高精度光电跟踪系统中伺服稳定控制算法研究
2021-09-23马经帅刘晓宇丁良华
马经帅,于 洵,刘晓宇,韩 峰,丁良华
(1.西安工业大学 兵器科学与技术学院,陕西 西安 710000;2.西安工业大学 光电工程学院,陕西 西安 710000;3.内蒙古北方重工业集团有限公司 技术中心产品研究院,内蒙古 包头 014000)
引言
机载光电稳定平台一般由光电载荷、陀螺、框架结构、驱动及控制系统等组成,是一种光、机、电高度集成的军用光电设备,用于目标的侦察和跟踪等。“十四五”规划对于军事装备的性能提出了更高的要求,如探测距离、目标跟踪精度和成像质量等,具体到武器光电稳定平台即是平台的视轴稳定精度[1]。提高平台的抗干扰能力,增强鲁棒性,成为提高光电稳定平台稳定精度的关键。提高速度环的带宽、改进速度环的控制算法则是重点突破方向。高精度电机伺服控制的问题主要有以下3 点:摩擦与外力干扰的抑制能力,系统性能受参数变化的影响,系统动态跟踪性能。为此形成3 个主要研究领域:前馈跟踪控制、闭环控制策略和摩擦补偿技术。
传统的伺服控制系统已经不能满足要求,为此科研工作者开始探索在传统PID 控制策略的基础上,对PID 控制技术的算法进行改进,以满足光电稳定平台的性能要求。近年来涌现出多种不同的方法:利用BP 神经网络的自学习能力来实现参数在线自整定和优化的PID 控制器[2],采用高斯型RBF 神经网络对摩擦进行观测和补偿[3],基于神经网络的状态观测器设计陀螺稳定平台控制系统[4]。这些方法设计过程复杂、计算繁琐、成本大、可实现难度高并没有得到推广应用。自从韩京清教授提出自抗扰控制技术[5]以来,在这方面的研究也层出不穷,文献[6]提出基于重复-自抗扰控制技术提高系统的扰动隔离度,文献[7]提出基于模型设计的线性自抗扰控制器提高光电的响应速度和扰动抑制能力。
变结构控制的研究始于20世纪50年代,前苏联学者Emelyanov 等提出了变结构控制概念,随后Utkin 和Itkis 等学者总结并发展了滑模变结构控制理论,奠定了滑模变结构控制的理论基础。在实际控制系统,变结构控制在滑动模态下总伴随着高频抖动,抖动会影响控制精度,我国高为炳院士在变结构控制理论研究中首次提出了趋近律、品质控制、切换模式等新概念,以此消除抖动[8]。滑模变结构控制(sliding mode variable structure control,SMVSC)适用于线性系统和非线性系统的鲁棒控制。本文以两轴四框架光电吊舱为研究对象,对于传统PID 控制技术难以较好地解决超调和快速性之间的矛盾,设计一种能够独立于输出控制、抑制各种干扰的控制器,提高系统的干扰抑制能力,实现对光电稳定平台高精度控制。最后通过仿真实验验证该控制策略的有效性,具有抗干扰能力强、稳定精度高和实现简单等优点。
1 光电稳定平台结构及模型
1.1 光电稳定平台结构分析
机载光电跟踪稳定平台发展至今已经有多种框架结构。两轴两框架是航空侦察平台中较为广泛的一种,技术较为成熟,是将光电传感器等侦察设备置于相互正交的俯仰、方位2 个框架组成的平台上,如图1所示。通过陀螺稳定回路,克服外干扰力矩,达到视轴稳定的目的[9]。因二框架系统仅适用于小负载、中高精度的稳定平台,其跟踪的角度范围有限,无法很好地解决过顶问题,容易造成自锁丢失目标,跟踪只能实现瞄准线的轴线稳定,而不能实现瞄准线绕自身轴系的旋转变化稳定,同时由于飞机姿态摇摆幅度及摇摆方向的随机性,致使光电成像图像曲变,后期处理困难。三框架三轴稳定平台克服了两轴两框架稳定平台系统的缺点,其稳定原理是根据载体摇摆参数和瞄准空间参数计算出跟踪轴角状态参数,驱动跟踪伺服机构实现瞄准线稳定,控制过程复杂,同时由于捷联式三轴稳定跟踪台工作时对象呈现出非线性、强耦合和参数变化等特点,因此系统在稳态精度、响应时间、稳定性等方面的要求较高[10]。

图1 两轴两框架光电稳定平台结构Fig.1 Two-axis and two-frame photoelectric stabilization platform structure
两轴四框架是在两轴两框架的基础上增加一个内框架,与上述2 种结构相比具有以下特点:1)内框架始终保持垂直,减小耦合作用,隔离好,可消除俯仰大角度运动情形下的自锁现象,提高稳定精度;2)内外环控制回路相互独立,互不影响,且方位和俯仰回路伺服机制完全相同,设计相对容易;3)经过标准配平后负载力矩小,系统带宽增加,利于提高系统精度,且生产成本具有优势。因此本文选择两轴四框架结构方案,如图2所示。

图2 两轴四框光电稳定平台结构Fig.2 Two-axis and four-frame photoelectric stabilization platform structure
1.2 光电稳定平台模型分析
两轴四框架光电稳定平台控制系统可以分为方位轴和俯仰轴2 个相互独立的系统,而且2 个通道的控制策略基本相同,因此本文只论证方位轴的控制。方位轴伺服控制回路控制框图如图3所示,主要包括控制器、功率放大器、电机及框架负载、陀螺、编码器。

图3 方位轴伺服控制回路控制框图Fig.3 Control block diagram of azimuth axis servo control loop
为达到高精度、响应快、强鲁棒性要求,伺服控制采用电流环、速度环和位置环构成三闭环级联复合控制。其中,由陀螺反馈构成的速度环才是补偿扰动与提升光电稳定平台控制精度的关键部分。光电稳定平台单轴控制速度环的数学模型如图4所示。

图4 方位轴速度稳定控制环数学模型Fig.4 Mathematical model of azimuth axis speed stability control loop
图4 中,θi为给定的角度指令信号,w0为给定的速度指令信号,θO为框架输出角度,TL(s)为干扰力矩,f为摩擦力矩,KTVe-τTV为电视调节器,KG1(s)为位置控制器,Gv(s)为速度环伺服控制器,kPWM为功率放大系数,kg为陀螺,La、Ra为电枢电感与电枢电阻,Cm、Ce、Ja为电机的转矩系数、反电动势系数和转动惯量。
依据其物理特性,每个自由度的动态机电模型可以简化为

式中:J为转动惯量;b为 阻尼系数;u为控制输入;θ、θ˙为角位置和角速度;d为系统的外界干扰,包含摩擦干扰、不平衡力矩等;Δ(x,t)为系统的未知不可建模的非线性动态部分。
2 新型非线性扩张观测器的滑模控制器设计
2.1 新型非线性扩张观测器设计
扩张观测器的核心思想是把光电平台的外部扰动和内部扰动共同作为总扰动,将其扩张为系统新的状态变量,通过构建的状态观测器(ESO)估计出系统的总扰动,实时补偿给系统得以准确抑制。传统的线性扩张观测器对于各个状态量xi以及系统的干扰d估计精度较低且误差收敛速度较慢。线性高增益扩张观测器是通过引入足够大的高增益误差反馈,使观测器的动态远远高于系统的动态,从而提高观测误差的估计精度和收敛速度。但其也存在由于增益系数非常大,在实际工程应用中会把测量噪声放大,影响系统状态变量和误差干扰估计的精准性的缺点。因此将非线性增益引入到ESO 中,即形成非线性扩张观测器(nonlinear extended state observer,NESO),在提高误差收敛速度和估计精度的同时,尽量减小对系统的影响。设光电跟踪平台为非线性时变系统,本文将结合NESO 和有限时间收敛理论提出一种新型非线性扩张观测器(novel nonlinear extended state observer,NNESO)的设计方法。
(2)式的非线性动态的状态空间描述形式为

式中:x=[x1x2]T为系统状态变量;u(t)为控制输入;d(t)为系统总扰动。
根据(3)式把d(t)扩张成新的状态变量x3,其非线性扩张状态观测器形式为
为了避免仿真时出现高频颤振现象,可利用非线性函数在原点附近具有线性段连续幂次函数的特性,即其中0<h<1,2δ为fal(e,h,δ)函数中线性段区间的长度,如图5所示。

图5 fal(e,h,δ)函数曲线Fig.5 Function curve offal(e,h,δ)
根据(4)式结合有限时间收敛理论可以设计出新型非线性扩张观测器:


式中:ε为边界层;τ是反比与ε的常数。观测器带宽设置是控制器带宽的3~5 倍。
2.2 滑模控制器设计
系统在SMVSC 控制器中可对干扰进行补偿,使得切换增益降低,有效降低了切换带来的抖动问题。系统的控制目标是,因此设计滑模切换函数为。其中,c>0(c值决定收敛速度),e=θd-θ为跟踪误差。
由系统模型可以推导出:

对于滑模变结构控制可取控制律为

则得出:

闭环系统的李雅普诺夫函数为

根据(7)式和(11)式可得
控制系统的收敛性可表示为

式中k1=2min{k,K}。
V:[0,∞)∈R,˙V≤-αV+f,∀t≥t0≥0
针对不等式的解[11]为

式中 α为任意常数。
根据(14)式可以解出(13)式,V(t)≤e-k1(t-t0)×V(t0)。由此可知方位轴系统指数收敛,其收敛精度取决于k1值的大小。
3 实验结果分析
3.1 扩张观测器实验分析
为验证扩张观测器对不确定干扰估计的有效性,本文在仿真实验中对于慢变化干扰、快变化干扰及不确定干扰,线性高增益扩张观测器、非线性扩张观测器、以及改进型非线性扩张观测器的实现结果进行综合对比,3 种不同扩张观测器作用对比控制框图如图6所示。NNESO 的相关参数选取β1=100,β2=200,β3=2 500,p1=0.9,pi=ip1-(i-1),1<i≤3;1 <i≤3及k1=6,k2=300,k3=9 000。线性高增益扩张观测器(LHESO)与非线性扩张观测器(NESO)相关参数选取相同,另外NESO 中的其他参数τ=45,δ=0.05。
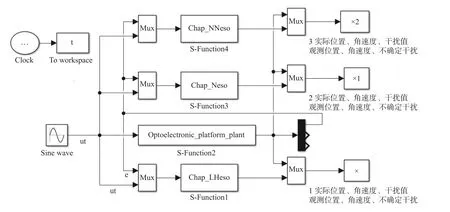
图6 3 种不同扩张观测器作用对比控制框图Fig.6 Comparison control block diagram of three different expansion observation effects
实验1。加入d=0.5×sin(0.5πt)慢变干扰,仿真实验结果如图7所示。

图7 慢变干扰及误差Fig.7 Slowly varying interference estimation and error
此实验验证对比3 种干扰补偿方法对慢变干扰的估计。从图7 可看出,LHESO、NESO、NNESO 3 种估计方法的稳态误差为0.03、0.023、0.001 5,表明NNESO 对于干扰估计具有高有效性。
实验2。加入d=0.5×sin(10πt)快变干扰,仿真实验结果如图8所示。
此实验验证对比3 种干扰补偿方法对快变干扰的估计。从图8 可看出,LHESO、NESO、NNESO 3 种估计方法的稳态误差为0.37、0.43、0.03,表明LHESO、NESO 对快干扰几乎失效,而NNESO 对于干扰估计仍然具备有效性。

图8 快变干扰估计及误差Fig.8 Fast-changing interference estimation and error
此实验验证对比3 种干扰补偿方法对不确定干扰的估计。从图9 可看出,LHESO、NESO、NNESO 3 种估计方法的稳态误差为0.78、0.68、0.014,表明LHESO、NESO 对干扰几乎失效,而NNESO 对于干扰估计仍然具备有效性。


图9 复杂不确定干扰及误差Fig.9 Complex uncertain interference estimation and error
总上所述,设计的新型非线性扩张观测器性能皆优于线性高增益扩张观测器和传统非线性扩张观测器,并能够满足滑模控制的快速切换特性,对动态干扰和参数变化都能有效进行估计。
3.2 闭环控制系统结果分析
针对两轴四框架光电稳定平台SMC+NNESO控制策略的有效性按照图10所示结构形式进行仿真验证。模型参数J=0.002 4,b=0.071 4。控制系统中加入正弦动态干扰信号作为对外界的其他干扰因素。同时,由于摩擦是干扰力矩的主要来源,低速和换向时,静摩擦和动摩擦来回交替会使运动不流畅,称为爬行现象。在高速时,由于摩擦的过阻尼特性会使实际速度低于期望速度。为此需要在仿真实验中加入Lugre 摩擦模型[11]:

图10 SMC+NNESO 闭环控制结构Fig.10 Closed-loop control structure of SMC+NNESO

式中:σ0、σ1,是动态摩擦参数,取值为σ0=130,σ1=1.8;FC、FS、α、VS是静态摩擦参数,取值FC=0.32,FS=0.29,α=0.02,VS=0.01。
为了验证系统动态情况下的性能,输入位置指令θd=3×sint正弦信号,首先观察加入系统干扰时SMC 闭环控制误差状态,再观测SMC+NNESO 控制作用下系统的位置跟踪输出、控制量输出、位置跟踪误差和角速度误差状态,实验结果如图11 和图12所示。从图11 可看出,位置响应在0.1 s 后跟踪误差降为0.000 4,速度响应在0.18 s 后与理想期望值相等。
从图11 和图12(c)、12(d)的对比可以看出,闭环系统再加入非线性扩张观测后能够将干扰估计值补偿给控制器,所以系统一旦进入稳态跟踪误差基本为零。而仅SMC 控制的回路无法获知干扰,干扰一直无法补偿,因此跟踪误差将一直存在。SMC 控制闭环系统位置,速度跟踪响应曲线因为与SMC+NNESO 控制的响应曲线基本一致,无法直接观察出,因此为避免造成误解未列出。


图11 SMC 闭环控制的误差状态Fig.11 Error states of SMC closed-loop control


图12 SMC+NNESO 闭环控制系统仿真Fig.12 Closed-loop control system simulation of SMC+NNESO
最后对加入周期突变干扰后的SMC+NNESO控制系统进行实验,实验结果如图13所示。从图13 中可看出,位置响应在0.5 s 后跟踪误差降为0.005 3,由于突变干扰影响,速度响应在0.2 s 内调节与理想期望值相等。
从图12 和图13 可以看出,光电跟踪平台闭环系统采用此种控制策略跟踪性能明显提高,且跟踪误差波动明显减小,滑模切换抖动减小,提高了整个控制系统的稳定性、快速性。


图13 SMC+NNESO 加突变闭环控制系统仿真Fig.13 Add mutation closed-loop control system simulation of SMC+NNESO
为验证系统整机的控制效果,在直升机低频0.01 Hz~1 Hz 振动条件下进行稳定精度仿真分析,结果如图14 和图15所示。

图14 方位稳定精度(49 μrad)Fig.14 Azimuth stability accuracy(49 μrad)

图15 俯仰稳定精度(56 μrad)Fig.15 Pitching stability accuracy(56 μrad)
为验证滑模变结构与新型非线性扩张观测器复合控制算法的实际效果,在某机场附近对起飞/降落飞机进行稳定跟踪实验,实验结果如图16所示。

图16 高精度光电跟踪平台外场实验Fig.16 Field experiment of high-precision photoelectric tracking platform
4 结论
通过仿真实验证明了本文提出的控制方法的可行性,能够满足高精度光电跟踪平台系统的技术要求,同时与文献[12]~[15]相比,改进的方法可使基于指数趋近律的滑模控制系统,利用新型非线性扩张观测器将干扰补偿到控制输入中,能够削弱抖动问题,增强光电跟踪平台性能。相比文献[16]和[17],本文提出的控制策略可快速估计出干扰,且将干扰应用到光电稳定平台的补偿环节中,使得系统对参数摄动及复杂非线性干扰具有强鲁棒性,较好地保证了整个伺服控制系统的平稳性和跟踪精度。在光电稳定平台的实际工程应用中多采用PID 控制、自抗扰控制、滑模变结构等,此种级联复合控制方法采用传统的控制算法,本文提出的改进方法在可靠性,环境适应性方面还需要进行大量的整体调试实验验证。
