基于一体化控制的三电机同步系统研究
2021-09-24尚庆华马保慧
尚庆华,马保慧
(1.天水电气传动研究所集团有限公司,甘肃 天水 741020;2.大型电气传动系统与装备技术国家重点实验室,甘肃 天水 741020)
随着中国的工业升级,多电机同步控制在工业控制领域的应用更加广泛,工业控制领域中多电机同步协调控制性能的优劣直接影响工业的生产质量和生产效率,因此研究多电机同步控制成为了实现工业自动化的趋势。
多电机系统是一个多输入多输出、强耦合、时变的非线性系统。多电机控制系统现有的控制方案主要以PID控制为主,同步协调控制是多电机系统的基本要求,PID控制器解耦性能较差,运行状态的改变、负载扰动都会影响控制的精度,参数整定较为困难,参数的鲁棒性差,无法达到满意的控制效果,无法共同满足快速性、准确性的要求。在多电机系统中张力与速度之间存在一定耦合,电机的状态相互影响,实现同步协调控制,不仅仅是各个电机同步运行,还要保证张力的控制。实现多电机同步协调系统中张力和速度的解耦,使得张力不受速度变化的影响。针对多电机控制系统中同步协调问题,以及速度和张力的解耦问题成为研究的热点。
在文献[3~4]中将自抗扰引入多电机控制系统,以及在自抗扰的基础上进行优化。文献[5]中将智能算法引入多电机同步系统,通过各种优化智能算法,对于传统的PID控制中的一些不足加以改进,提高了系统的抗干扰性能,但依赖于系统的精确模型。文献[6]提出将虚拟主轴引入多电机同步控制系统,电机之间不再有主从之分,并在其基础上进行优化,可以有效地提高系统的同步性能。文献[7]采用了最小二乘支持向量机控制。文献[8]提出将模糊PID引入多电机同步控制系统,并在其基础上进行改进,有效地提高系统的同步性能。文献[11]将滑模控制引入多电机同步控制系统,滑模算法具有很多算法无法比拟的优点,且获得了较好的控制性能。然而,上述方法在应用于多电机同步控制系统中存在耦合问题,较难确定耦合规律,而且使用多个控制器势必导致系统运算复杂,计算工作量较大,跟踪性能大打折扣,无法实现张力和速度较好解耦,控制器之间存在耦合,参数较多,同步控制系统调整性能差。
为了实现多电机系统更优的速度、张力解耦,降低系统对于参数的依赖性,本文提出一种基于一体化控制的多电机同步协调控制方法,该方法通过引入反步控制,进一步提升了多电机系统的同步协调能力,并提高了控制精度。基于反步递推控制的思想,保证系统的稳定性,有效提高了速度、张力的解耦能力。仿真结果验证了本文提出的一体化控制方法和传统PID在速度、张力解耦和同步协调方面具有较强的适应性。
1 多电机同步调速系统
多电机同步系统结构图如图1所示,图中控制器控制三台变频器分别驱动三台交流异步电机,由此构成了三电机同步协调系统,实现了张力、速度解耦控制。电机分别为1、2、3号,其中1号为主电机,2、3号为从动电机,三台电机通过减速后,再驱动滚轮运转,滚轮通过皮带相连,控制相邻电机的速度差来控制张力。根据虎克定理得到张力表达式。

图1 三电机协调系统结构图
主电机和#2号从动机两个电机之间的张力F12表达式为:

两个从动机#2、#3间的之间张力F23表达式为

式中,K1=E/V1、K2=E/V2分别为传递函数;T1=L1/AV1、T2=L2/AV2为张力变化常数;A是皮带截面积,E是皮带的弹性模量;L1、L2分别是1、2电机、2、3电机的间距;V1、V2是预期的速度;r1、r2、r3是驱动滚轮的半径;k1、k2、k3是驱动滚轮的速度比;Wr1、Wr2、Wr3是各个电机的角速度;np1、np2、np3是各个电机的极对数;从张力表达式可以看出,电机速度Wr1和电机之间的张力F12、F23存在耦合现象,对于单一变量的控制不能很好地实现同步协调控制,因此要进行解耦。
三电机系统数学模型为:

式中,J1、J2、J3是电机各自的转动惯量,Lr1、Lr2、Lr3是电机转子电感,Tr1、Tr2、Tr3是转子时间常数,TL1、TL2、TL3是三电机各自的负载转矩,φr1、φr2、φr3是电机转子磁通。
2 基于PID控制的多电机同步控制系统
在多电机同步协调控制系统中,PID控制应用最为广泛,图2是基于PID控制的三电机同步控制系统结构图。

图2 PID三电机协调系统结构图
多电机同步协调系统是一个多输入多输出的强耦合非线性系统,三个输入变量且变量之间存在耦合现象所以采用三个PID控制器,分别为转速控制器、张力F12和F23控制器,转速反馈量采用光电编码器检测获取,张力反馈量则采用张力传感器测量得到。张力和速度之间存在耦合,通过控制相邻电机的速度差来控制张力,三个滑轮的半径不一致还需要进行折算,给定速度经过半径折算比例和张力F12控制器的输出共同作用来控制2号电机的速度,同理,2号电机的速度转换和张力F23控制器的输出共同作用来控制三号电机的速度。但是PID控制器参数较多,参数整定困难,参数敏感,外界运行状态的改变,都会影响系统的控制精度,参数的鲁棒性差,多电机系统是一个多输入多输出、强耦合、时变的非线性系统,且变量之间存在耦合,任意变量的改变都会影响系统的精度,PID控制器已经无法满足高性能同步性的要求。
3 基于一体化控制的多电机同步控制系统
针对PID控制存在的问题,本文提出基于一体化控制的多电机同步控制方法。一体化控制即将三个电机的三个控制器用反步控制器替换、整合为一。在解决变量耦合的同时,减少控制器的数量,间接提高了系统的带宽。最后,采用李雅普诺夫稳定性理论判断控制系统的稳定性。控制器要实现速度和张力趋向无差跟踪,以跟踪和镇定为主要目标。
3.1 反步控制原理
反步控制的思想是将复杂的非线性系统分解为不超过系统阶次的子系统,然后为每个子系统设计李雅普诺夫函数和中间虚拟控制量,在保证每个子系统稳定的前提下,推导出系统的最终控制律,实现整个系统的稳定控制。通过反向设计使得系统控制器的设计过程系统化、结构化,并且消除了经典无源性设计中相对阶为1的限制。反步法的理念是在每个子系统中引入虚拟控制,通过虚拟反馈,使得子系统的设计趋近稳定,引入误差变量,使得整个系统趋近稳定。图3是基于一体化反步控制的三电机同步控制系统结构图。

图3 三电机一体化控制系统结构图
3.2 基于一体化控制的多电机系统设计
根据数学模型,可将三电机系统设置为五阶子系统,因为存在耦合可将转速和张力形成递推子系统,使得跟踪误差渐进趋向稳定。本文采用李雅普诺夫稳定性理论判断反步控制系统的稳定性。
定义误差变量z。
第一步:速度Wr1反步控制器

其中Wr1ref是速度给定值,对于误差求导,

首先构造一个反步闭环控制系统的李雅普诺夫函数

对V1进行求导,将式(1)、(2)带入可得

为了稳定系统的误差,得出所设计的反步控制系统满足李雅普诺夫意义下渐近稳定的充分条件,选取

其中c1>0,
可得

第二步:张力F12反步控制器
定义误差:

其中F12ref是张力给定值,对于误差求导,

构造李雅普诺夫函数:

对V2进行求导,将式(6)、(8)、(9)带入可得,

选取虚拟控制量

其中c2>0,
可得

第三步:引入Wr2虚拟变量
定义误差:

求导得

构造李雅普诺夫函数:

对V3进行求导,将式(12)、(14)带入可得,

选取
其中c3>0,
整理后

第四步:张力F23反步控制器
定义误差:

其中F23ref是张力给定值,对于误差求导,

构造李雅普诺夫函数:

对V4进行求导,将式(17)、(19)带入可得

选取虚拟控制量

其中c4>0,
可得

第五步:引入Wr3虚拟变量
定义误差:

求导得

构造李雅普诺夫函数

对V5进行求导,将式(23)、(25)带入可得,

选取

其中c5>0,
可得

3.3 稳定性分析
本文采用李雅普诺夫稳定性理论判断反步控制系统的稳定性。首先构造一个反步闭环控制系统的李雅普诺夫函数,对其进行求导,由李雅普诺夫稳定性条件推导出变量的选取,引入了虚拟变量,经过理论分析可得出,只需要确定ci为非负数即可保证系统的稳定性,但在实际的工业控制中,其中的控制变量ci选取需要结合实际,参数对于系统的稳定性起了重要的作用,需要不断进行尝试。

4 仿真验证
4.1 系统实现
为了验证本文提出的基于一体化控制的多电机同步控制系统方法的可行性,仿真中所用电机参数如表1所示。

表1 伺服电机参数
4.2 解耦性能验证
初始速度Wr1给定25πr/min,张力F12给定60N,张力F23给定50N,在5s时速度Wr1由给定25πr/min突变至30πr/min,仿真结果如图4所示。

图4 张力速度对比波形
由图4可以得出,PID控制时候的调节时间ts为1.5s;而一体化控制方法下调节时间ts为0.18s。在速度突变的时候,PID控制对于张力影响较为明显,张力F12、F23的恢复时间为1.55s、0.8s;但是一体化控制方法速度突变对于张力影响较小,经过0.15s后张力恢复到给定。
初始速度W r1给定25πr/min,张力F12给定50N,张力F23给定40N,在10s时张力F12由给定突变至60N,张力F23由给定突变至50N。仿真结果如图5所示。

图5 速度张力对比波形
由图5可以得出,在张力突变时PID控制,张力突变时速度经过1s后恢复给定,在一体化控制下影响较小,几乎一次性达到系统的稳定状态。在速度突变、张力不变和速度不变、张力突变的情况下,基于一体化控制可以更好实现张力、速度解耦。
4.3 跟踪性能验证
在张力给定的情况下,初始速度给定为幅度为20、频率为1rad/sec的正弦波信号,仿真结果如图6所示。

图6 速度正弦波对比波形
由图6可以得出,采用PID控制时,正弦波的速度跟踪时间滞后0.1s,响应的稳态误差ess为3.75%,采用一体化控制方法时,几乎可以达到无差跟踪。
在张力给定时,初始速度给定为幅度为50到80、周期为2s的三角波信号,响应曲线如图7所示。
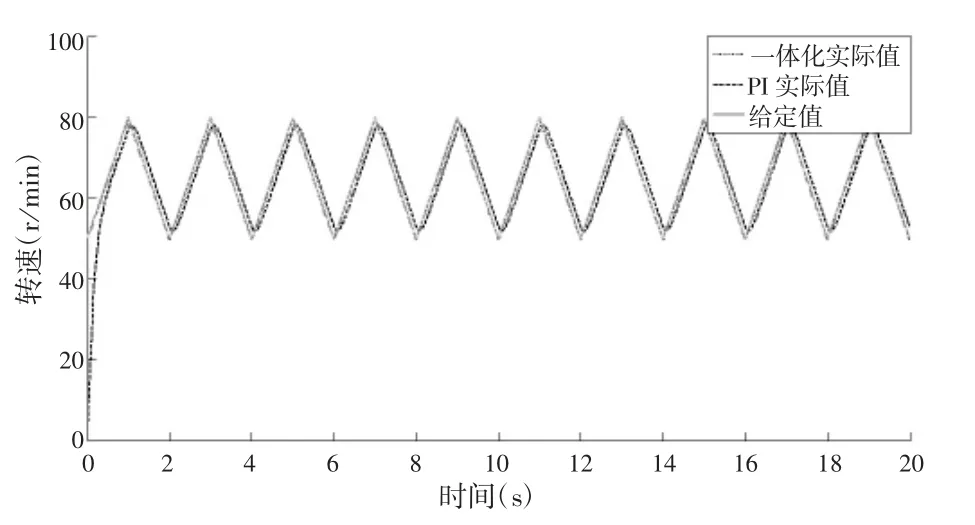
图7 速度三角波对比波形
如图7可见,采用PID控制时,三角波的速度跟踪时间滞后0.1s,跟踪的稳态误差为±2,采用一体化控制方法时,速度跟踪性能良好,无滞后跟踪时间,跟踪的稳态误差为±0.3。
在速度给定时,初始张力F23给定幅度为20、频率为1rad/sec的正弦波信号,仿真结果如图8所示。
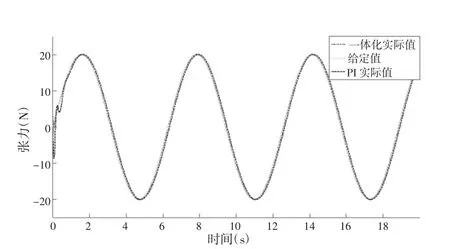
图8 张力正弦波对比波形
如图8可见,采用PID控制时,正弦波信号的张力跟踪响应时间为0.9s,跟踪存在滞后,跟踪的稳态误差ess为3.75%,采用一体化控制方法时,速度跟踪性能良好,张力跟踪响应时间为0.3s,几乎无滞后跟踪时间。可见基于一体化控制的同步系统具有更快的响应速度,较好的跟踪精度。
5 结论
针对多电机系统具有多输入多输出、强耦合、时变的非线性系统等特点,本文提出了一种基于一体化控制的多电机同步协调控制方法,该控制方法通过引入反步提高了系统的快速性和控制精度。通过解耦、跟踪仿真验证,结果表明,本文提出的方法有更快的响应速度,仿真结果验证了基于一体化控制的多电机同步协调控制方法的正确性和有效性。
