基于改进型自抗扰的双级矩阵变换器控制策略研究
2021-09-25谢祖德唐勇奇邓一凡贺书航
谢祖德,唐勇奇,邓一凡,贺书航
(湖南工程学院 电气与信息工程学院 风力发电机组及控制湖南省重点实验室,湘潭411104)
0 引言
双级矩阵变换器(Two-Stage Matrix Converter,TSMC)是一种新型的交流变换器,它在继承传统矩阵变换器(Conventional Matrix Converter,CMC)优越输入输出性能的基础上,简化了控制策略[1],应用前景更为广阔.此类变换器由于缺乏中间直流储能环节,导致输入和输出的两级耦合严重,更容易受到外界干扰的影响.双级矩阵变换器的传统闭环控制策略通常采用PID控制、调制策略优化、积分控制等方法,但这些控制方法想要达到好的控制效果都需要有精确的数学模型[2-4].由于自抗扰控制技术不仅对控制对象模型的要求较低,而且具有很好的鲁棒性,因此广泛应用于电力变换器控制.本文提出了一种改进型二阶自抗扰控制策略,该方法能够有效抑制负载突变扰动的影响,提升系统的动态响应速度以及抗扰动能力,保证了变换器在复杂情况下的稳态输出性能.
1 TSMC拓扑结构以及数学模型
1.1 TSMC的拓扑结构
TSMC的拓扑结构如图1所示,其中包含交-直(整流)和直-交(逆变)两级变换电路,中间直流侧无储能模块,整流级和逆变级采用双向开关(由两个单向开关组成).TSMC的优越性在于它实现了整流级与逆变级在实际电路结构上的物理分离,从而简化了调制策略和换流方法.如果能够保证直流电压极性为正,逆变级可采用单向开关,这样就得到如图2所示的18开关双级矩阵变换器拓扑结构[5].
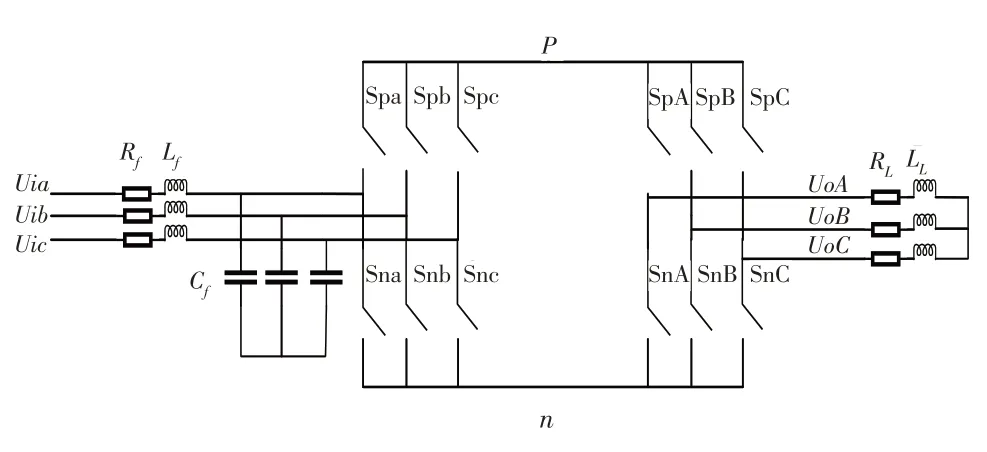
图1 双级矩阵变换器拓扑结构图

图2 18开关双级矩阵变换器拓扑结构图
1.2 TSMC的数学模型
双级矩阵变换器主电路包含整流级和逆变级两级,三相交流输入电压通过整流级的调制转换成中间直流侧的PWM电压,然后再经过逆变级的调制将PWM电压转换成期望输出的三相电压.由于外界干扰对整流级的影响可以转化为直流侧的电压波动,所以逆变级的控制效果直接决定了双级矩阵变换器的输出性能,因此在本文输出电压的瞬时反馈控制中,以TSMC逆变级作为闭环控制对象.逆变级主电路由逆变级开关电路、输出滤波器以及负载组成,如图3所示.R代表电感损耗、线路阻抗及开关损耗的总效应,L为滤波电感,C为滤波电容.

图3 TSMC逆变级主电路图
则其状态方程可表示如式(1)
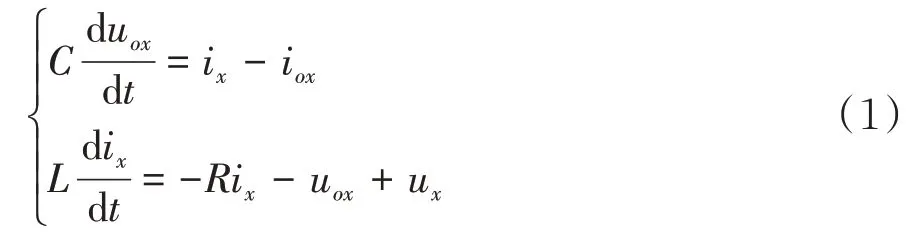
式(1)中:uox和iox为滤波后的三相输出负载电压和电流;ix为矩阵变换器的输出电流;x=A,B,C.
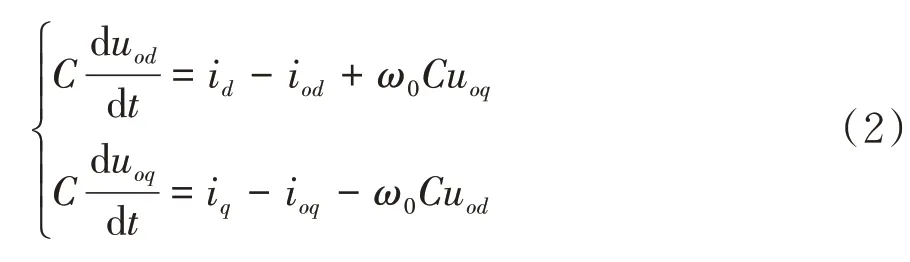
经过Park变换后双级矩阵变换器输出电流和负载电压的dq轴模型如下[6]:

2 自抗扰控制技术
2.1 自抗扰控制器工作原理
自抗扰控制(Active Disturbance Rejection Control,ADRC)能够自动检测系统数学模型并且实时观测外部扰动,然后对系统的总扰动进行实时补偿.被补偿的分量并不区分内扰和外扰,而是直接检测并补偿其总和,补偿分量的作用实质上是一种抗扰作用[7],所以称其为自抗扰控制器.
ADRC的组成有:跟踪微分器(Tracking Differentiator,TD)环节、扩张状态观测器(Extended State Observer,ESO)环节、非线性状态误差反馈律(Non-linear State Error Feedback law,NLSEF)环节[8].以二阶被控对象为例,其采用的ADRC结构如图4所示.TD根据给定的参考输入v(t)安排好系统的过渡过程,并得到其近似跟踪信号v1(t)和跟踪微分信号v2(t).3阶ESO观测并估计被控对象输出信号y(t)的各阶状态变量z1、z2和系统总扰动的实时作用量z3;NLSEF通过对TD的输出和ESO的输出进行作差,求得各阶状态的误差信号e1、e2,然后经过NLSEF内部的非线性规律组合得到被控对象所需要的控制量u0(t),并且引入z3对系统总扰动的补偿作用进而得到最终的控制量u(t).

图4 二阶自抗扰控制器结构图
各模块方程为:

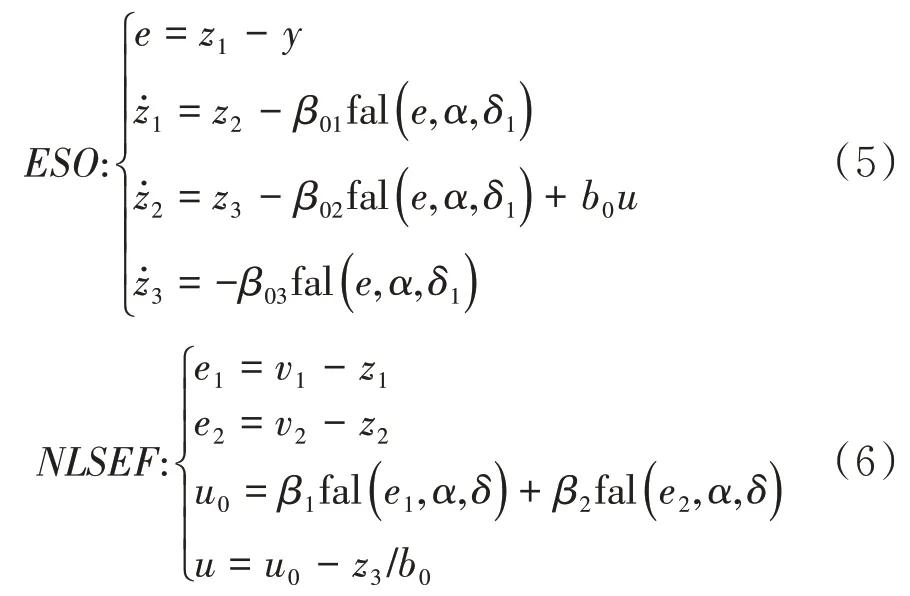
其中,

式中:r为速度因子,δ为滤波因子,e为信号误差,α为可调参数,b0为补偿因子,β01,β02,β03为观测因子,β1、β2是NLSEF的增益系数.
2.2 改进的自抗扰控制算法
自抗扰控制器的主要部分包括TD、ESO和NLSEF.本文从系统的稳态性能方面考虑,对非线性误差反馈控制律部分进行改进,引入类积分环节从而提升系统稳态性能.
改进的NLSEF参考了PID思想,把其中的可调参数β1和β2对应于PID中的比例增益与微分增益,对误差量e1进行积分从而得到类积分项,其可调参数β3就是类积分增益,如图5所示.
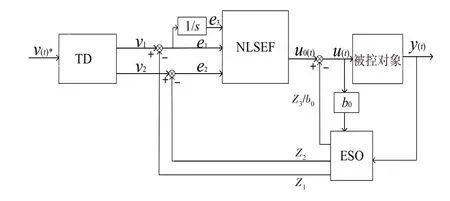
图5 改进型自抗扰控制器结构图
改进后的NLSEF表达式如下:

改进的非线性误差反馈控制律环节输入量为误差量e1、误差的微分量e2以及误差的积分量e3,通过这三者的非线性组合构成了系统的未补偿控制量u0.类积分环节的引入使得控制系统进一步调高了稳态性能.
先独立地设计自抗扰控制器的TD、ESO和NLSEF三个模块,再将设计好的三个模块组合形成最后的自抗扰控制器.改进型自抗扰控制器主要参数整定原则如下:
TD环节里的调节参数是速度因子r和滤波因子δ0.r取值小时能够有效地抑制超调;r取值越大,控制器的响应速度越快,精度越低.δ0取值大时可以加强滤波效果,但不能过大,太大的δ0易使得控制器出现超调现象.
ESO环节里的调节参数主要有补偿因子b0、线性因子δ1和观测因子β01、β02、β03.一般b0的取值范围为0.01~10.δ1反映了fal函数在线性段的长度,δ1太大,那么fal函数的主要部分为线性函数,丧失了非线性函数的优点;δ1太小会使得fal函数等效于开关函数,这样往往会导致原点处附近出现高频振颤现象.观测因子β01、β02、β03则需要对不同控制系统反复试凑才能得到最佳值.
NLSEF环节里的调节参数主要是β1、β2和β3.增大类比例增益参数β1,能够削弱系统静态误差,但会增加系统的超调量;增大类微分增益参数β2,可以有效抑制系统超调,实际应用时应综合考虑二者的作用;增大类积分增益参数β3,能够提高系统的稳态性能,但对动态过程有一定影响.
3 基于改进型ADRC的TSMC逆变级双闭环控制系统
系统输出电压的给定信号通过电压定向分解到d、q轴得到ud*和uq*,同理可以获得其反馈信号ud和uq,分别设置一个改进型ADRC模块在电压环的d、q轴上.电压环改进型ADRC模块的输出成为电流环改进型ADRC模块的电流给定信号,然后按照同样的方法获得电流环的反馈信号,误差信号经过电流环改进型ADRC模块产生的控制量通过处理后形成逆变级部分的开关函数Tinv.由于本文整流级部分直接开环处理,所以需要给定整流级部分的开关函数Trec.双空间矢量调制模块有了开关函数Trec、Tinv就能对主电路两部分的开关进行协调控制.只要合理地设计改进型ADRC模块的各部分参数,控制器就能够明显抑制外界非理想扰动带来的影响,保障双级矩阵变换器的优良输出特性.

图6 基于改进型ADRC的TSMC双闭环控制系统框图
式(2)中ω0Cuoq和-ω0Cuod相当于耦合项,-iod和-ioq相当于不确定项,两部分之和即为系统电压环dq轴上的总扰动.同理,式(3)中的ω0Liq和-ω0Lid可看成是dq轴上的耦合项,而-uod和-uoq为不确定项.两部分之和即为系统电流环dq轴上的总扰动.由于d轴和q轴的改进型ADRC设计方法相同.下面以d轴为例分别设计电压环和电流环改进型ADRC控制器.

图7 电压环改进型自抗扰控制器
其中:

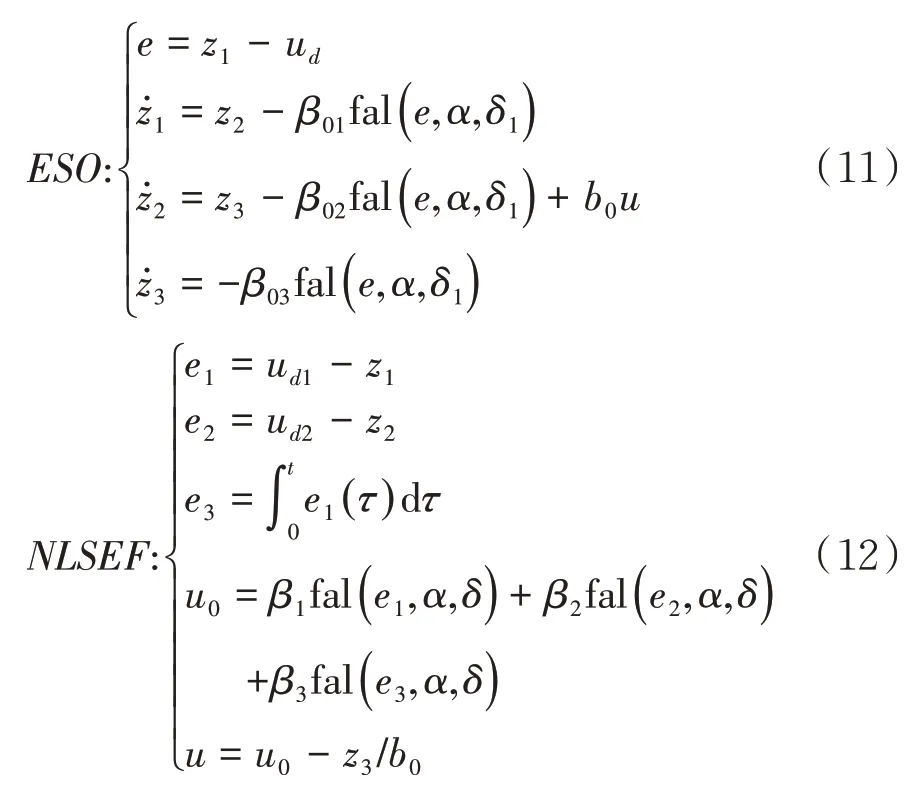
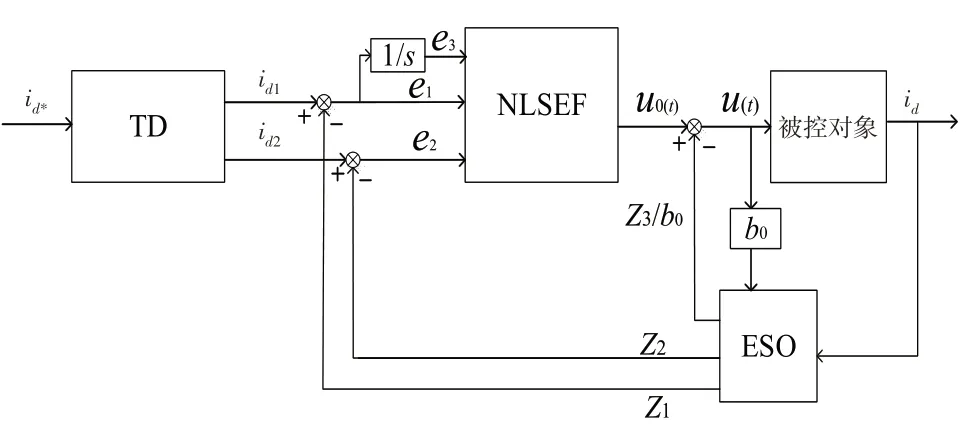
图8 电流环改进型自抗扰控制器
其中:

4 仿真分析
为了验证上述控制策略的有效性,在Matlab/Simulink中分别搭建了基于PID控制和改进型ADRC控制的双级矩阵变换器系统仿真模型,进行对比仿真分析,外界干扰为在0.05 s时突加三相平衡阻感负载和突加三相不平衡阻感负载这两种情况.
主要参数:输入为三相对称正弦电压,相电压幅值uim=310 V,频率f=50 Hz;PWM周期T=0.1 ms;输入滤波模块Lf=0.5 mH,Cf=45μF;输出滤波模块Lf=1 mH,Cf=17μF,负载为三相星型对称电阻负载,每相电阻5Ω;仿真算法为ode45 s.电压指令ud*=310 V,uq*=0 V.
ADRC的参数设置为:r=4×106,δ0=0.01;ESO:β01=3×104,β02=2.7×104,β03=5.4×105;α=0.2,δ=0.01;NLSEF:β1=0.22,β2=0.3,α=0.25,δ1=0.01;b0=2.
(1)突加三相平衡阻感负载(电阻5Ω,电感1 mH)
由图9的d轴电压波形对比分析可知,在面对突加三相平衡阻感负载的外界干扰的情况下改进型ADRC控制系统的电压波动幅值更小,恢复正常的速度更快.

图9 (a)PID控制策略d轴电压波形
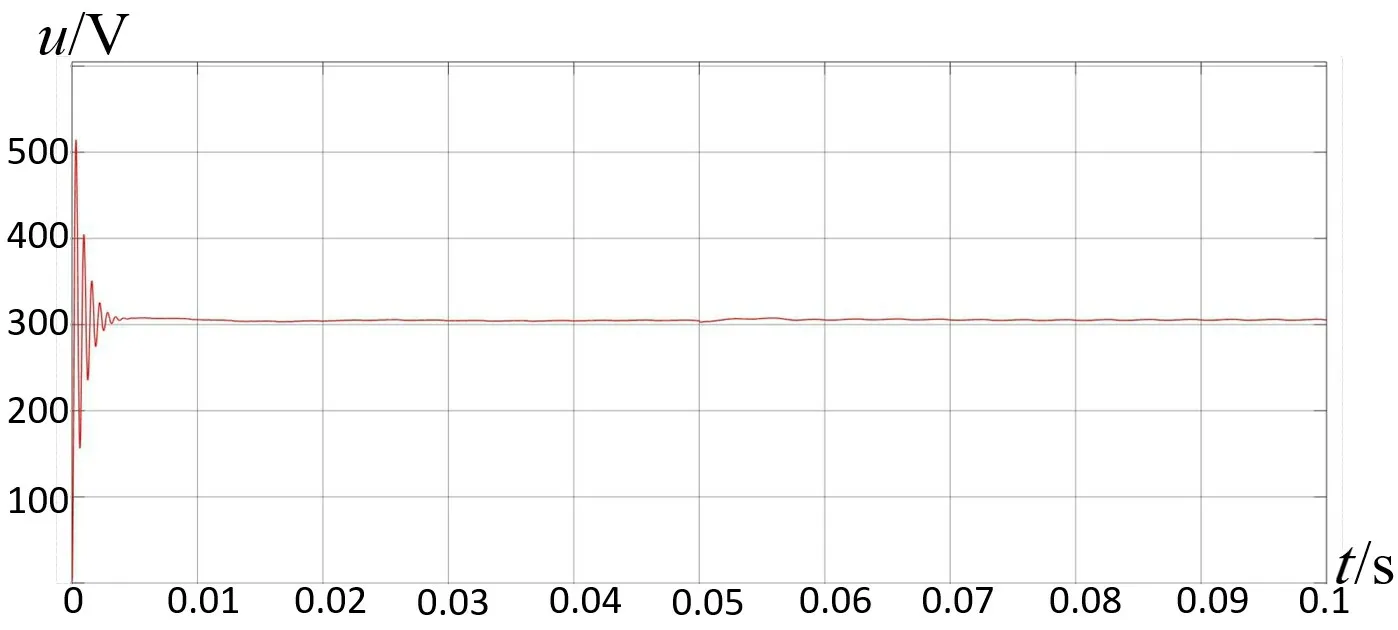
图9 (b)改进型ADRC控制策略d轴电压波形
由图10的三相电压波形对比分析可知,在面对突加三相衡阻感负载外界干扰的情况下改进型ADRC控制系统的电压输出基本无明显变化,而PID控制系统的电压输出有十分明显的电压尖峰.
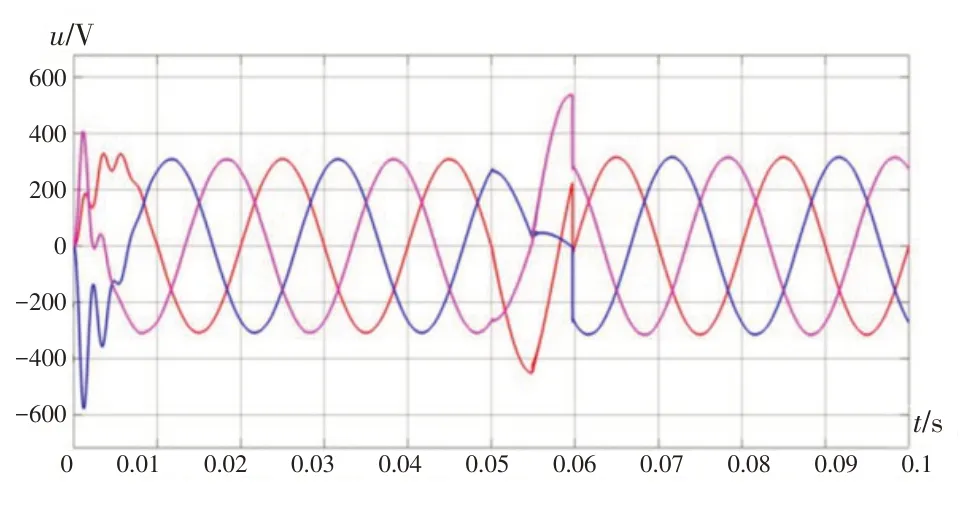
图10 (a)PID控制策略三相电压波形

图10 (b)改进型ADRC控制系统三相电压波形
(2)突加三相不平衡阻感负载(ac相电阻5Ω,电感2 mH,b相电阻10Ω,电感4 mH)
PID控制系统在面对突加三相不平衡阻感负载时虽然d轴电压受到的影响还不明显,但是电压输出波形已经无法保持对称输出;而改进型ADRC控制系统在这种干扰情况下仅在0.05 s时刻有轻微的电压波动,依然保持优良的三相电压输出波形.
图11 (a)PID控制系统d轴电压波形
图11 (b)改进型ADRC控制系统d轴电压波形
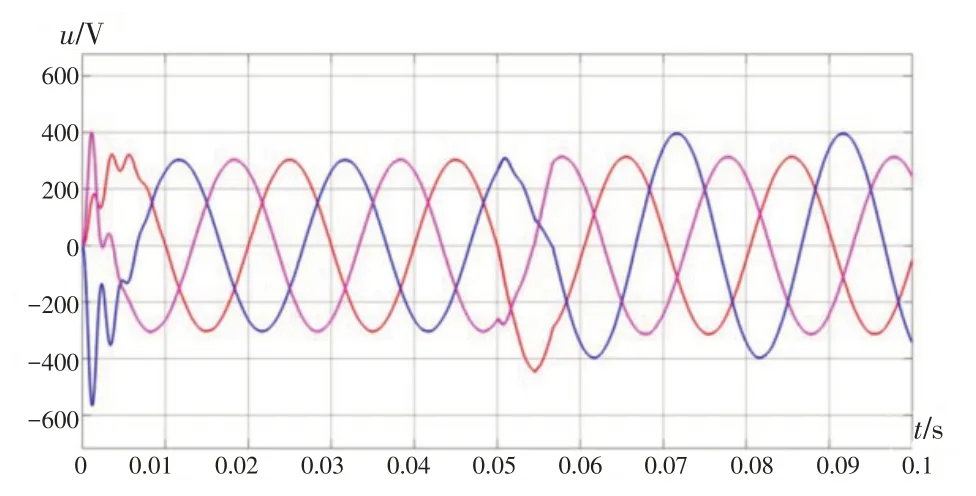
图12 (a)PID控制系统三相电压波形
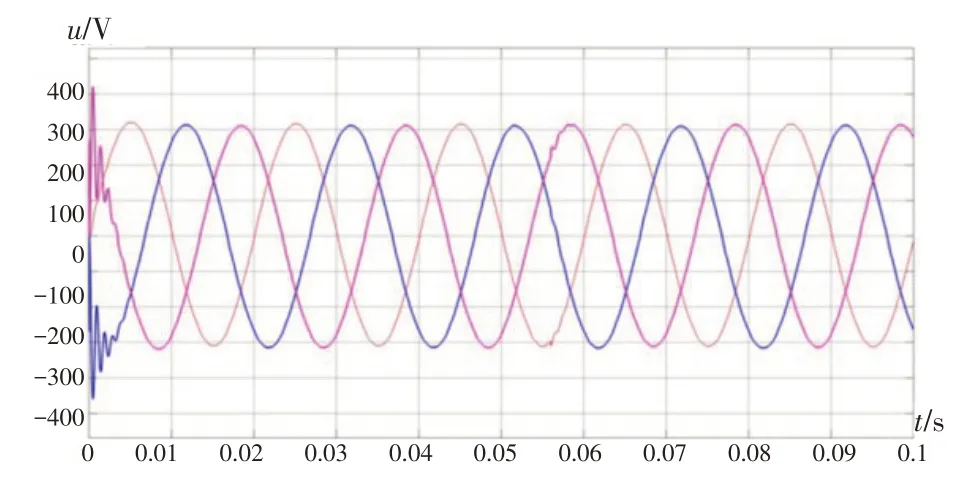
图12 (b)改进型ADRC控制系统三相电压波形
综上两种控制策略仿真分析可以发现,TSMC系统中PID控制策略的抗干扰性能远不如改进型ADRC控制策略,说明改进型ADRC控制策略能有效抑制突加三相平衡负载和突加三相不平衡负载干扰的影响.由此可见改进型ADRC控制策略的动态跟随性能和抗扰动能力突出.
5 结论
本文分析了TSMC的基本电路结构,介绍了自抗扰控制技术,提出了一种改进型二阶自抗扰控制策略,然后针对TSMC的逆变级闭环控制系统设计了电压电流环的改进型二阶自抗扰控制器.通过对比仿真分析得出:基于改进型ADRC的控制系统在突加三相平衡负载的情况下不仅电压能够更快速地恢复正常,而且波动峰值也明显变小;应对突加三相不平衡负载的情况下输出电压也基本没有明显波动.在相同的非理想工况下,改进型ADRC控制策略抑制外界干扰的能力明显优于传统PID控制策略,更能保障变换器在复杂情况下的稳态输出性能.
