基于改进PWM控制的串联型三相混合型整流器的设计
2021-09-24李凯凯魏立明
李凯凯,魏立明
吉林建筑大学 电气与计算机学院,长春 130118
0 引言
电力电子技术在日常生活中应用十分广泛,应用于交直流转换的整流器更是不可缺少.常规整流器电路主要包括不控整流电路与PWM整流电路.不控整流电路主要由二极管及滤波电容组成,其优点是稳定性高,但缺点也很明显,即不可控制且直流侧电压受交流侧电压影响,同时直流侧需要较大的滤波电容,成本较高[1].PWM整流电路由IGBT等可控器件构成,其优点是控制灵活,直流侧电压较为稳定,缺点是器件价格昂贵,控制过程复杂,稳定性稍差[2].因此,有国外学者提出了混合整流的概念,采用不控整流与可控整流并联的方式,由不控整流承担大部分功率,而用PWM整流输出较小功率,并进行电流滤波和功率因数补偿,同时提出了两种并联整流器的拓扑结构,和双控型整流器的功率控制方法[3].国外对于混合整流的研究较为深入,已多方面投入使用,如飞机、汽车及机车等方面.国内研究也有较多成果,如在航空机电作动器[4]方面以及航空电源方面的研究也取得了成就.但是现存的混合型整流器多为并联型,其控制方式较为复杂,且直流侧依旧需要较大的滤波电容才能取得较好的直流波形.此外,输入端降压变压器还增加整流器的体积和重量,对整流器的安装应用带来不便.为此,本文设计了一种串联式混合整流器,结合了不控整流与PWM整流的优点,最终仿真结果表明,本设计可以在保持直流侧电压稳定的前提下,大幅减小直流侧滤波电容的容值.
1 串联型整流器主回路参数设计
1.1 混合整流原理简述
不控整流与PWM整流原理本文不再赘述,具体可参考文献[5]和文献[6].串联式混合整流器原理较为简单,由不控整流器输出大部分功率,由PWM整流进行功率补充.通过测量不控整流器的输出电压进而得到PWM整流器的输出电压指令,再对得到的输出电压指令进行处理,得到PWM整流器的控制信号.由不控整流输出电压与PWM整流器输出电压串联后就可以得到所需的直流电压,即直流侧电压等于不控整流输出电压与PWM整流器输出电压之和.
1.2 主参数计算
取不控整流交流测电流侧相电压有效值为220 V,假设不控整流交流测输入电压为Ua,Ub,Uc,不控整流直流侧输出电压为Uab,Ubc,Uca,则由不控整流的工作原理可以得到以下计算结果.
假设输入端电压分别为Ua,Ub,Uc,即:
(1)
(2)
(3)
则输出端未经过滤波的电压为:

(4)

(5)

(6)
在三相不控整流器中,每个桥臂导通120°,每个二极管导通60°,因此由Uab,Ubc,Uca可以得到不控整流输出的电压范围在465 V~537 V之间,所缺电压由PWM整流器输出.由于本设计的直流测电压要求为750 V,因此PWM整流器直流测电压范围在213 V~295 V之间.PWM整流器具有升压特性,其直流侧输出电压大于交流测输入电压,因此设定PWM整流器交流测输入电压有效值为130 V.
设定混合整流器总功率为30 kW,直流测电压为750 V,由P=UI可以得到混合整流器的直流侧电流为40 A.二极管承受的最大压降为2倍的输出电压,不控整流器输出的电压范围在465 V~537 V之间,所以二极管承受的最大反向压降为537×2=1 074 V.PWM整流器输出的电压范围为213 V~295 V之间,所以IGBT承受的最大反向压降为295×2=590 V.而直流测的电流在40 A,可以选择耐压大于1 100 V、工作时额定电流在50 A的整流二极管;选择耐压在600 V、工作时额定电流大于40 A的IGBT管组装整流电路.因此,二极管可以选择RHRG5020-RHRG50120,其允许通过的电流为50 A,耐压为1 200 V;IGBT管可以选择GT50J301,其电流为50 A,耐压为600 V.
2 系统控制策略
文献[3]中设计了一款单控型混合整流器,即将不控整流器与PWM整流器并联,其中PWM整流电路可以分担部分有功功率,且其能量可以双向流动、稳定性更高,但是由于采用并联结构,要求不控整流与PWM整流输出同样大的电压值,导致PWM控制十分复杂,同时需要确定合适的功率分配比例,导致电路参数确定容易产生错误.鉴于以上不足,本设计将采用串联结构,具体控制策略采用双闭环控制[7].由于采用的是不控整流与PWM整流的串联结构,因此在得到不控整流的输出电压后,将其与直流侧电压作比较得到电压环的指令信号.此时PWM整流已有输出电压,将其与电压指令信号作比较后进入比例积分谐振调节器.通过比例积分谐振调节器的控制之后,就可达到对电压无误差的控制.此时,将比例积分谐振调节器的输出信号作为电流指令,将电流指令与三个相位各差120°的正弦量相乘就可以得到三相电流的指令信号.将三相电流指令信号分别与PWM整流器交流侧的电流反馈相比较,将比较所得信号输入到比例谐振控制器中,即完成了对电流的闭环控制.将比例谐振调节器的输出信号与三角波相比较,得到PWM整流器的控制信号.整体控制流程如图1所示.本设计中将会使用到比例积分谐振调节器和准比例谐振调节器.
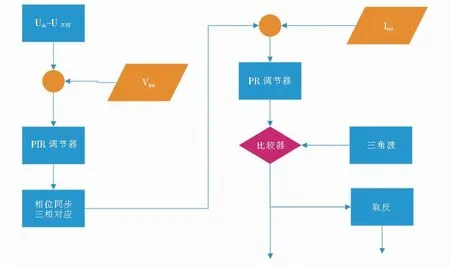
图1 控制策略流程Fig.2 Control strategy flow chart
2.1 准比例谐振调节器(准PR调节器)
准PR调节器传递函数为:

(7)
式中,wc为截止频率,Hz;wo为谐振频率,Hz;Kp为比例系数;Kr为谐振系数.
与比例谐振控制器相比,准比例谐振器增加了传递函数的截止频率,使谐振频率附近的带宽明显增加,并且对频率波动表现出良好的抗干扰性.根据该设计,通过设置适当的截止频率以放大准比例谐振器的带宽,不仅不会降低对信号频率变化的灵敏度,而且还可以提高系统的稳定性,保持高增益特性[8-9].
2.2 比例积分谐振调节器(PIR调节器)
PIR调节器传递函数为:

(8)
式中,Kp为比例调节增益;K1为积分调节增益;Kr为谐振系数;wh为谐振频率,Hz;wc为截止频率,Hz.
PI调节器能够完成对直流输入量的无静差跟踪,其优势是可靠性高和鲁棒性强,但无法对正弦输入量实现无静差跟踪[10].为提高整流器的电流控制性能以及抑制畸变电压,本文将使用PIR调节器用于控制正弦输入电压.
3 仿真验证
由于受资金及所需元器件的限制,本设计未能搭建实际电路,采用仿真软件验证设计方案及控制策略的可行性.仿真电路总体由5个部分组成,分别是电源部分、不控整流器部分、PWM整部分、RC部分以及PWM控制电路部分.仿真电路如图2所示.
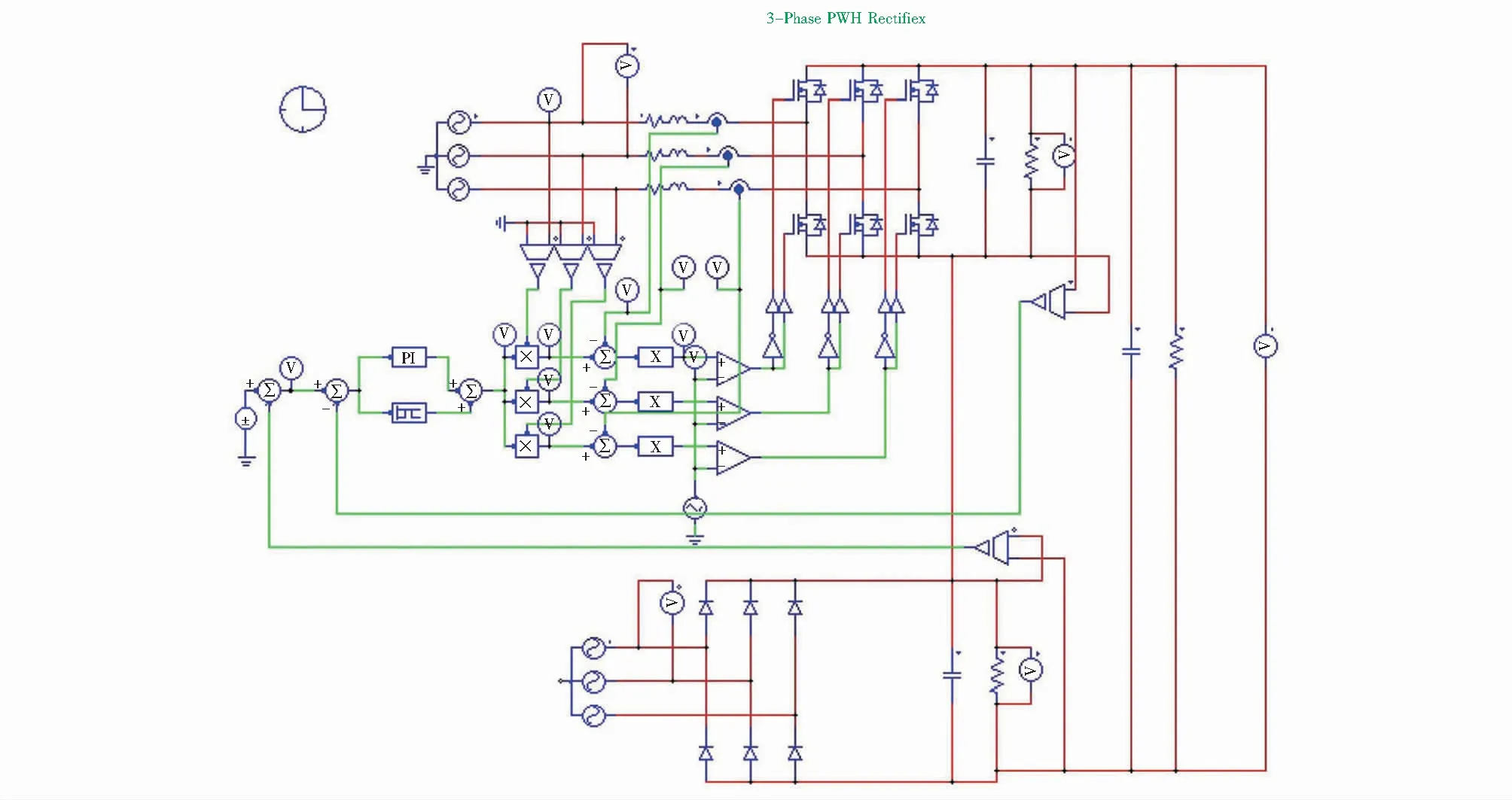
图2 仿真电路图Fig.2 Simulation circuit diagram
由图2可知,电路中包含两组电源分别为不控整流器和PWM整流器供电,不控整流器和PWM整流器后各并联一个极小的电容和电阻,避免在电压测量过程中受到影响而导致测量出错,得不到正确的电压指令信号.其中绿色线连接的是控制电路,按照图1所示控制策略框图进行连接,红色线连接的是主电路,包括电源、不控整流器、PWM整流器和电感电容电阻等主电路元件.
在仿真时,先按照直流侧带电容的电路进行仿真,然后去除电容再做一次仿真,对比结果分析电容对直流侧输出电压的影响,同时看不同电容的影响.首先保持开关频率为10 kHz,直流测滤波电容为2 mF,得到直流侧输出电压(V1)、不控整流输出电压(V3)和PWM整流输出电压(V2)的波形(如图3所示),以及PWM整流单个桥臂上下管的控制波形(如图4所示).然后更改直流侧滤波电容为0.2 mF和20 mF,并分别得到其波形,如图 5,图6所示.最后去除直流侧滤波电容,得到仿真结果如图7所示.
通过对图3分析可得到,任一时刻直流侧电压(V1)=不控整流输出电压(V3)+PWM整流输出电压(V2),与串联型整流器的理论相符合.并且直流侧电压的误差较小,波形波动不大,采用PSIM中的测量工具可以得到直流测电压最大值为759 V,最小值为753 V.对比设计目的直流侧电压应为750 V,因此可计算得到直流测电压的最大误差为1.2 %,误差较小,在可接受范围内.
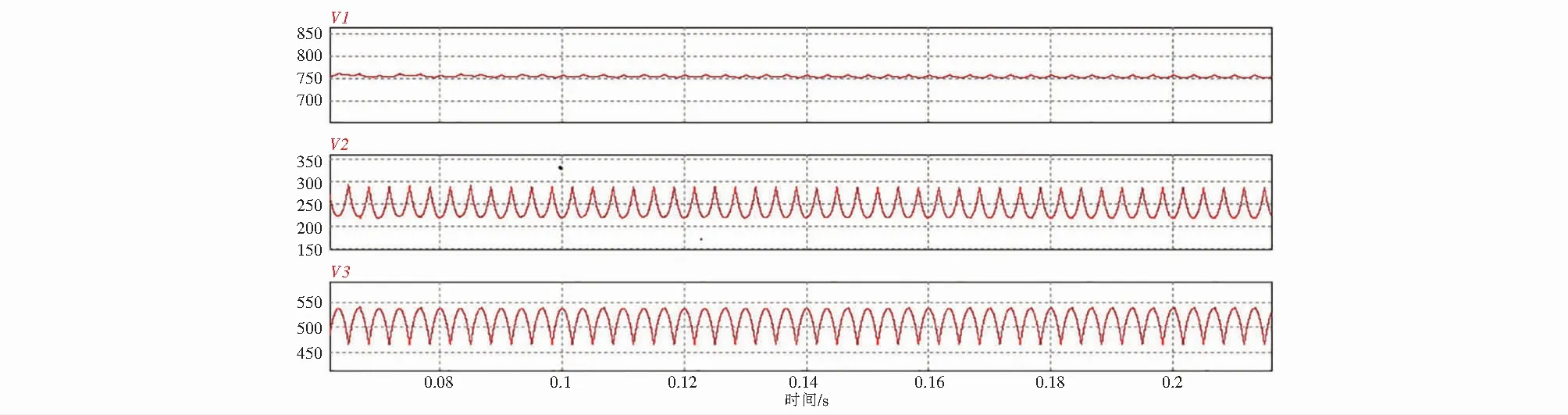
图3 电容为2 mF时输出电压Fig.3 The output voltage at the capacitance of 2 mF
图4为PWM整流器一个桥臂上下两个IGBT管的控制信号波形,由图4可以看出,两个控制信号相反,说明同一桥臂的两个IGBT管不会同时导通,整流器工作正常.
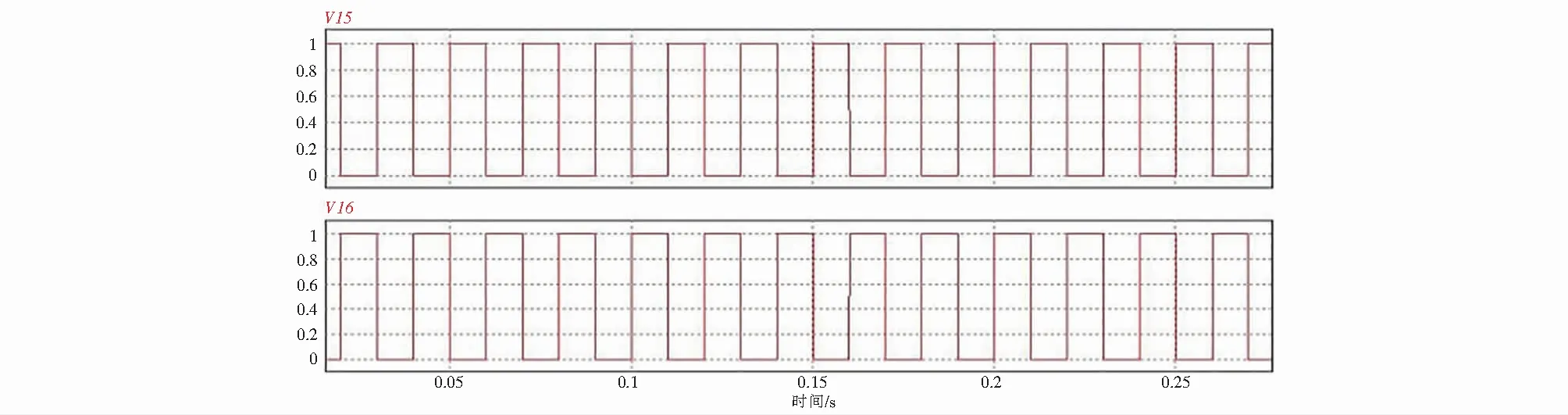
图4 PWM整流器控制信号波形Fig.4 PWM rectifier controls the signal waveform
通过分析图5可知,当直流侧滤波电容减小为0.2 mF时,直流侧电压(V1)、PWM整流输出电(V2)、不控整流输出电压(V3)依旧满足直流侧电压(V1)=不控整流输出电压(V3)+PWM整流输出电压(V2),但是直流侧电压的最大值变为792 V,最大误差为5.6 %,误差比电容为2 mF时增大了许多.而且不控整流输出电压V3也受到影响,不再是光滑的六脉波,可能是电容的变化导致电流改变影响了不控整流输出电压的测量.
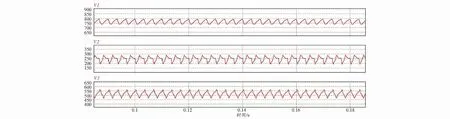
图5 电容为0.2 mF时的输出电压Fig.5 The output voltage at the capacitance of 0.2 mF
通过分析图6可知,当直流侧滤波电容增大为20 mF时,直流侧电压(V1)、PWM整流输出电(V2)、不控整流输出电压(V3)依旧满足直流侧电压(V1)=不控整流输出电压(V3)+PWM整流输出电压(V2),但是电容过大,严重影响了系统的性能,直流侧电压初始极大,但之后的电压较为平稳,近似保持750 V不变.
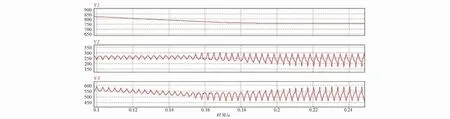
图6 电容为20 mF时的输出电压Fig.6 The output voltage at the capacitance of 20 mF
通过对比分析图3,图5和图6可以得出,电容无论过大还是过小,都会对电路的性能造成较大影响,只有选择合适的电容容值,才能保证系统的合理运行,保持电压的稳定,使电压误差尽可能减小维持在可接受的范围内.
最后去除直流侧的滤波电容,观察直流侧输出电压的变化,如图7所示.去除滤波电容后,直流电压的波动很大,误差也很大.同时,PWM整流器的输出电压波形也不如有电容时的波形效果好.经过测试发现电容最小为0.5 mF.如果电容容值小于0.5 mF时,直流侧输出电压的波动较大.
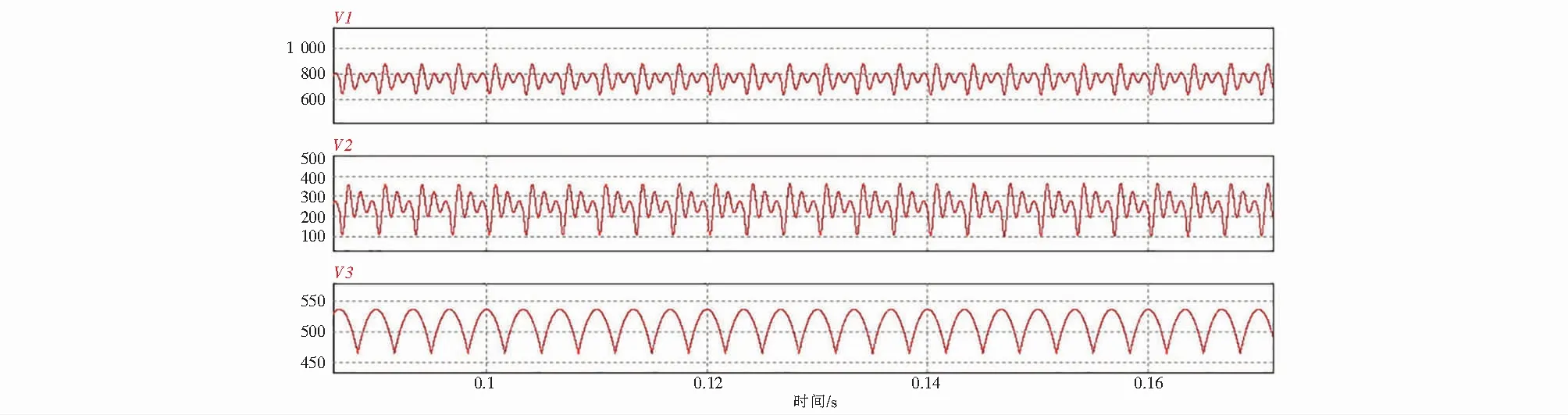
图7 不加电容时的输出电压Fig.7 The output voltage without capacitance
通过对比图3和图7发现,去除滤波电容时,直流侧输出电压的谐波较多,电压波动较大,必须选取合理的滤波电容容值,减少谐波的影响;由总输出电压、不控整流输出电压及PWM整流器的输出电压仿真结果可以得到,每一时刻的总输出电压等于不控整流器输出电压与PWM整流器输出电压之和,这说明控制过程中实现了无差跟踪;直流侧的滤波电容很小,与不控整流相比较,本设计的串联型混合整流器直流侧的滤波电容较小,能够节省成本;直流侧输出电压较为稳定,在仿真验证过程中可以看到,滤波电容合适时,直流侧电压稳定在750 V上下,电压的波动幅度在1 %左右,在可接受范围之内.
4 结论
本文主要针对三相混合型整流器进行设计,提出了一种基于改进PWM控制的串联型混合整流器,并在PSIM中进行了仿真验证.仿真结果表明,采用双闭环控制方式的PWM整流器控制环节较为简单,串联结构比并联式混合整流器更易控制,且所需的直流侧滤波电容容值大幅减小.