基于动态核主元分析的大功率LED阵列动态光源在线状态观测与故障诊断
2021-09-23饶欢乐李纪宾钱依凡洪哲扬
王 晨,饶欢乐,李纪宾,钱依凡,洪哲扬
(杭州电子科技大学 自动化学院,浙江 杭州 310018)
引言
大功率LED 作为一种新型的人工光源,由于其亮度高、寿命长、可控性好、节能环保等优良特性,使其在照明领域占据了重要的地位[1]。而大功率LED 阵列光源是由多个不同类型的LED 单体所组成的一个极为复杂的系统,具有高度非线性、温度敏感性、明显的老化特性[2],这些特性使得大功率LED 阵列光源的非线性参数测量与控制都面临着巨大的挑战,并且大功率LED 阵列光源的光学性能会随着长时间工作而产生退化[3]。因此,及时、准确监测大功率LED 阵列光源内部光电热参数变化,对产生的故障进行诊断与定位,这对保障和提高大功率LED 阵列光源安全性、可靠性以及持久高效性都具有重要的理论和应用价值。
大功率LED 阵列光源工作涉及多个物理过程,边界条件模糊,存在未知有界干扰且变量众多[4]。数据驱动方法是可以直接从过程的历史数据与测量系统实时的测量数据中提取出故障的模式。多变量统计过程监测(MSPM)的方法是基于隐式结构映射的过程监测与故障诊断的主要方案,主要有主元分析(PCA)、规范变量分析(CVA)、偏最小二乘(PLS)、独立成分分析(ICA)等[5-7]。将主成分分析(PCA)的方法应用到大功率LED 阵列光源监测数据的处理中,工作过程中的传感器收集到的动态数据,其通过非线性关系相互关联相互耦合,传统的PCA 仅在稳态线性过程中表现良好[8]。为了处理非线性,已经提出了例如神经网络PCA 和核PCA(KPCA)[9-10]的方法。此方法可以分离从传感器非线性测量信号获得的正常和异常数据。因此它可以识别LED 工作过程处于正常还是异常状态。KPCA 作为静态方法,很难获得数据的序列相关性[11],若不考虑观测数据的序列相关性,将导致部分故障无法显现。因此,在开发监测模型时应考虑动态特性[12]。动态主元分析方法(DPCA)在一定程度上能消除数据的自相关性,提高诊断精度,减少误警率[13]。Ku 等开发了动态核主元分析(DKPCA),在应用中为了考虑时间相关性,在应用KPCA 之前对数据矩阵进行了时间滞后的扩展[14]。本研究将动态核主元分析方法应用到大功率LED 系统的状态监测中,利用多个传感器对大功率LED 阵列的关键工作数据进行采集,运用T2与SPE 统计特征实现故障检测,重构贡献图方法实现故障的分离。
1 问题描述
本文对大功率LED 阵列在非线性闭环控制作用下的稳态工作过程进行了研究。图1 为多个LED 所组成的阵列的PET 关系原理图。LED 工作过程包含电致发光和热耗散2 个过程即所激励的电能转化为光能和热能。LED 的发光发热是一个多物理场耦合的过程,诸如光通量、发光效率和光谱之类的光学参数,LED 的功率、电流和电压之类的电学参数以及LED 结温、热沉温度和热阻之类的热学参数紧密相连,其中一个物理场中参数的改变会引起其他物理场参数的变化。通过分析LED 工作中光场、电场和热场之间的相互影响,Hui 提出了光电热(PET)的数值计算模型来描述三者之间的相互耦合关系[15]。在大功率LED 阵列实际工作过程中,伴随着未知的环境光的扰动,传感器和LED 不确定地老化与结温升高导致的失效,会引起系统的故障。
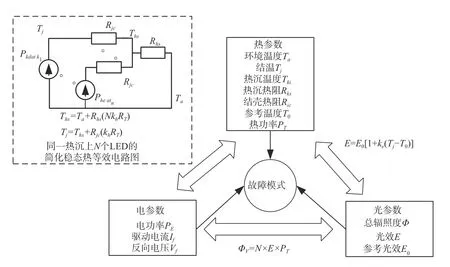
图1 PET 原理图Fig.1 Schematic diagram of PET
2 基于DKPCA 的大功率LED 状态在线监测与故障诊断算法
采集大功率LED 阵列正常稳态工作传感器数据作为训练数据,采样次数为N1(N1≫1),单次测量数据整理为向量d=[Ths,Ta,If,Vf,ϕ,δI,δT]T,可以得到原始数据矩阵,将时滞向量代替原始数据向量,那么就需要处理原始数据的增广矩阵,这样核主元分析就被拓展到它的动态表示,即动态核主元分析。通过平行分析确定时滞阶数s的大小,那么原始数据矩阵的增广矩阵为
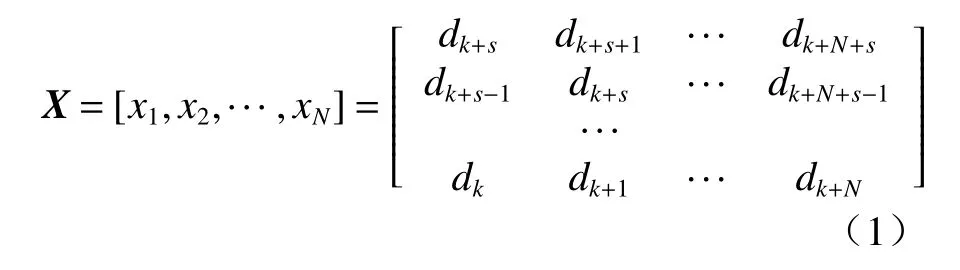
式中:k+N+s<N1,DKPCA 基本思想是将数据集X,通过非线性映射X-φ-F映射到高维线性特征空间。图2 给出了基于DKPCA 进行离线和在线监控的算法流程图。
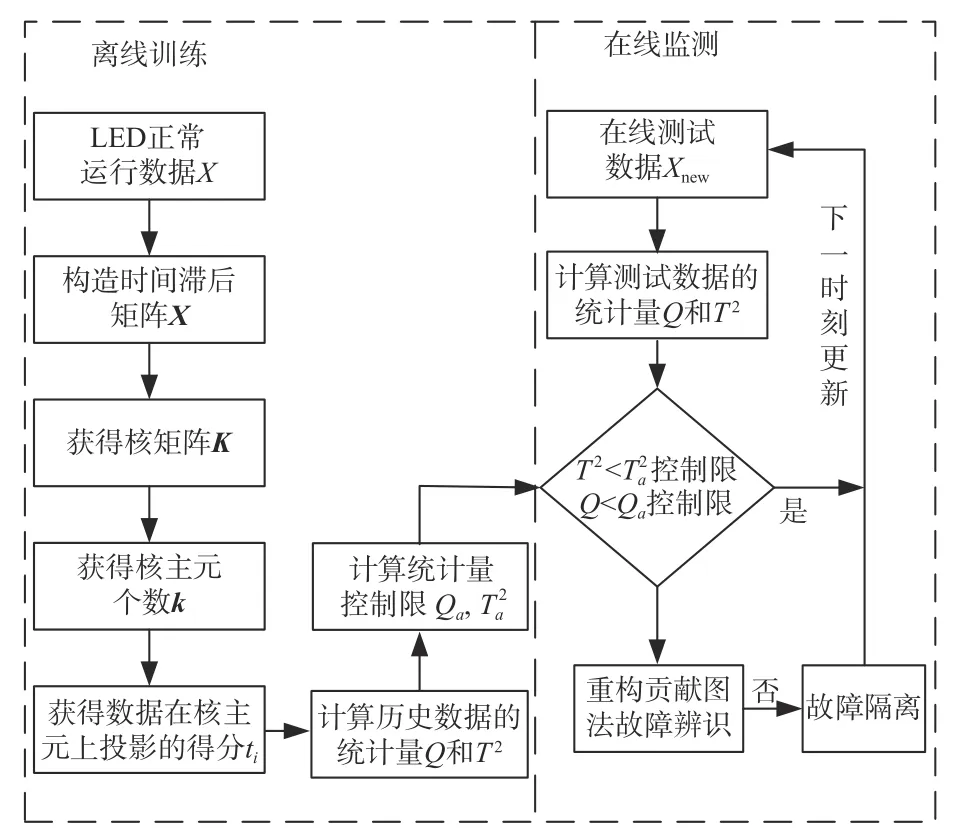
图2 基于DKPCA 的大功率LED 在监测与故障诊断方法流程图Fig.2 Flow chart of on-line monitoring and fault diagnosis method of high-power LED based on DKPCA
当利用主元分析方法对线性系统进行监测时,贡献图方法是进行故障分离的有效手段。然而对于大功率LED阵列动态光源这类典型的非线性系统,利用核主元分析方法进行故障检测后,无法利用贡献图方法进行故障有效分离。ALCALA 和QIN 提出了重构贡献图的方法,解决了利用非线性主元分析方法对非线性系统故障分离困难的问题[16]。重构贡献图定义了沿着一个变量方向的故障检测统计量重构值作为这个变量对故障的贡献,因此具有最大重构值的变量最有可能是对故障贡献最大的变量。重构贡献图的目标就是确定一个故障方向上故障幅值的大小,使重构后测量数据的故障检测统计量达到最小。
3 性能测试与验证
3.1 仿真实验
图3 为大功率LED 阵列光源测量实验装置图。输入量为参考照度,底层控制器根据输入的目标光照度值来控制电源和制冷片,对大功率LED阵列进行恒流驱动,测量传感器包含电流传感器、电压传感器、光敏二极管和热电偶,它们的输出分别是If、Vf、ϕ、Ths、Ta。执行器包含电源和制冷片,分别表示为δI、δT,在实验中,使LED 按照设定操作点工作,采样数据通过测控板传到上位机软件。采样周期T= 0.01 s,前tm正常状态下采集到的光电热数据(驱动电流If,光照度 ϕ,热沉参考温度Ths)作为训练数据,tm后系统所采集到的数据作为测试数据,在tk>tm时在测量数据上注入故障信号,系统初始状态和目标状态一致,这样使LED 处于稳态工作状态。基于上面所描述的实验平台,在发生传感器偏差故障与执行器部分失效故障情况下,对故障诊断算法进行验证,表1 为本次验证的故障类型描述。
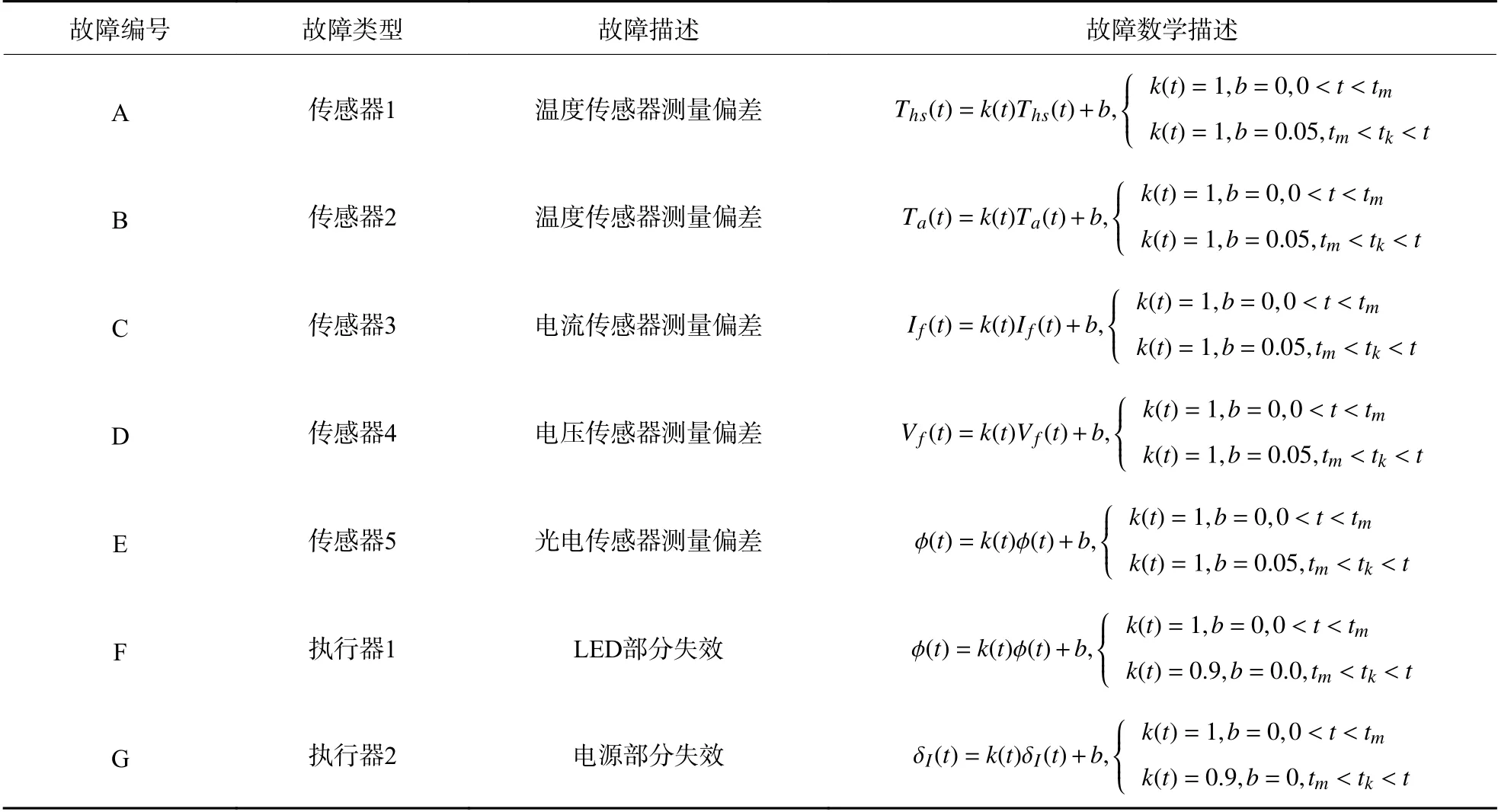
表1 典型故障描述Table 1 Description of typical faults
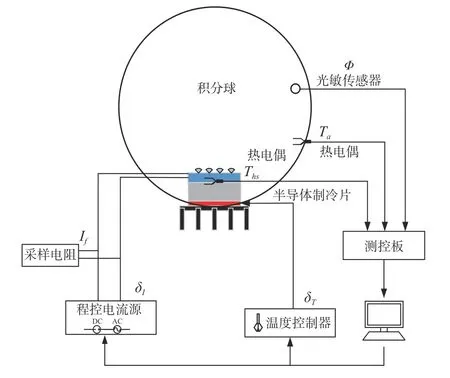
图3 大功率LED 阵列测量实验装置图Fig.3 Diagram of experimental device for high-power LED array measurement
3.2 实验结果分析
本研究对传感器故障以及执行器故障的检测效果进行说明,故障检测结果如图4所示。对于其中典型的5 种故障模式,由图4~图9 可以看出,在tk点注入相应的故障信号使得故障发生后,T2和SPE 统计量都超过了离线模型所求得的控制限阈值。不管是DPKCA 算法还是KPCA 算法都适用于大功率LED 阵列的性能检测与故障检测,实验结果表明DKPCA 算法对故障的灵敏度更高,误检率更低,是相对于KPCA 算法更优的方法。
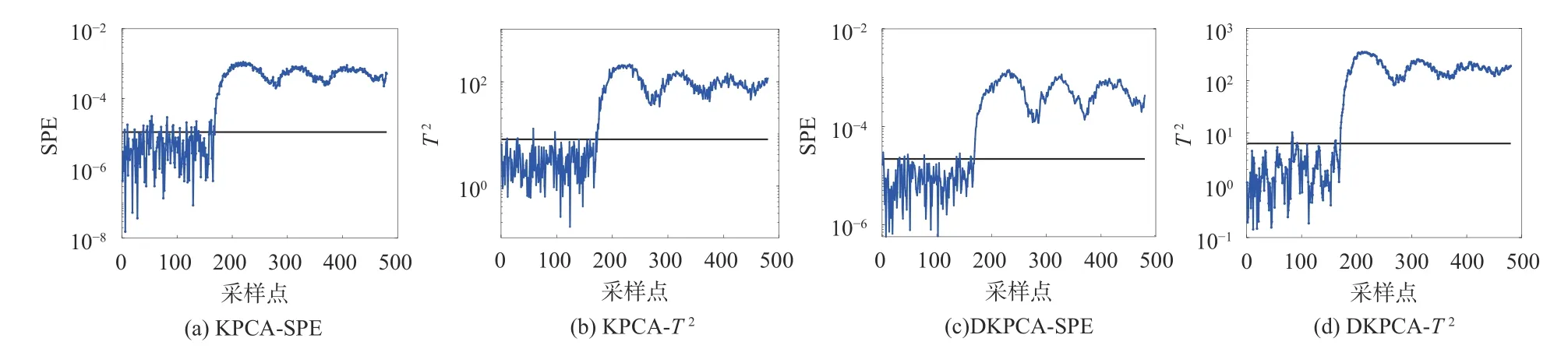
图4 故障A;温度传感器1 故障情况下SPE 和 T2统计量Fig.4 Fault A;statistical magnitude of SPE and T 2 under situation of temperature sensor 1 fault
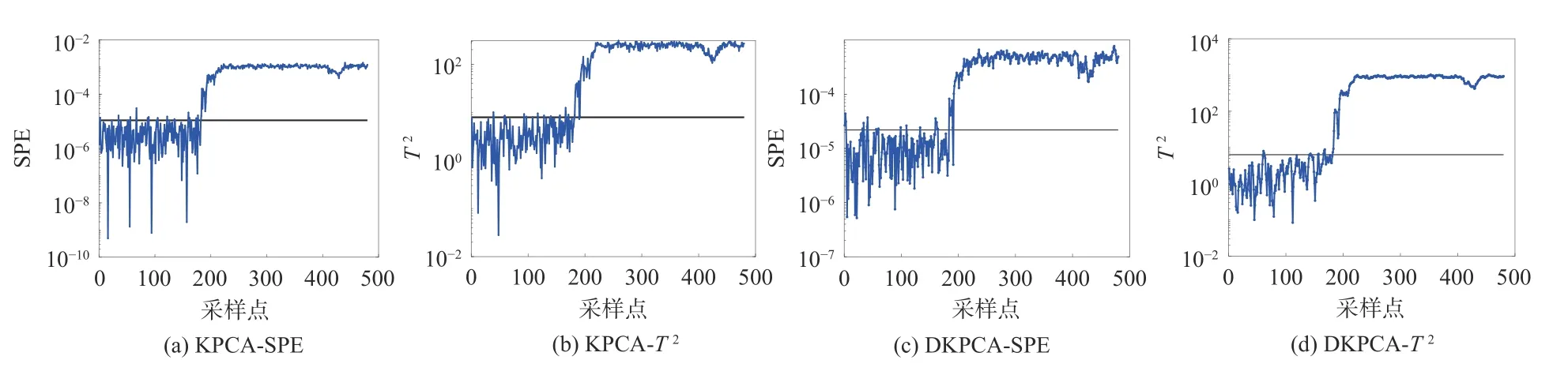
图5 故障C;电流传感器故障情况下SPE 和 T2统计量Fig.5 Fault C;statistical magnitude of SPE and T 2 under situation of current sensor fault
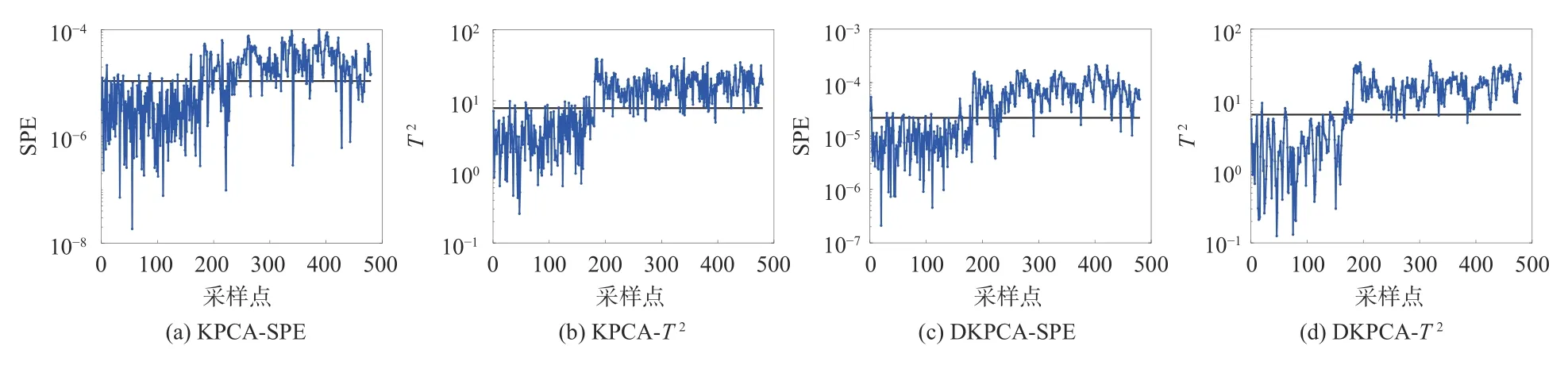
图6 故障D;电压传感器故障情况下SPE 和 T2统计量Fig.6 Fault E;statistical magnitude of SPE and T 2 under situation of voltage sensor fault
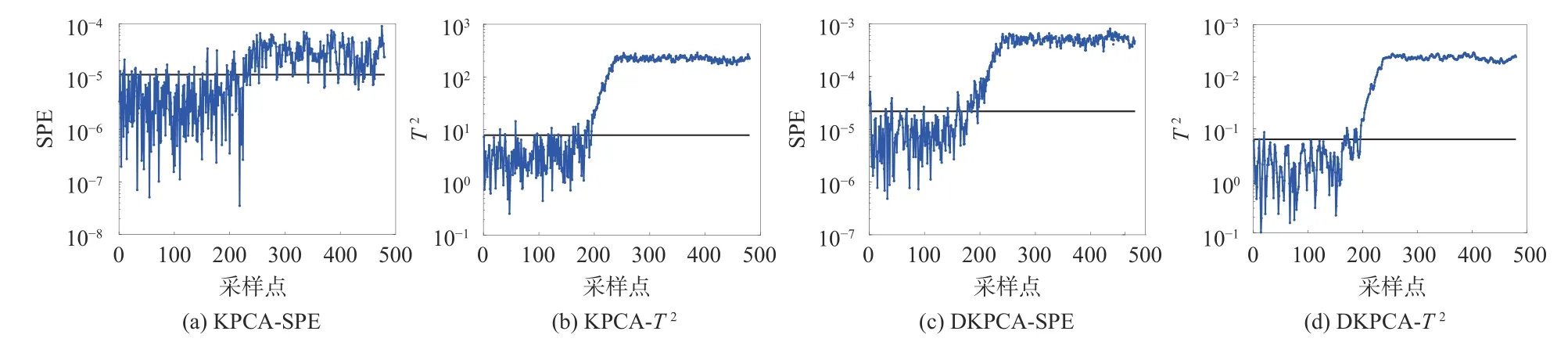
图7 故障E;光电传感器故障情况下SPE 和 T2统计量Fig.7 Fault E;statistical magnitude of SPE and T 2 under situation of photoelectric sensor fault

图8 故障F;LED 部分失效情况下SPE 和 T2统计量Fig.8 Fault F;statistical magnitude of SPE and T 2 under situation of partial LED fault
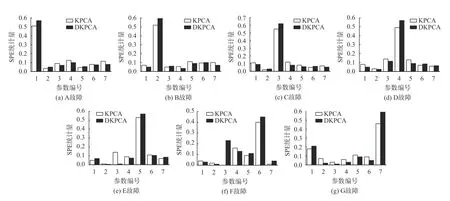
图9 各故障下的故障分离贡献图Fig.9 Contribution of fault separation under each fault
通过表2 可以看出,无论是故障检测率(ADR)还是误检率(FDR),DKPCA 的方法都优于KPCA的方法,并且检测延迟(DD)反映出DKPCA 对故障信号更敏感,第一时间就能监测到故障的发生,而对于KPCA 方法因未考虑到变量的相关性因素,其性能表现相对于DKPCA 方法欠佳。重构贡献图的方法对于故障A、B、C、D 以及E 故障都能够准确地分离出故障变量,而针对故障F 与故障G,本文的方法所达到的故障分离的效果欠佳,有待后续的优化。
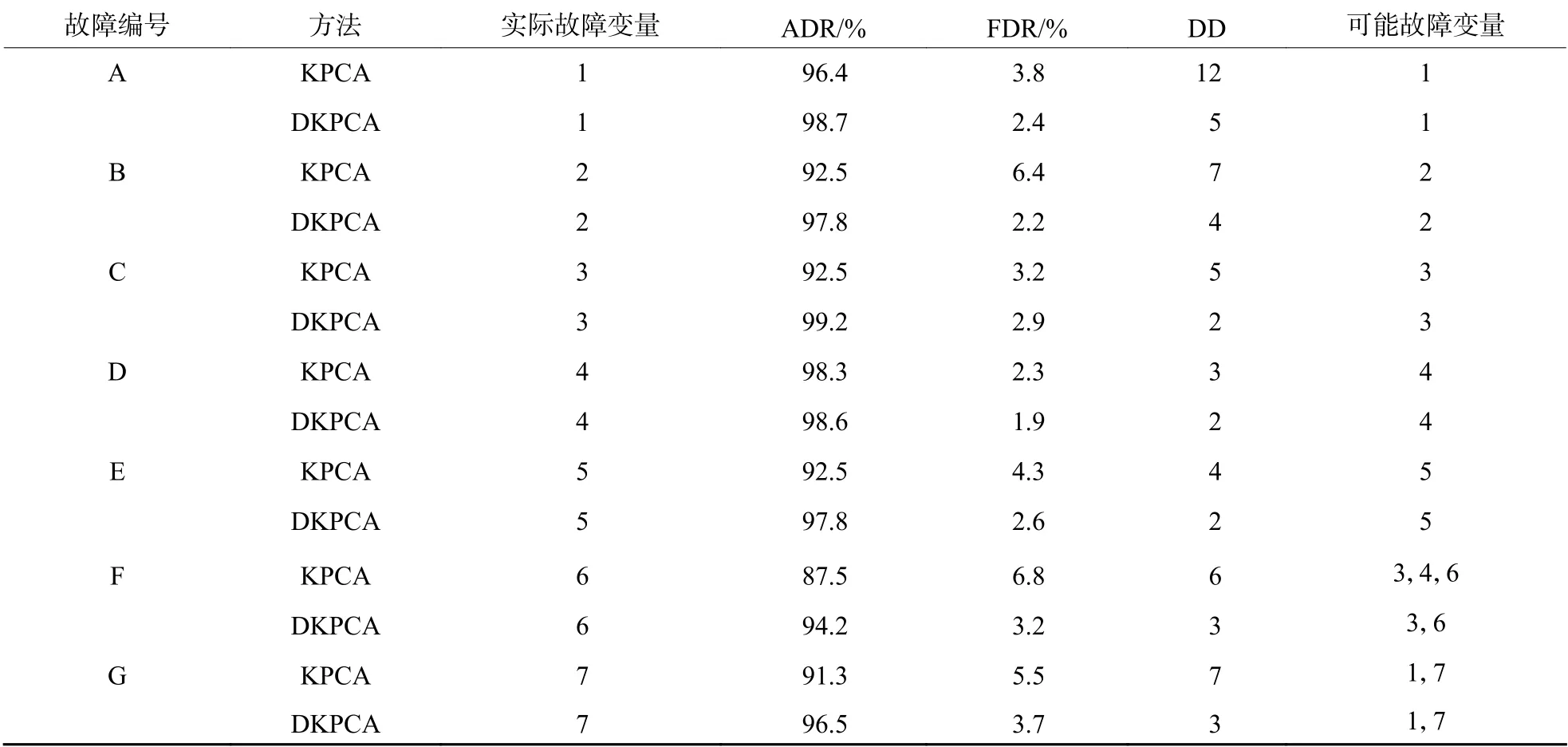
表2 使用KPCA 和PCA 进行的所有实验的性能指标Table 2 Performance indexes of all experiments using KPCA and PCA
4 总结
本研究将动态核主元分析方法应用到了太阳光模拟器中的大功率LED阵列动态光源的性能监测与故障诊断中,利用其稳态运行过程中正常工作的历史数据建立核主元模型,通过T2和SPE 两种统计量作为故障评价指标,采用重构贡献图方法进行故障分离,实验结果表明针对常见的故障模式,两种方法都能实现大功率LED 阵列中一些故障检测和故障分离的功能,总体结果表明,DKPCA检测到的故障比KPCA 更早,也更准确,故障分离效果也更好。
