机器视觉在智能设备装配中识别引导功能的研究
2021-09-24孙倩崔晓玉姚广芹
孙倩 崔晓玉 姚广芹

摘要: 现代化工业生产是基于智能技术、信息技术,从自动识别到自动执行,机器视觉作为智能化辅助生产技术之一,其重要性不言而喻。本文通过对机器视觉在智能设备装配中识别引导功能进行分析研究,通过结合实际案例方式,对识别引导功能进行阐明,为下一步工作开展奠定基础。
Abstract: Modern industrial production is based on intelligent technology and information technology. From automatic identification to automatic execution, machine vision is one of the intelligent auxiliary production technologies, and its importance is self-evident. This paper analyzes and studies the recognition and guidance function of machine vision in the assembly of intelligent equipment, and clarifies the recognition and guidance function by combining actual case methods to lay the foundation for the next step of work.
关键词: 机器视觉;智能设备;识别引导
Key words: machine vision;intelligent equipment;recognition guidance
中图分类号:P415.1+3 文献标识码:A 文章编号:1674-957X(2021)18-0213-02
1 机器视觉技术概述及应用意义
机器视觉技术涉及计算机视觉、图像处理、模式识别、人工智能、信号处理、机电一体化等多个领域,作为一门新兴技术,伴随着人工智能技术的快速发展推动新一轮产业革命的到来。機器视觉技术的最大优点是与被测对象无接触,因此,对观测者与被观测者都不会产生任何损伤,十分安全可靠,这是其它感觉方式无法比拟的,而且机器视觉可以观察到人眼看不到的范围,如红外线、微波、超声波等,并且机器视觉可以利用传感器形成红外线、微波、超声波等图像。另外,人无法长时间的观察对象,机器视觉则无时间限制,而且具有很高的分辨精度和速度,显示其无可比拟的优越性。故机器视觉技术系统在工业、农业、交通、医疗等行业得到了广泛的应用。本文是在发动机零部件(挺柱)的自动化装配过程中,采用机器视觉辅助,视觉相机拍照对挺柱位置确定,并通过机器视觉引导机械夹爪旋转挺柱至标准角度等自动化装配流程。视觉识别引导技术在机械手装配柔性智能自动化作业中起到良好的作用,一方面提高了机械抓手对物体的精准定位与稳定抓取转角纠正;另一方面提高了生产效率,并且在精度、质量和速度都比人工具有巨大的优势。
2 机器视觉技术识别引导功能应用原则
机器视觉是基于人工智能化创新优化,从降低人工操作及介入,符合信息现代化工业生产加工需求的一种技术保障,在机器视觉技术识别引导功能应用设计中需强调原则性、方向性,具体如下:第一、以代替人工及缓解人工疲劳为原则,在识别引导功能应用中是出于对传统人工操作形式的智能优化,功能设计与具体应用一定要从增加智能效应、解放人工劳累层面入手;第二、以客观精确及成本低为原则,机器视觉技术识别引导功能应从客观、精确、低成本方面入手,将工业智能识别的整体过程精确稳定给予体现,实现工业流水线中的智能化重复操作,简化复杂繁琐的机器视觉识别引导流程。
3 机器视觉硬件选择方案——以发动机零部件为例
3.1 光源系统选择 在进行光源系统选择中一定要注重结合性,对所需智能设备装配流程进行了解掌握,这样便于提升机器视觉识别引导效率,本从研究主要以环光选择类型为主,如下:第一、对光源安装的具体距离进行掌握,并对部分角度光源进行过滤,如通过对光源安装尺寸高度进行调整,可对大角度光源进行有效过滤等。第二、该光源类型相对目标面积不大,主要关键面在于表面中间,如可采用小尺寸0角度或小角度光源等。第三、目标识别范围可进行光源调节,角度选择性较大,如可采用90度角环光,也可采用大尺寸高角度环形光等。同时,选择背光源/平行背光源,具体如下:第一、选择背光源需按照具体物体范围、大小等对背光源进行适度调整,有效控制成本增加及浪费。第二、由于背光源主要受外壳遮挡,这样就导致亮度一般会低于中间位置,所以在对背光源进行选择中,应避免目标位于背光源边缘。第三、在检测轮廓中主要采用波长较短的光源,光源波长一旦较短,其衍射性会较弱,这样会避免图像边缘中的重影出现,且对比度也颇高。第四、在实际应用中可对背光源进行调整,将与目标之间的距离以最佳效果呈现。第五、检测液位可以将背光源侧立使用;圆轴类的产品,螺旋状的产品尽量使用平行背光源。
3.2 工业镜头选择 ①相关参数。第一、视场:指观测物体的可视范围,也就是充满相机采集芯片的物理部分。第二、工作距离:指从镜头前部到受检测物体的距离,即清晰成像的表面距离;第三、分辨率:图像系统可以测到的受检测物体上的最小可分辨特征尺寸,在多数情况下,视野越小,分辨率越好。第四、景深DOF:物体离最佳焦点较近或较远时,镜头保持所需分辨率的能力;第五、焦距f:透镜的光心到光聚集之焦点的距离。亦是相机中从镜片中心到底片或CCD等成像平面的距离。②远心镜头选择型号。在具体识别引导中建议选择云心镜头,采用科学合理的兼容CCD靶面尺寸,对远心镜头兼容的CCD靶面进行合理设计,要不小于或等于相关配套靶面,不然会直接影响其分辨率。在接口类型设置方面,远心镜头接口类型多为普通形式,包括C口,F口等,符合相关相机配套便可以,另外,在成像范围方面,当放大倍率和CCD靶面确定时,成像范围即确定,反之亦然。在工作距离方面,需关注工作距离能否对实际设备生产加工要求满足,如选择远心系统对其检测后,可首先对镜头进行选定,按照工作需求的实际距离对相关机械结构进行设计。最后,景深范围方面,要对上述条件进行满足,景深范围越大,说明远心系统的光学特性越好,在选型时可作为参考。
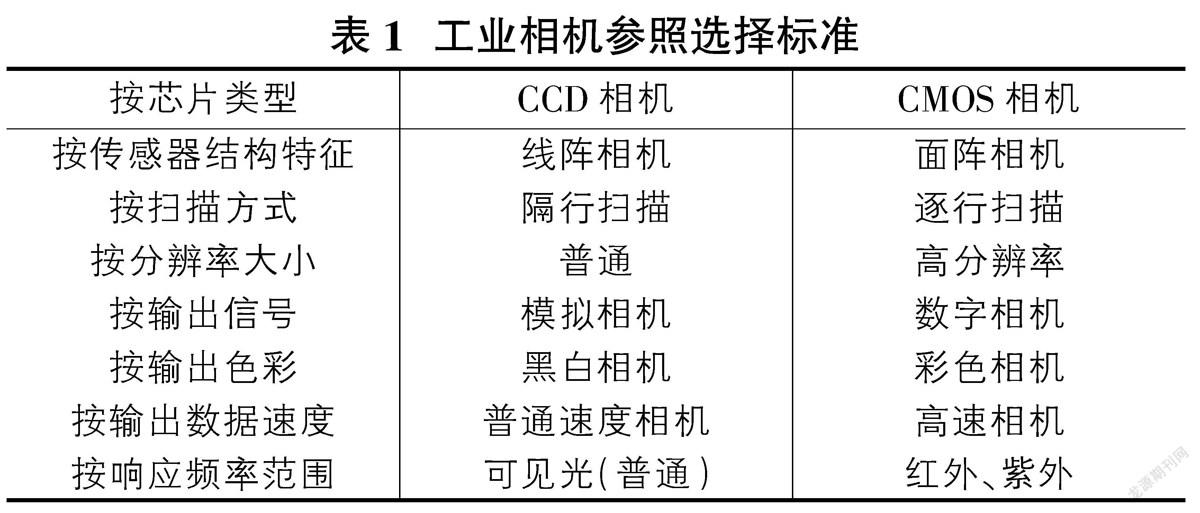
3.3 工业相机选择 相关参数:CCD芯片尺寸:特殊之处——1inch == 16mm != 25.4mm,相机芯片尺寸:镜头尺寸≥相机芯片尺寸,增益:通过调节电压放大环节调节圖像亮度(如表1)。
4 机器视觉在智能设备装配中识别引导功能体现
4.1 拍照识别及转角引导 首先要进行视觉定位,以发动机零件为例,机器视觉装置会在最短时间内对零件特征中的边界及质心进行快速识别,机器人控制系统采用逆运动原理,对机器人各关节位置的转角误差进行最大程度降低,充分解决机器视觉拍摄中的角度误差问题(如图1)。
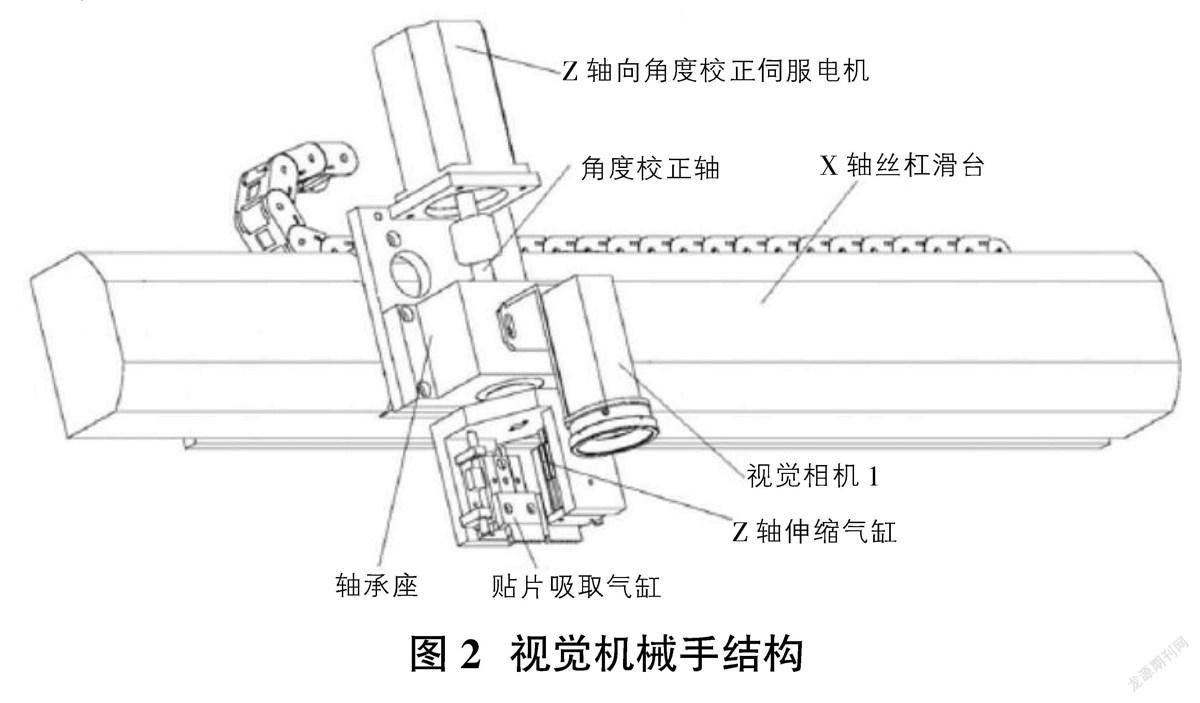
在视觉机械手安装中一定要侧重整体设计,本次设计中将机械手安装在横向布置结构的龙门型X轴向丝杠滑台之上,该视觉机械手横向移动配置主要由一台加设在丝杠滑台另一方的伺服电机装置进行驱动供给,进而可精确对发动机零件X方向定位。全面巩固该视觉机械手运行效率,伸缩气缸下端设计有两个贴片器件的拾取吸头,视觉机械手一次可以拾取和定位安装零件类器件。当该视觉机械手向右侧移动后,具体位置为装备配平台上方,此时零件装配平台Y在移动伺服电机装置作用下,开展前后方向运动,处于机械手旋转轴承座位置中的视觉相机,对该平台目标具体位置标示检测,该视觉相机对装配平台上的零件目标进行后标示后,确定了安装板的位置,这时,X 轴向伺服电机和Y向伺服电机快速移动以确定贴片器件的定位和安装位置,由该机械手开展装配操作。
其次待完成视觉拍摄后会对其图像进行智能化处理、智能化分析,对发动机零件进行角度引导,配合机械手完成作业操作。同时利用三维做图软件Soldworks、CAD、UG等软件对机械结构进行集成化设计,实现精确拍照及引导功能的实现。4坐标系夹爪机械手结构设计,包括气缸的选型和计算,保证4坐标的位置驱动;伺服电机的选型和计算,保证夹爪的精确抓取挺柱和挺柱的转角纠正,保证集成系统的结构稳定性和统一性。最后,利用Visionpro视觉软件进行图片的数字化处理,并通信给PLC。
4.2 PLC程序控制应用分析 随着我国科学技术不断提升,生产力及水平不断突破,针对生产加工与机械作业,一种新型管控模式应运而生,即PLC,可编程逻辑控制器。该控制器主要是针对机械生产及加工过程,通过存储器创新升级植入编程方法。主要以内部完成程序存储为主。并对逻辑算法及控制顺序等进行工作开展。如算数操作、定时或相关计数等。其实质性是一种面向用户的高端控制指令。在输入及输送方面主要采用模拟信号、数学信号等方式,实现对各种类型机械的生产加工控制。(如图2)
在机器视觉智能设备装配识别引导中通过PLC程序控制、通信技术完成实现,通常PLC智能芯片植入方式,对机器视觉识别流程及步骤进行设计,提出视觉识别引导程序理论,该理论主要以强化识别引导的精准性、步骤性为主,有效自动执行PLC程序指令,在实际设备装配作业中待完成视觉识别扫描后,会对机械手发出同步指令,机械手会根据PLC控制指令完成分拣装配操作等。
5 结论
综上所述,通过对机器视觉在智能设备装配中识别引导功能进行分析研究,主要包括:光源系统选择、工业镜头选择、工业相机选择、拍照识别及转角引导、PLC程序控制应用分析等,将机器视觉在智能设备装配中识别引导中价值意义给予明确,为现代化工业生产管理水平提升奠定基础。
参考文献:
[1]Sture, ye E R, Skavhaug A et al. A 3D machine vision
sys-tem for quality grading of Atlantic salmon[J]. Computers and Electronics in Agriculture,2016(123):142-148.
[2]Ziatdinov M, Maksov A, Kalinin S V. Learning surfacemolecular structures via machine vision[J]. npj Computational Materials,2017,3(1):3.
[3]Fernández-Robles L, Azzopardi G,Alegre E,et al.Ma-chine-vision-based identification of broken inserts in edge- profile milling heads [J]. Robotics and Computer -Integrated Manufacturing,2017(44):276-283.
[4]Kavitha C,Ashok S D. A new approach to spindle radial-error evaluation using a machine vision system[J].Metrology and Measurement Systems,2017,24(1):201-219.
[5]欧阳智,肖旭.机器视觉在智能制造中的应用[J].大数据时代,2018,12(3):11-14.