双盘拉丝机自动换盘装置的设计
2021-09-23顾广凯
顾广凯



摘 要:双盘拉丝机是一种用于金属制品拉丝工作的设备。目前,双盘拉丝机主要应用于铝丝、铜丝及钢丝的拉拔中,这种拉丝机有着高效、高速等显著的优势。这种双盘拉丝机在欧美等一些较为发达的国家已经得到了具体应用。本文在UG仿真环境下对双盘拉丝機运动轨迹进行动力学仿真和合理化设计,通过运动函数形式给出运动副的运动参数,反复修改模拟仿真参数,使得拉丝机准确地完成上盘-排线拉丝-托举-下盘的工作过程。
关键词:双盘拉丝机;自动换盘装置;动力学仿真
1 仿真方案的建立
笔者利用UG进行动力学仿真分析,根据设计模型特点,该机构运动分析需要设置9个运动体,命名为B001~B009。在进行动力学分析过程中,通常需要考虑运动体的质量属性。因此,在创建运动体时,要视情况来定义运动体质量属性。此处选择系统默认指派的材料、惯性、质量等属性来定义运动体。
1.1 运动副定义
运动副又分为固定运动副(限制机构运动)和无固定运动副(允许运动的机构)。通过机构工作原理添加定义运动副,运动副定义如表1所示。
1.2 运动驱动添加
1.2.1 运动驱动的选择
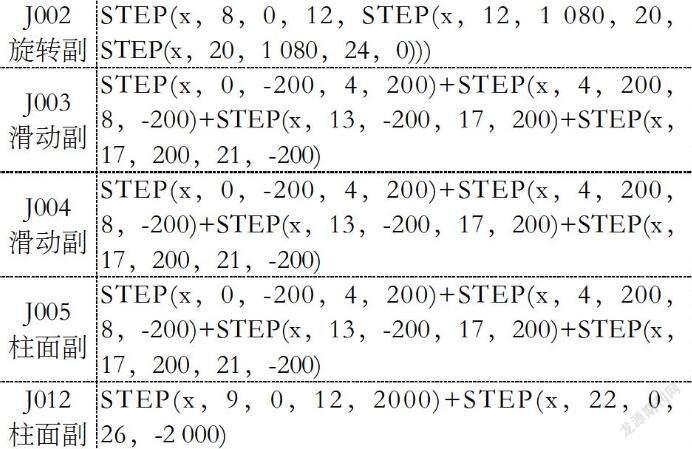
运动驱动指添加在运动副上控制机构运动的运动参数,根据双盘拉丝机在实际工作时的运动规律、时间差及完成动作的顺序。选择运动函数中的STEP函数作为本文仿真中运动副的运动驱动。STEP(x、x0、h0、x1、h1)是阶梯(STEPFunction)函数,其定义如下:
h0,x≤x0;x0 式中:x—时间自变量,s;x0—函数初始时刻x的值,s;h0—初始位移,mm;x1—位函数终止后x的值,s;h1—函数终止位移,mm。 1.2.2 运动函数STEP驱动的设置 为了保证拉丝机更准确的实现上盘-排线拉丝-托举-下盘的工作过程,笔者应用STEP运动函数的函数类型做出运动副的函数驱动形式,经反复实验修改后,做出各运动副的运动仿真数据。 运动服驱动阶梯函数如表2所示。 鉴于双盘拉丝机的结构较为复杂,考虑到仿真的简便,笔者在UG仿真过程中作如下假设:(1)个别运动副内的摩擦力忽略不计;(2)各运动副之间均为刚性连接,内部间隙不计。 2 仿真及结果分析 2.1 解算方案建立 在创建完运动体、定义完正确的运动副之后,笔者在指定的首先开始运动的运动副上施加运动驱动,然后单击“解算方案”,解算类型设置为“常规驱动”,分析类型为“运动学/动力学”;仿真时间为30 s,步数为1 500(为了使仿真分析更合理,通常把仿真时间和步数与运动件走过的位移设置为具有一定的比例关系),重力方向竖直向下,点击“确定”开始求解;通过动力学仿真分析,可以分析机构的位移、速度、加速度等运动特征。 在进行仿真时,双盘拉丝机各运动件在STEP运动阶梯函数控制下完成换盘动作。 2.2 位移、速度、加速度仿真结果分析 在UG完成解算后,查看运动仿真动画效果。结果表明,整个机构能够实现顺利运转;通过运动导航器窗口分别选择运动对象J001、J003、J018为主要分析对象,然后选择在Excel电子表格显示结果,这样就可以得到双盘拉丝机的位移(displacement)、速度(velocity)、加速度(acceleration)与时间的对应关系曲线图。 3 结语 仿真结果表明,自动换盘装置设计方案基本合理,符合实际工作要求。该结果可对进一步提升拉丝速度、换盘时间及优化双盘拉丝机结构提供依据。 参考文献: [1]刘行之.PLC的直进式拉丝机变频改造控制系统研究[J].冶金管理,2021(1):46-47. [2]吴云平.拉丝机组多牵伸生产线.浙江省,浙江聚宝尼龙科技有限公司,2019-01-13. [3]刘竑柱.直进式拉丝机中的齿轮减速机应用策略[J].中国战略新兴产业,2018(24):135+137.
