基于STM32F03RCT6的无人机自主巡
2021-09-23马浩然王博
马浩然 王博
【摘要】 本系统设计制作了四旋翼自主巡线无人机。该系统包括STM32F103RCT6开发板为控制核心即飞行控制模块、OPENMV视觉循迹模块和超声波模块。OPENMV视觉循迹模块负责采集并处理图片,将处理好的路径信息传输给控制核心,超声波模块负责测量无人机离地高度,并传输给主控,各测量模块与飞行控制模块通过串口保持实时通信,飞行控制模块根据反馈的实时信息,控制电机完成自主巡线飞行。[1]。
【关键词】 无人机信息通讯 四旋翼自主飞行器 STM32单片机 摄像头循迹
引言:
在科学技术快速发展的今天,无人机是一种通过由无线控制或机身自控系统操纵的无人飞行器。[2]因此提高无人机巡线的技术水平,解决无人机巡线的安全问题,是现代无人机研究须重点解决的问题。[3]
一、系统结构
本系统由飞行控制模块、视觉巡线模块、超声波模块、电调及电机模块、导航及惯导模块组成,外部结构由机架、电调、电机、及各种核模块构成。机架为刚性X结构,各模块均安装在机架中心区域,电调附着在机架机臂上,电机在四个机臂末端。
飞行控制模块采用STM32F103RCT6芯片,主要负责通过电调控制四个电机,进而控制飞机的飞行姿态;导航模块以独立封装IMU,MPU6050、IST8310、SPL06-001构成,该模块负责收集无人机的三维立体数据经过处理得出飞行状态,发送给飞行控制模块调整飞行姿态;电源模块负责为整个系统提供持续稳定能源。
二、系统硬件与设计
该系统的硬件主要包括智能集散点和四旋翼端的硬件设计。
2.1四旋翼端的驱动模块方案
2.1.1 2213/13T1000KV无刷直流电动机
本系统采用的是2213/13T1000KV无刷直流电动机。相较于有刷电机,无刷电机摩擦小,损耗小,运转流畅,寿命长,能提供较高的转速和较强扭力,并且具有调速范围大、效率高和稳态误差小等优点。[4]
2.1.2 脉冲宽度调制PWM调速
脉冲宽度调制是一种模拟控制方式,根据本设计中受控电机的容量和无刷直流电机调速模式,本设计采用了PWM变换器进行调速。[5]
2.2飞行控制模块设计
自行设计了以STM32F103RCT6(图1左)为主控的独立封装IMU(图1右)的飞控,其优点是硬件电路设计相对简单,网上飞控开源资料多,也较为成熟。
2.3摄像头模块的论证与选择
无人机寻迹的关键在于摄像头采集处理信息的好坏,若图片出现失真模糊重影,将直接影响下一步飞行姿态的调整。
本设计采用摄像头是OpenMV摄像头,OpenMV是一个开源代码的装载OV7725摄像头以STM32F427CPU为核心芯片功能强大的机器视觉模块。[6]该摄像头满足后续处理和寻迹识别的要求。
三、系统电路与程序设计
3.1电路设计
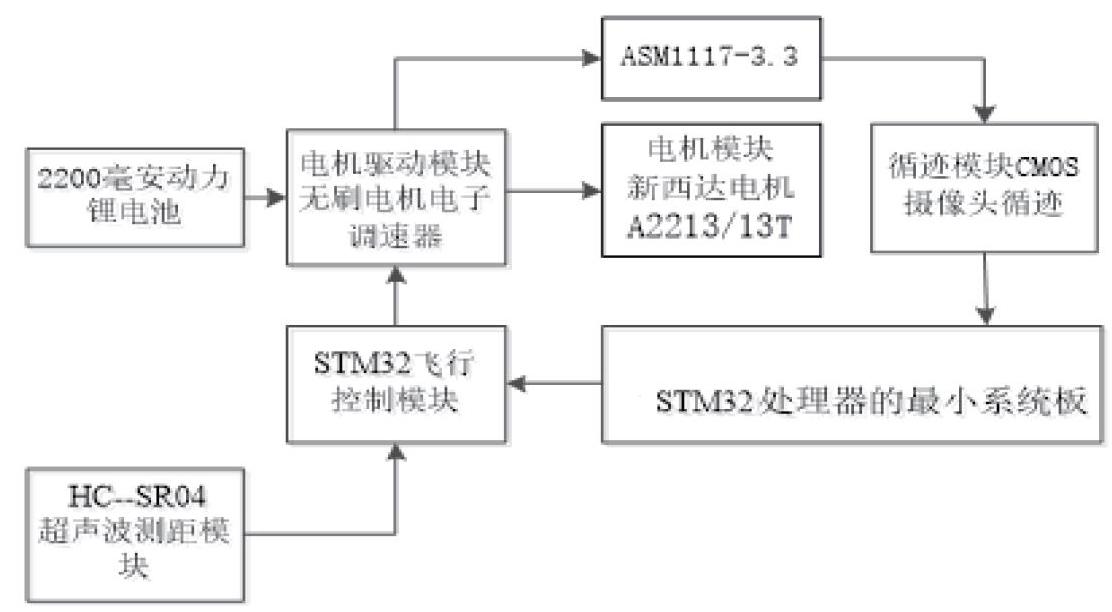
系統包括STM32处理器的最小系统板为核心的飞控、超声波测距模块、OpenMV摄像头模块和电机驱动模块,其中超声波测距模块和OpenMV摄像头模块需要外接在STM32处理器上与核心实时传输数据,系统总体工作框图如图2所示。
3.2程序设计
在前期进行方案确定后,针对题目要求,最终写出合适算法,进行控制。程序流程图如下:
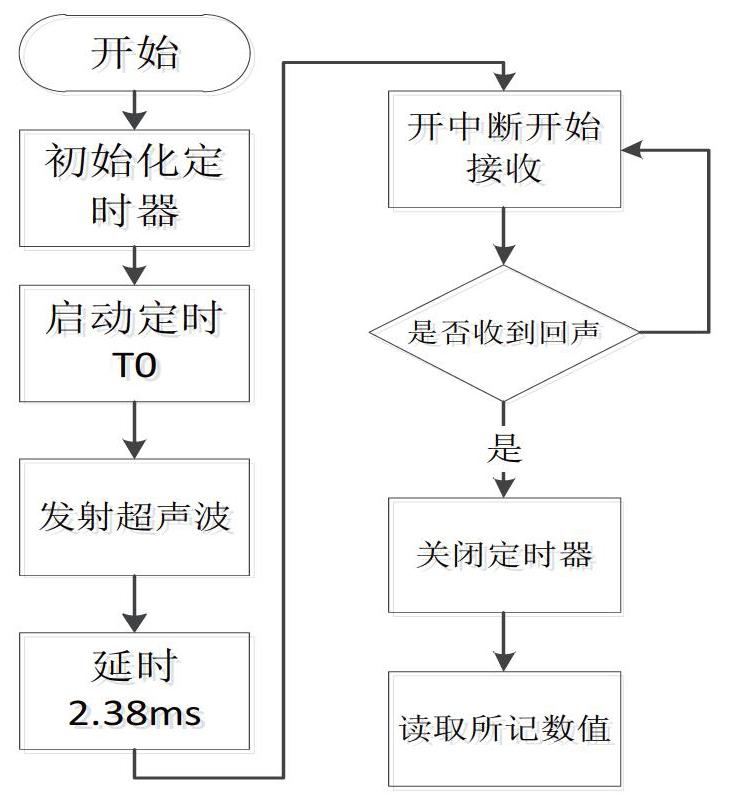
3.2.1超声波模块子程序流程图
超声波模块子程序如图3所示。通过往返超声波的时间,来计算离地高度。
3.2.2摄像头模块程序流程图
摄像头模块程序是寻迹算法的核心,摄像头模块的程序流程如图4所示。
四、结束语
该无人机系统采用OpenMV摄像头模块,以STM32F103RCT6芯片为控制核心,在巡线算法上采用图像二值化的方法处理计算路径信息,能够平稳的完成自主巡线的功能。
参 考 文 献
[1]张捷.电力巡线无人机实时避障方法研究[J].科技风,2021(08):195-196.
[2]余鹏,田杰,刘铁军,郗小鹏.电动多旋翼无人机在高压电路协同巡线中的应用[J].自动化技术与应用,2021,40(02):34-37+54.
[3]丁多斌,冯向萍,丁燕,孙元明.基于STM32四轴无人机自主巡线设计[J].电子设计程,2021,29(02):142-145.
[4]杨忠炯,王卉,董栋.无人机输电线路巡线系统及应用研究[J].电子设计工程,2017,25(04):162-166.
[5]付昱玮,李字明,姜洪.无人机巡线的发展和应用研究[J].黑龙江科技信息,2014(03):25-27.
[6]汤明文,戴礼豪,林朝辉,王芳东,宋福根.无人机在电力线路巡视中的应用[J].中国电力,2013,46(03):35-38.
