复域压缩感知近场声图测量方法
2021-09-23陈新华郑恩明李嶷杨鹤周权斌
陈新华, 郑恩明, 李嶷, 杨鹤,2, 周权斌,3
(1.中国科学院 声学研究所, 北京 100190; 2.哈尔滨工程大学 水声工程学院, 黑龙江 哈尔滨 150001;3.中国科学院大学, 北京 100049)
0 引言
声图测量是一种通过聚焦波束形成方法实现近场精确定位的技术,被广泛应用于空气声学、水声学和医学超声领域的声学成像技术[1-3]。为得到性能较优的声图测量方法,一些学者从常规波束形成线性模型到子空间分类非线性模型进行了深入研究,并提出了一些相应改善方法[4-7]。虽然子空间分类方法所得声图具有较高的空间分辨率,但需要事先预估目标信源个数,信噪比较低时,存在目标信源个数估计不准问题,致使子空间分类方法存在漏报或虚报目标,限制了子空间分类方法在实际工程中的应用[8-11]。
压缩感知作为一种改变“奈奎斯特”采样理论的新兴理论,已被广泛应用到水下目标方位估计和定位中。例如:陈力恒等[12]将稀疏阵列接收数据模型转化为更高自由度下的单快拍接收数据模型,并结合压缩感知模型实现了稀疏阵列波束形成;李贺等[13]基于压缩感知和约束随机线阵实现了目标方位估计;沈小正等[14]基于声矢量传感器阵空间稀疏模型和压缩感知快速实现了小样本条件下的方位估计;郭双乐等[15]在水下目标定位的稀疏数学模型基础上,结合压缩感知理论,实现了高效的水下目标定位;时洁等[16]以压缩感知空间目标空域稀疏性作基础,通过构造相应的感知矩阵和观测序列实现了声图测量。但受复杂海洋环境影响,采用压缩感知进行水下目标方位估计或定位中,会存在性能下降问题,对此:康春玉等[17-18]基于压缩感知采用单快拍数据实现了目标方位估计和信号恢复,并采用重构频域阵列信号提升压缩感知在目标方位估计中的性能;周明阳等[19]基于改进的高斯先验模型提升了贝叶斯压缩感知在目标方位估计中的性能。上述基于压缩感知进行的目标方位估计或定位均是在频域实现的,构造观测序列和感知矩阵方法相似,低信噪比条件情况下,均存在一定的性能退化问题。因此,必须建立一种其他变换域压缩感知近场声图测量模型方法,通过改变观测序列和感知矩阵构建方式,提升压缩感知近场声图测量对信噪比宽容性。
1 频域压缩感知方法
1.1 信号模型
线列阵近场信号模型如图1所示,线列阵布放在空间x轴上,扫描平面上有K个声源,K∈[1,M],M为线列阵传感器个数,图1中展示了第k个声源与线列阵之间的空间几何关系,k∈[1,K]。

图1 均匀线列阵布放示意图Fig.1 Schematic diagram of liner array layout
图1中:(0,0)为线列阵中心位置;1#为线列阵第1个传感器编号;M#为线列阵第M个传感器编号;R为声源相对线列阵中心位置距离标识;θ为声源相对线列阵整横方向夹角标识;N为空间扫描点数,N≫K.
如图1所示,令K个近场声源相对该线列阵中心位置(参考点)所在空间位置为(RK,ΘK)=[(R1,θ1),(R2,θ2),…,(RK,θK)],则线列阵拾取数据X(f)(后续简称阵列数据)可表示为
X(f)=A(RK,ΘK)S(f)+V(f),
(1)
式中:f为频率变量;S(f)为K个声源辐射信号,S(f)=[S1(f),S2(f),…,SK(f)]T;V(f)为线列阵拾取背景噪声数据,V(f)=[V1(f),V2(f),…,VM(f)]T;A(RK,ΘK)为线列阵阵列流形矩阵,A(RK,ΘK)=[a(R1,θ1),a(R2,θ2),…,a(RK,θK)];(·)T为矩阵转置运算符。
在近场声传播中,a(Rk,θk)的具体形式为:
a(Rk,θk)=[e-j2πfτk,1,e-j2πfτk,2,…,e-j2πfτk,M]T,
(2)

1.2 声图测量原理
a(fj,(n,n))=
[e-j(2πfj/c)τn,1,e-j(2πfj/c)τn,2,…,e-j(2πfj/c)τn,M]T.
(3)
阵列数据的频域窄带模型可表示为
(fj)=A(fj,N,N)S(fj)+V(fj).
(4)
很显然,A(RK,ΘK)∈A(fj,N,N);在(RK,ΘK)位置上,S(fj)值较大,而其他位置上,S(fj)较小,即S(fj)是信号空间域的一种稀疏表示。此时,如果将(fj)作为观测序列,A(fj,N,N)作为感知矩阵W(fj,N,N),S(fj)为待求解稀疏系数分量,则可按压缩感知模型通过求解如下凸优化问题实现空间信号稀疏系数S(fj)求解。
(5)
通过S(fj)计算出每个扫描点上对应的信号能量,如(6)式所示,即第j子带的声图测量,且在存在目标位置(RK,ΘK)上有最大值,而无目标位置则为一个足够小的值。
P(fj,N,N)=|S(fj)|2.
(6)
所有子带重复上述过程,并对P(fj,N,N)累加求和,可得宽带声图测量结果P(N,N),搜索P(N,N)峰值位置即可完成对(RK,ΘK)估计。
(7)
(5)式是基于阵列数据频域形式实现近场声图测量[17-18],本文将该方法称为频域压缩感知(FCS)方法。
由凸优化问题来求解过程可知,FCS方法凸优化求解过程核心步骤是根据观测序列(fj)和感知矩阵W(fj,N,N)按S(fj)=(WT(fj,N,N)·W(fj,N,N))-1WT(fj,N,N)(fj)求解空间信号稀疏系数,该结果只是对观测序列采用线性累加方式近似求解得到空间信号稀疏系数,未对观测序列做相应变换处理以提高观测序列数据所含信噪比,提升凸优化求解稳定性。
2 复域压缩感知方法
2.1 问题解析
由FCS近场声图测量模型可知,利用频域数据构建观测序列时,只是利用各传感器数据自身信息,并未利用各传感器数据中信号与噪声相关性差异特性实现处理数据所含信噪比的增强。对此,本文提出一种复域处理方法,在复域通过对各传感器数据进行相关、累加处理,提升压缩感知重构声图的稳定性,称之为复域压缩感知(CCS)方法。
2.2 原理分析

可得经时延补偿后数据为
(8)
(9)
式中:I=[1,1,…,1].
为了实现CCS近场声图测量模型构建,对(9)式进行变换处理,将I作为观测序列,P(N,N)作为待求解稀疏系数分量,则感知矩阵W(N,N)=[W(1,1)W(2,2) …W(N,N)],W(n,n)可设计为
W(n,n)=
(10)
采用(10)式处理后,可使阵列数据相关所得结果变为与扫描位置信息有关的列数据,赋值到感知矩阵相应列中,完成感知矩阵构建。
最后,可通过求解如下凸优化问题来求解空间信号稀疏系数S(t):
(11)
根据空间信号稀疏系数S(t),此时可得近场声图测量结果P(N,N),搜索P(N,N)峰值位置即可完成对(RK,ΘK)估计。
P(RN,N)=|S(t)|2.
(12)
2.3 能力分析

(13)
(fj)=[X1(fj),X2(fj),…,XM(fj)]T=
[S(fj)+V1(fj),S(fj)+V2(fj),…,S(fj)+VM(fj)]T,
(14)
式中:S(fj)为代表空间目标信号;Vm(fj)为第m个传感器噪声数据。观测序列每个位置数据所含信噪比为
(15)
同样,由(13)式和(10)式可知,事先将阵列信号处理引入到感知矩阵构造中,充分利用了信号噪声之间相关性差异特性,通过对阵列数据进行相关、累积处理,可使感知矩阵各位置数据具有一定阵增益,因而CCS方法中感知矩阵每个位置元数所含信噪比为
(16)
对比(15)式和(16)式可知,通过将FCS方法中观测序列数据移植到感知矩阵构建中,CCS方法提升了感知矩阵每个位置数据所含信噪比,改善了FCS方法对声图重构效果,对最低信噪比的适应性得到近10lgMdB提升。
由此可知,CCS方法与FCS方法本质区别是压缩感知数学模型构建中对阵列数据处理方面的不同。FCS方法是直接将阵列数据作为观测序列;然后再采用完备阵列流形或阵列某一传感器数据形成感知矩阵;在压缩感知模型构建中未对阵列数据之间进行相应处理。而CCS方法首先对FCS中观测序列数据进行相关、累加等处理,即将FCS方法中观测序列数据事先进行非线性处理,将其移植到感知矩阵构建中,即利用观测序列各位置数据所含信号、噪声相关性差异特性提升感知矩阵各位置数据所含信噪比;之后采用凸优化求解方法对空间信号稀疏系数求解过程进一步对阵列数据作了二次非线性处理,提升了求解空间信号稀疏系数的稳定性。
2.4 CCS方法实现
由2.3节理论分析可知,CCS方法实现流程如图2所示,具体过程可分为如下步骤实现:

图2 复域压缩感知方法实现流程图Fig.2 Flow chart of compressed sensing in complex domain
输入:阵列数据x(t),处理频带[wd,wu],wd为处理频带下限,wu为处理频带上限,L为分帧数。
输出:声图P(N,N),目标位置估计值(K,K)。


5) 更新处理帧数据,l=l+1,重复执行步骤2至步骤4,直到l=L;
6) 对L个声图测量值Pl(N,N)进行累加处理,得到本次处理最终声图测量值:
(17)
7) 对P(N,N)进行峰值筛选,可得到目标位置估计值(K,K)。
3 数据处理分析
由于本文只讨论CCS近场声图测量模型搭建思路,与凸优化算法无关,所以后续数据处理分析中,无论是FCS方法还是CCS方法,均采用正交匹配跟踪(OMP)算法实现对声图重构。
3.1 数值仿真分析
3.1.1 单目标情况
在该仿真中首先按表1所示参数进行设置,然后采用不同方法进行处理分析。

表1 水平阵仿真参数Tab.1 Numerical simulation parameters of horizontal array
扫描平面为水平距离[20 m,100 m]、方位角度[-90°,90°]形成的区域,将该区域按扫描网格划分,垂直方向网格间距为2 m,水平角度网格间距为1°.在最小方差无畸变响应(MVDR)方法、多重信号分类(MUSIC)方法、FCS方法和CCS方法实现中首先对单次处理数据分64帧处理,相邻帧按半帧采样数据重叠处理。图3~图5为目标信噪比(SNR)为-25~0 dB情况下,由MVDR方法、FCS方法和CCS方法通过200次独立统计所得目标检测概率和估计均方根误差(RMSE).

图3 4种方法的目标检测概率Fig.3 Target detection probabilities of four methods
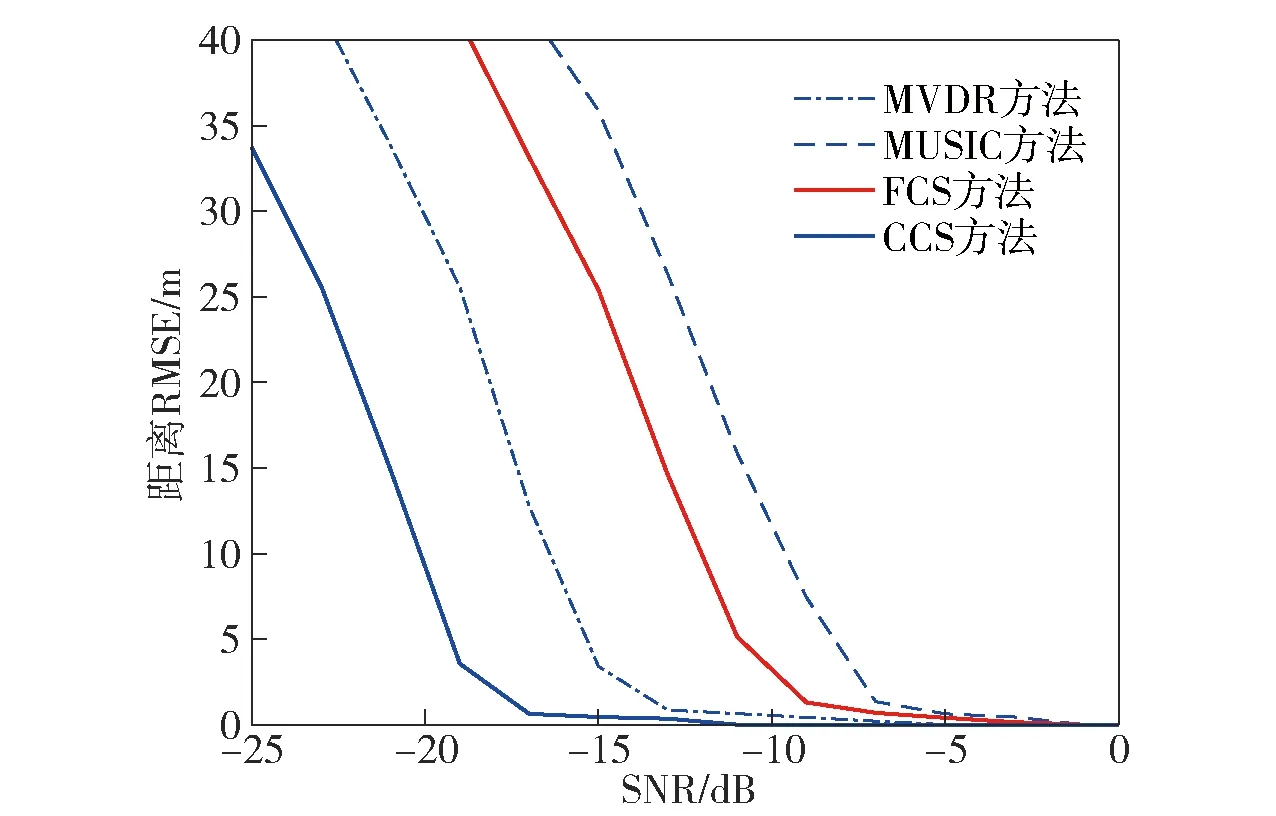
图4 4种方法的距离估计RMSEFig.4 RMSEs of space estimation of four methods

图5 4种方法的方位估计RMSEFig.5 RMSEs of bearing estimation of four methods
由图3~图5的仿真结果可知,相比FCS方法,CCS方法对最低信噪比要求上降低了8 dB,提升了压缩感知重构声图稳定性,低信噪比情况下实现了对目标位置有效估计。
3.1.2 多目标情况
阵列参数、数据处理参数以及4种方法实现与单目标情况一致,目标信号为两个等强度信号,频带为200~500 Hz,目标分别位于相对线列阵阵中心(40 m,-2°)和(40 m,2°)位置处。 图6~图8为不同信噪比情况下,由4种方法所得声图。
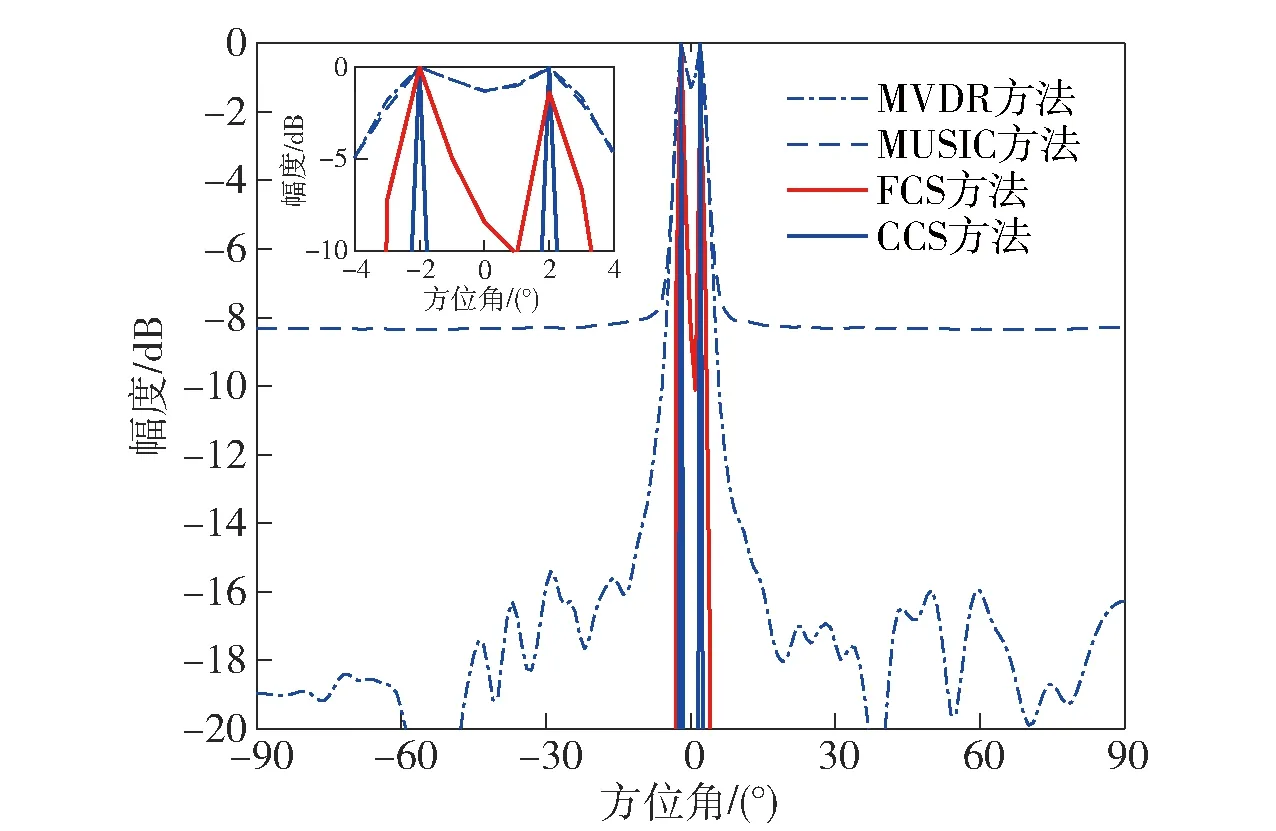
图6 4种方法所得40 m处不同方位声图(SNR=5 dB)Fig.6 Output acoustic images at 40 m obtained by four methods (SNR=5 dB)
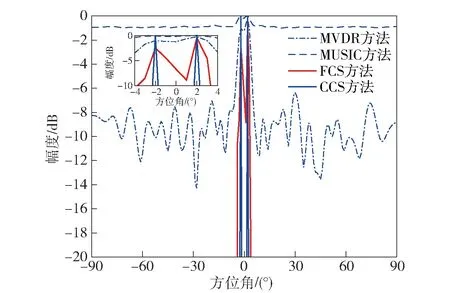
图7 4种方法所得40 m处不同方位声图(SNR=-5 dB)Fig.7 Output acoustic images at 40 m obtained by four methods (SNR=-5 dB)

图8 4种方法所得40 m处不同方位声图(SNR=-15 dB)Fig.8 Output acoustic images at 40 m obtained by four methods (SNR=-15 dB)
由图6~图8仿真结果可得:相比MVDR方法和MUSIC方法,FCS方法和CCS方法具有更窄的主瓣宽度,可对相邻目标实现高分辨检测和分辨;但随着信噪比的降低,MVDR方法和MUSIC方法分辨能力下降较为厉害,在SNR为-5 dB时,MVDR方法和MUSIC方法已不能对两目标的实现有效分辨,而FCS方法和CCS方法同样保持着高信噪比情况下的目标分辨能力;但在SNR为-15 dB时,FCS方法所得声图中两目标之间的背景级受噪声污染比较严重,已无法对两目标实现有效检测。
3.1.3 运算量分析
由于CCS方法可事先求取所需复解析小波,所以影响CCS方法运算量主要因素为复解析小波函数与阵列数据卷积运算、协方差矩阵求取以及OMP求解,FCS方法的运算量主要在于傅里叶变换、协方差矩阵及其求逆运算以及OMP求解,由于FCS方法和CCS方法都有OMP求解过程,后续两种方法计算复杂度比较过程不再将OMP求解过程考虑进去。

3.2 海试数据分析
本次处理数据由进行近场目标定位试验所得,相关参数如表2所示。
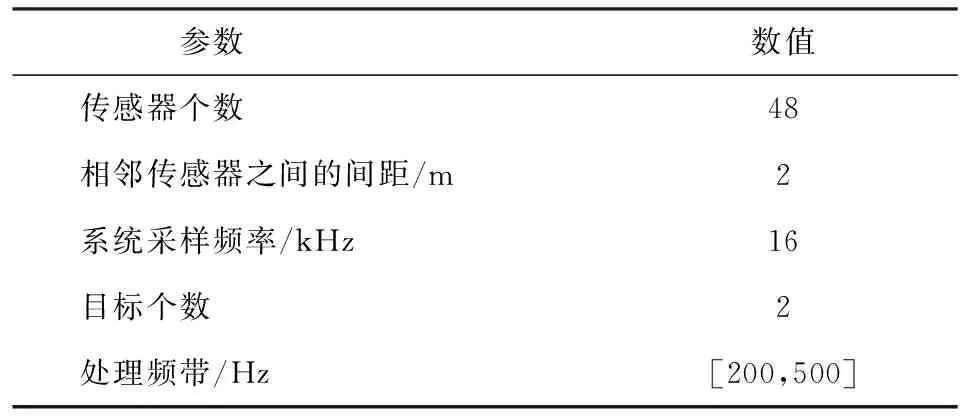
表2 水平阵数据处理参数Tab.2 Parameters of processing data
水平阵布放示意图如图9所示,在小于100 m、-90°~90°范围内,存在两个近场目标,两个目标辐射信号频带主要为200~500 Hz.扫描平面为水平距离[20 m,100 m]、方位角[-90°,90°]形成的区域,将该区域按扫描网格划分,垂直方向网格间距为2 m,水平角度网格间距为1°.在该处理数据时段,目标1相对水平阵中心位置(52 m,-16°)附近处,目标2相对水平阵中心位置(68 m,-9°)附近处。

图9 阵列布放示意图Fig.9 Schematic diagram of array layout
4种方法处理过程与3.1.1节数值仿真一致。图10~图13为4种方法所得某一时声图。

图10 MVDR方法所得声图Fig.10 Output acoustic image obtained by MVDR method

图11 MUSIC方法所得声图Fig.11 Output acoustic image obtained by MUSIC method

图12 FCS方法所得声图Fig.12 Output acoustic image obtained by FCS method

图13 CCS方法所得声图Fig.13 Output acoustic image obtained by CCS method
由图10~图13所示结果可知:MVDR方法和MUSIC方法背景级较高,显示效果较差,影响最后目标位置估计;FCS方法受信噪比影响比较严重,主要原因在于采用FCS模型构建观测序列时,其稳定性差于经过多个时域采样点数据相关处理后数据,在低信噪比下,再采用凸优化进行空间信号稀疏系数求解所得结果稳定性不如高信噪比下稳定,容易致使其他位置处出现虚假目标;而CCS方法所得声图能清晰显示两目标位置,且目标方位明晰可辨,背景级远低于另外3种方法,该现象进一步说明了通过对复域数据进行相关、累加处理,提升了基于压缩感知模型的近场声图测量性能。
实测数据处理结果再次验证:CCS方法通过对阵列数据进行复解析变换和数据相关处理,在低信噪比下对目标位置实现了有效估计。
4 结论
针对FCS近场下降的问题,本文从观测序列和感知矩阵构建方面入手,通过对压缩感知观测序列进行相关、累加预处理,将观测序列数据移植到感知矩阵构建中,并根据目标在空间域的稀疏性,构建了复域压缩感知凸优化模型,实现了CCS近场声图测量。
本文方法的关键是采用相关、累加处理对阵列数据进行预处理,构建感知矩阵和凸优化问题,得到了具有更高信噪比的感知矩阵,保证了后续声图测量方法性能提高。数值仿真和实测数据处理结果均证明了CCS方法在声图测量方面的有效性,待别是在弱目标检测方面明显优于FCS方法。
另外,可以预见,如果进一步采用改善FCS的方法来改善CCS方法,则CCS方法的声图测量性能也将会进一步得到改善,这也是后续需要进一步研究的问题。