幅值和相角;I1和θ1分别为并网变换器等效电流源的电流幅值和相位。
电流环电流d轴分量设为0,此时θ1=θpll,进一步对式(1)进行dq分解,得到Utq如式(2)所示。

式中:Utq为PCC处电压幅值的q轴分量。
根据图1可以得到θpll如式(3)所示。

式中:Kp和Ki分别为锁相环控制器的比例系数和积分系数。
当电网频率从50 Hz以斜率k线性变化时,电网阻抗与电网角频率、电感、电阻的关系可进一步表示成式(4)。

式中:ωpll为锁相环角速度;δ为相位差。
将式(2)代入式(3),可以进一步推导出考虑频率扰动时相位差δ的二阶微分表达式,如式(5)所示。

2 基于多尺度法的解析求解方法
电网频率扰动的存在,使得式(5)存在显含时间的项,对其解析求解存在困难。由于δ的二阶微分方程和非线性动力学的研究对象有相似之处,本文借鉴单自由度非自治系统的多尺度解法,对其进行求解。
2.1 多尺度法的基本原理
文献[16]指出,多尺度法的基本原理是微扰法,也称摄动法。它把微分方程的解x(t)视为很多快慢不同时间尺度或变量的函数,从而适用于求取弱非线性系统的瞬态解。
由于微扰法可能会产生长期项,多尺度法可以对这一现象进行改进。多尺度法把微分方程的解不只看作是单一时间自变量t的函数,而是把t,εt,ε2t等看成独立自变量,利用不同尺度的时间变量,使得渐进解在ε指定阶次的范围内得出一致有效解。
2.2 二阶微分方程的解析求解
假设δ受到扰动后存在新的稳态点δ0,为了简化计算过程以及应用多尺度法,需要对式(5)在新的稳态点处进行泰勒展开。在扰动较小时,可以舍去三次及以上高次项,式(5)可以进一步化简为:

式中:a、b、c、d、e、f、g为相应的泰勒展开系数。
式(6)的推导过程见附录A式(A1)和式(A2)。由于gt项的存在,在运用多尺度法进行求解的过程中,依旧不可避免地存在长期项,而非线性动力学中的方法更多的是针对外施激励为周期函数的系统,因此,如果能够将gt项转化为周期函数,则能降低解析难度。考虑到锁相环输出相角在暂态过程中的时间尺度较小,因此可以在时间的一定范围内将一次函数处理成正弦函数。附录A图A1给出了将一次函数正弦化处理的比较结果。该结果表明,当正弦函数周期越大时,正弦函数与一次函数保持较小误差的时间跨度越长。因此,式(6)在0≤t≤tmax(tmax是正弦化函数与一次函数保持较小误差的最大时间)范围内可以被进一步近似等价为:


引入变量α、β、γ、λ、η,并令a=εα,b=εβ,c=εγ,e=ελ,f=εη,则有:

引入2个时间尺度T0和T1,式(7)的一次近似解为:


将式(9)代入式(7),并令方程等号两侧ε的同次幂系数相等,进一步消除长期项。当ΩT0尽可能小时,在消 除 长 期 项 过 程 中,cos(ω0T0+θ(T1)±μΩT0)(μ为 正 整 数)项 可 以 与cos(ω0T0+θ(T1))项 合 并,sin(ω0T0+θ(T1)±μΩT0)项 可 以 与sin(ω0T0+θ(T1))项合并,可以得到:

式中:m1为引入的参数。
对式(10)进行积分,可以得到:

式中:m为引入的参数。
根据实际运行工况,初值可以写为:

式中:B0为δ在t=0-时刻的初值。
将式(14)代入式(9),可以得到:

于是得到式(6)的一次近似解:
式(16)等号右边的第1项为自由振动项,第2项为强迫振动项,强迫振动项是由外施激励引发的。根据式(16),在非共振情况下,若自由振动部分随着时间的增加而衰减,则稳态响应将仅由强迫振动的解构成。
3 解析解的相关讨论
3.1 误差分析
在k为-2,Kp分 别 为0.02和0.01时,附 录A图A2给出了方程(5)的数值解(采用ode45解法)与解析解的比较结果。改变锁相环比例参数,在振荡收敛或振荡发散状态时,解析解在前几个振荡周期皆与数值解一致。随着振荡误差的累积,强迫振动的斜率在后期会出现一定的偏差。上述现象产生的原因有以下几点。
1)由于式(5)求解困难,因此为了符合应用多尺度法的微分方程形式,用于求解解析解的式(6)是在式(5)的基础上通过泰勒展开并舍去高阶项处理得来的,从而振荡的幅值和相位会与实际情况有所出入。当δ振荡幅值越大时,误差也就越明显。此外,因为式(16)中Af与ω0有关,而ω0正是由于上述处理得来的,所以强迫振动的斜率也会与实际斜率有误差,在2~4 s时解析解与数值解振荡斜率分别约为-0.011 6和-0.012 6(见附录A图A2)。
2)解析解是一次近似解,而不是式(6)的精确解,进一步求取其二次、三次近似解,可增加解的精度。
3)当时间跨度足够大时,由于一次函数项与正弦项误差较大,式(7)与式(6)不再等价,此时此解析解便不再适用。
3.2 显含时间项的二阶微分方程的解
当Ω足够小时,在一定时间范围内式(17)成立。

虽然非线性微分方程不满足叠加原理,但是研究结果表明,在一定情况下,显含时间一次项的非线性微分方程的解的形式可以看作非线性解与线性解的叠加。式(5)等号右侧的一次项影响的是强迫振动的斜率。
由于锁相环路方程有其具体的物理背景,因此也可以认为电网频率的扰动使得电网阻抗值发生变化,δ的稳态值也在不断地变化,因此式(18)成立。

基于锁相环路方程及其物理意义,可对解析解的强迫振动斜率进行修正。基于式(18)进行解析解修正,可以使解析解的强迫振动斜率与数值解更吻合(见附录A图A3)。
3.3 稳定边界
式(5)中有显含时间的一次项,因而δ存在强迫振动。在非共振情况下,δ是由非线性解析函数决定的自由振动与强迫振动的组合;当自由振动衰减后,就只剩下强迫振动。在非共振情况下求解稳定边界时,解析解中的强迫振动项不会对系统稳定性造成影响。经推导,m可展开为:

式中:ωvir为固有角频率的修正值。
图2(a)至图2(d)分别给出了在Kp-Ki-I1、Kp-Ls-I1空间内m等于0时的稳定边界曲面及几组Ki和Ls参数下的边界曲线。在这里将m称作“判据值”。m小于0绝对发散,可将满足m小于0的参数区域视为振荡发散域,m大于0的参数区域视为振荡收敛域。若绝对收敛还需要进一步满足式(21)。

式(21)与系统初始运行状态有关,若不能满足,则锁相环输出也将振荡发散。在图2(a)至(d)中,随着Kp增大,电流I1非线性增加,Ki和Ls的增大皆会使边界曲线向下偏移。电网参数和控制参数的变化,可能使得原先的稳定点变为不稳定,如点A至点C(I1增大)、点D至点C(Kp减小)所示。解析解得到的稳定边界可以在一定程度上指导锁相环的控制参数设计。

图2 在不同空间内的稳定边界Fig.2 Stability boundary in different spaces
4 仿真及实验验证
用于仿真验证的Simulink模型参数设置如下:电网相电压(峰值)Vg=155 V;电网电感Ls=3 mH;滤波电感Lf=1 mH;滤波电容Cf=25μF;直流侧电压Udc=380 V;直流侧稳压电阻R=0.01Ω;直流侧稳压电容C=4 000μF;电网基准频率f=50 Hz;电流环比例系数Kip=2;电流环积分系数Kii=20。为了验证解析判据的有效性,基于上述参数以及图2的稳定边界,在k=-2的前提下设置如表1所示的4种仿真验证工况,可以得到图3所示仿真结果以及图4所示相图。
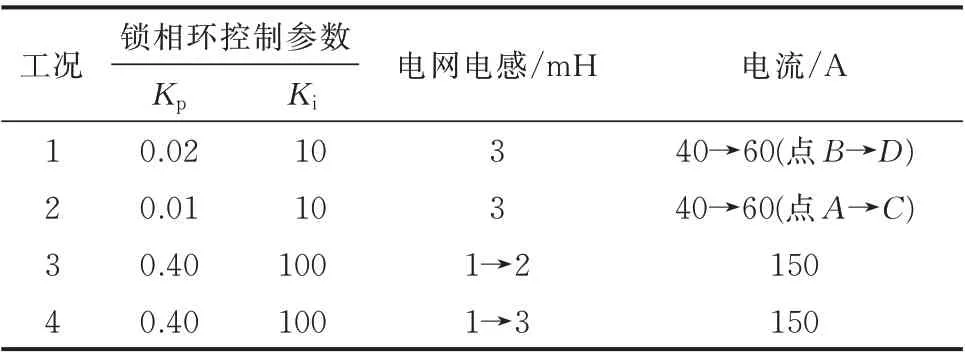
表1 仿真验证工况设置Table 1 Settings of operation conditions for simulation verification
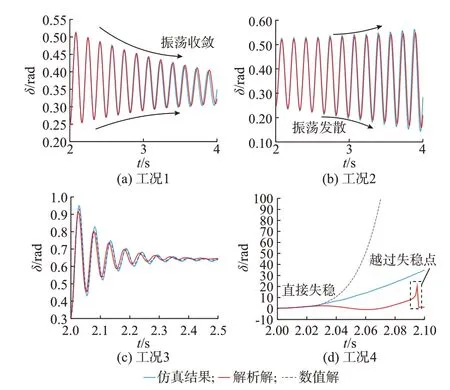
图3 锁相环二阶微分方程一次近似解与仿真结果的比较Fig.3 Comparison of first-order approximate solutions to second-order differential equation of PLL and simulation results
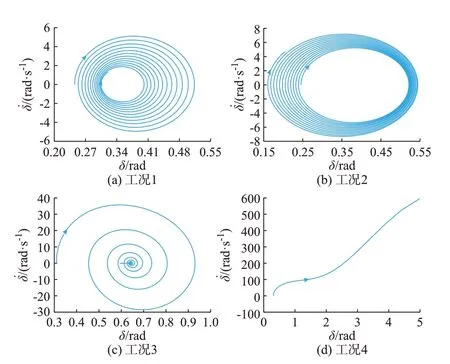
图4 锁相环输出相角相图Fig.4 Phase diagram of PLL output
工况1和2设置了电流扰动,工况3和4设置了电网电感扰动。在图2中,工况1和3均在稳定域内,工况2和4均在失稳域内。图3(a)至图3(d)分别给出了4种工况下的仿真结果与解析解和数值解的对比结果。由图3可得以下结论。
1)图3(a)中δ振荡收敛,图3(b)中δ振荡发散,2种工况下解析解与仿真结果皆比较吻合;仿真收敛和发散结果与图2稳定域判定结果一致。
2)图3(c)中δ振荡收敛,解析解与仿真结果的幅值误差约为0.035 rad,周期误差从0逐渐增大,而原始方程的数值解与仿真结果的幅值误差约为0.017 rad,其原因可能是解析解的局限性以及仿真中电流环、开关动态等的影响;仿真收敛和发散结果与图2稳定域判定结果一致,在这种工况下,误差未对判别结果造成影响。
3)在图3(d)中,解析解、数值解与仿真轨迹不相符合,但稳定判别结果与图2一致:数值解与仿真结果不符合是因为系统失稳,电流发散,不符合所建微分方程模型的前提(即稳态点附近电流值设为固定不变);在2.09 s左右时,δ的解析解越过不稳定点失去稳定,但由于解析解表达式中的分母存在极点,在计算过程中虚部被忽略,故出现了如图3(d)所示越过稳定点的现象;而解析解与数值解不符合是因为扰动过大、泰勒展开的高次项被忽略引起的。
4)由图3(a)和图3(c)相比可知,工况3条件下δ的收敛速度较快;由图3(b)和图3(d)相比可知,工况4条件下δ的失稳速度较快。这与解析解的判据值m绝对值的大小相关。
解析解判稳结果与仿真结果的对比如表2所示。通过对比工况1和2或工况3和4的判据值m可以看到,在m大于0且满足式(21)的前提下,δ振荡收敛,且m值越大,收敛效果越明显;在m小于0时,δ振荡发散或直接失稳,m绝对值越大,δ发散速度越快。

表2 4种工况下的解析稳定判断及仿真验证结果Table 2 Analytical stability judgment and simulation verification results under four operation conditions
图4(a)至图4(d)给出了4种工况下的锁相环输出相角相图,其中,δ˙表示δ的一阶导数。可以看到,图4(a)和(c)中锁相环输出逐渐收敛,图4(b)和(d)中锁相环输出逐渐发散或直接失稳,相图结果与图2稳定域判定结果一致。图3和图4结果表明,相图分析结果与解析结果在δ的敛散性上具有一致性。
综合以上分析:在暂态响应方面,在δ波动幅度较小时,解析解可以很好地展现锁相环受扰时的暂态过程;当振荡幅值较大时,因解析解本身的局限性,其与数值解和仿真结果不一致,此时从波形上看是不符合的。在判断稳定性方面,由于稳定性和临界状态紧密相关,因此第1个振荡周期的有效性即可使解析判断稳定结果有效,而鉴于图3(c)的误差,可在对锁相环进行参数设计时留有一定的裕度。m绝对值的大小可在一定程度上衡量稳定/不稳定裕度的大小。
为了进一步对稳定边界进行验证,对工况3和工况4进行了并网逆变器的硬件在环实验。实验装置如附录A图A4所示,并网逆变器的主电路在RTLAB实验平台上建立,控制部分由DSP 28335数字控制平台实现。图5给出了硬件在环实验结果。

图5 实验验证结果Fig.5 Results of experimental verification
图5(a)中PCC处A相 电 压Va和A相 电 流Ia经过振荡恢复稳定,由于电网阻抗增大,电压的幅值有所下降,锁相环与电网的相角差δ在扰动后0.4 s左右稳定在新的稳态值(约0.65 rad),并进一步随着电网频率而变化。图5(b)中,系统公共耦合点处电压和电流直接失稳,锁相环与电网的相角差δ迅速增大并达到了限幅值(约5.03 rad)。这2种工况下的实验结果进一步验证了稳定边界的有效性。
5 结语
本文针对电网频率扰动时弱电网中锁相环输出相角的二阶微分方程,推导了解析解及稳定边界,通过仿真及实验,得到以下结论。
1)仿真波形及实验结果表明,基于非线性动力学多尺度法的解析解及稳定边界具有可行性及有效性。
2)由于求解近似解时忽略了高阶项,以及对小参数进行了一次近似,相角暂态表达式存在一定误差。但是在一般扰动下,解析解完全可以用来分析锁相环在不同电网工况下的稳定性。
3)解析结果表明,电网阻抗、注入电流的增大导致m减小并越过临界值,锁相环失稳;在一定范围内增大锁相环比例-积分控制器比例系数、减小积分系数,有利于锁相环的快速稳定。
本文仅针对单个变换器锁相环进行分析,今后拟对多变换器系统锁相环稳定性现象及原因进行分析,并在现有研究的基础上,进一步探究多变换器系统之间的交互机理。
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx),扫英文摘要后二维码可以阅读网络全文。
