基于分层控制的混合动力车辆实时能量管理策略
2021-09-23陈路明廖自力马晓军刘春光
陈路明, 廖自力, 马晓军, 刘春光
(陆军装甲兵学院 兵器与控制系, 北京 100072)
0 引言
多轴轮式车辆多用于工程运输、现代农业以及军事投送等诸多领域,具有载重能力强、越野机动好等优势,在相关行业得到广泛应用[1]。但是,车辆的高动力性往往伴随着高油耗和高排放,这与当前倡导的节能减排的发展大势相悖。为此,各主要车企提出了多种不同的解决方案。随着电机集成化水平、电池功率密度以及电控实时性等技术的提升,混合动力技术的优势日益凸显,成为当前研究的热点[2]。
为最大程度发挥混合动力车辆的结构优势,研究人员围绕能量管理策略进行了大量的研究工作。文献[3]制定了面向燃料电池汽车的模糊控制规则,通过燃料电池补偿动力电池放电,保证了整车具有较高的动力性和经济性。文献[4]以并联式混合动力车辆为研究对象,采用混杂模型预测控制算法求解最优控制方案,显著提升了车辆燃油经济性。文献[5]提出了一种基于进化- 增强学习方法的插电式混合动力公交车能量管理策略,通过离散优化求解,降低了车辆燃油消耗。上述公开文献中能量管理策略大多基于民用道路车辆进行开发,运行工况相对简单,且可通过车载定位装置等进行辅助驾驶,策略开发较为容易[6]。然而,多轴车辆大多工作在恶劣非道路路况下,功率变化较为频繁,未来工况无法预知,难以通过简单移植民用车辆能量管理策略形成对车载混合动力系统的高效控制,因此需要结合该系统特点,制定相应的能量管理策略。
本文以多轴轮式混合动力车辆为研究对象,采用前置小波滤波与后置模型预测控制相结合的方法,制定基于分层控制的实时能量管理策略,对多种动力源进行在线协调控制,以优化燃油经济性,并通过硬件在环实验进行验证。
1 车载混合动力系统分析与建模
1.1 车载混合动力系统结构
根据动力流传递方式的不同,混合动力系统可分为串联式、并联式和混联式等多种类型。由于串联式结构方案对原车机械结构改动较小,功率流传递路径简单,且可靠性较高,成为当前混合动力车辆普遍采用的结构类型。具体而言,串联式混合动力系统是一种以电能作为基本能量传输媒介,对电能产生、存储以及转换等全过程进行控制,以支撑各类用电负载正常工作的新型动力系统[7]。混合动力系统通常包括两种以上动力源,具有系统集成度高、电压等级高以及能源形式多样等特点,成为各类用电平台的重要发展方向[8]。
在车载混合动力系统中,供电侧为3种不同属性的动力源,负载侧为8个相同参数的驱动电机,这两部分以电能作为共同媒介,通过高压直流电缆进行柔性连接,为车内空间布局的优化提供了便利条件。在工作过程中,发动机- 发电机机组承担主要动力供给任务,用于将燃油化学能转化为电能;动力电池承担辅助动力供给任务,根据控制策略提供辅助电能以优化发动机工作状态,并存储驱动电机的回馈能量;超级电容承担母线电压的稳定任务,发挥自身高功率密度优势快速响应高频电能变化;驱动电机承担电能和机械能的互换任务,能够灵活工作在4个象限,实现电动机和发电机工作状态的快速切换,有利于回收制动能量,减小机械刹车机构磨损,提高车辆动力性和能量利用效率。车载混合动力系统结构如图1所示。

图1 车载混合动力系统结构Fig.1 Vehicular hybrid system structure
1.2 车载混合动力系统建模
为便于控制策略的开发和验证,对车载混合动力系统进行分析和建模。
1.2.1 发动机建模
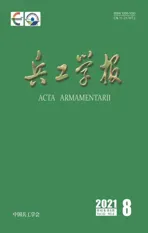
发动机工作过程十分复杂,涉及力学、化学以及热力学等多学科,其精确建模较为困难[9]。由于本文面向能量管理策略的开发,仅需关注转速、转矩以及油耗等外特性,不需模拟气缸气压、喷油量等复杂内部过程,因此采用数据拟合的方法,建立发动机简化控制模型[10]。发动机的万有特性曲线如图2所示。
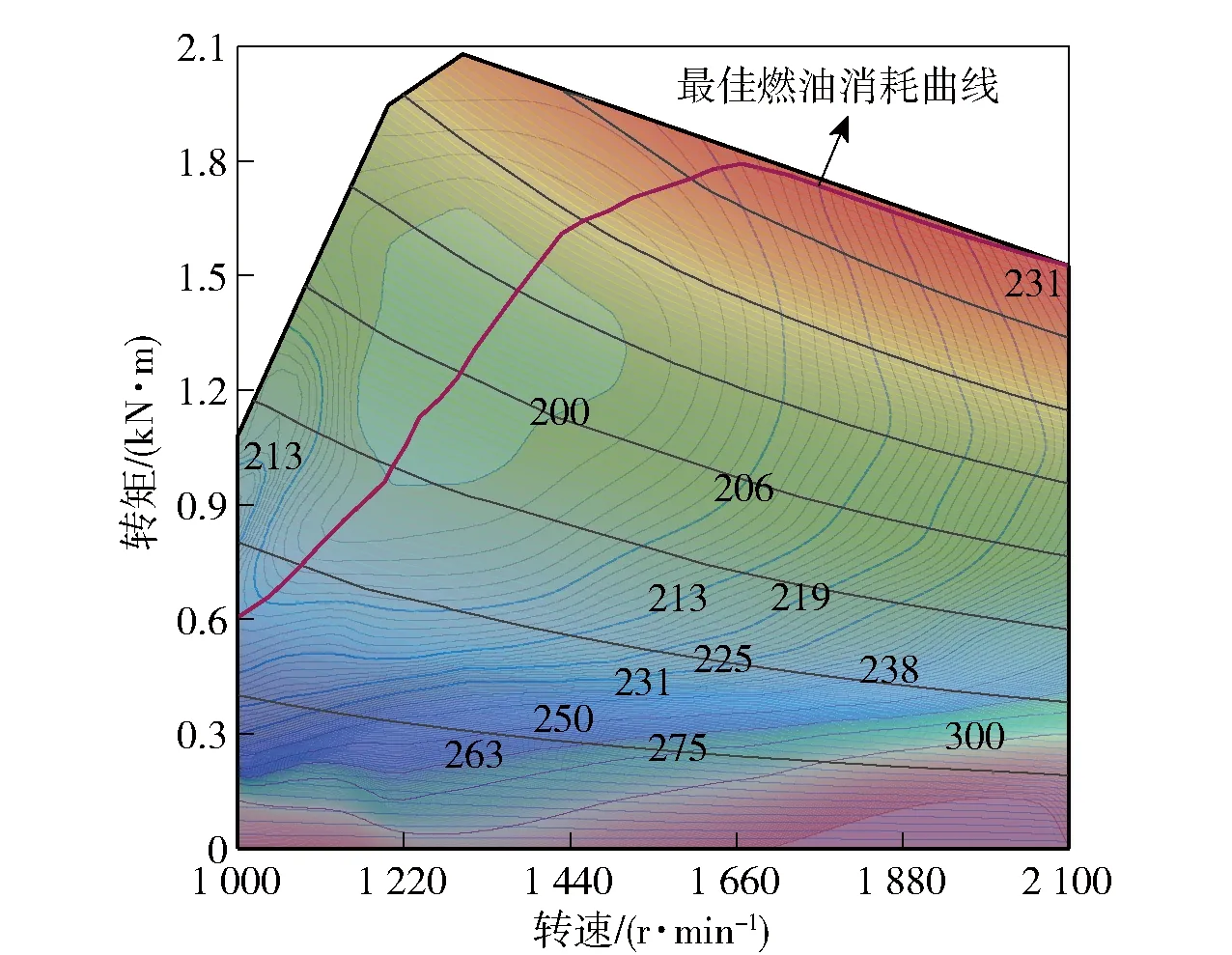
图2 发动机万有特性曲线(图中数值表示不同工作点下的燃油消耗率,单位:g/(kW·h))Fig.2 Universal characteristic curve of engine (the numerical values express the fuel consumption rates at different operating points, unit: g/(kW·h))
由图2可知,发动机燃油消耗率是以转速和转矩为自变量的函数:
(1)

为提升发动机燃油经济性,要求发动机工作在最佳燃油消耗曲线附近,此时发动机目标转速和目标转矩由目标功率唯一确定:
(2)
式中:Pe为发动机输出有效功率。
(1)式和(2)式联立,可得
(3)
1.2.2 发电机建模
发电机通常具有较高的工作效率,其工作状态与工作点在效率MAP图的分布有关,可表示为
αg=fg(Tg,ωg),
(4)
式中:αg为发电机工作效率;Tg为发电机输出电磁转矩;ωg为发电机输出转速。
1.2.3 动力电池建模
常用动力电池模型为电化学和等效电路模型,由于控制策略仅关注电压、电流等外部物理特性,不涉及内部复杂化学反应,因此采用Rint等效电路模型[11]。
由功率平衡方程,可知
Pb=UoIb-RbIb,
(5)
式中:Pb为动力电池功率;Ib为动力电池电流;Uo为动力电池开路电压;Rb为动力电池内阻。
根据动力电池定义,可知
(6)
式中:SOC为动力电池荷电状态;Qr为初始时刻剩余容量;Qu为t时间段内消耗容量;Qa为动力电池额定容量。
(5)式和(6)式联立,可得
(7)
1.2.4 双向DC/DC建模
双向DC/DC的工作效率与负载侧输出功率有关,根据实际采集数据,通过多项式拟合,可得
αd=fd(Pdc),
(8)
式中:αd为DC/DC工作效率;Pdc为DC/DC输出功率。
1.2.5 超级电容建模
超级电容采用1阶等效电路模型[12],根据基尔霍夫电压定律,可得
Uout=Us-RsIs,
(9)
式中:Uout为超级电容端电压;Us为超级电容开路电压;Rs为超级电容内阻;Is为超级电容电流。
根据电容自身物理特性[13],可知
(10)
式中:Cs为超级电容容值。
(9)式和(10)式联立,可得
(11)
式中:Ps为超级电容功率。
超级电容功率和电压关系可简化表示为
Uout=φ(Ps).
(12)
1.2.6 整车动力学建模
根据车辆动力学理论[14],可以得到行驶平衡方程
(13)
式中:FD为轮胎作用于地面的驱动力;μ为滚动阻力系数;m为整车质量;g为重力加速度;θ为坡道角度;CD为空气阻力系数;AD为车辆迎风面积;ρ为空气密度;v为实际车速;δ为旋转质量换算系数。
进而可得功率平衡方程为
(14)
式中:PD为轮胎作用于地面的驱动功率。
2 分层能量管理策略设计
混合动力结构优势的发挥离不开先进的能量管理策略[15],针对本文中车载混合动力系统兼有高能量密度和高功率密度两类动力源的特点,提出了一种分层控制的实时能量管理策略。
2.1 小波滤波层设计
小波滤波适用于非稳态和非周期性信号的时频域分析,主要包括分解和重构两种过程,代码执行效率高,具备实时运行能力[16]。为充分发挥超级电容高功率密度的优势,避免动力电池高频充放电,本文采用小波滤波,将高频功率从负载功率中分离出来。
2.1.1 小波阶数确定
为保护动力电池,小波阶数通常需要满足关系式:
(15)
式中:fb为动力电池截止频率;N为小波阶数;ts为离散采样时间。
在约束条件下,小波阶数N属于具有最小正整数边界的开区间,当N取值过大时,会造成高频功率部分所占比重急剧增大,具有低能量密度的超级电容出现大幅快速充放电,直接导致母线电压出现大幅波动,影响各类挂接直流母线设备的安全性。因此,N的取值应在可行区间内取最小值。
2.1.2 信号分解过程
由于Haar小波具有正交和紧支等特性,且具有较高的代码执行效率[17],因此本文选用该小波作为母函数,构造2通道滤波器组。在离散方程中,高通和低通分解滤波器的定义分别为
(16)
式中:Hh(z)和Hl(z)分别为高通和低通分解滤波器;z为复频域中的变量。
原始信号经过分解滤波器后,可以得到表征信号波动大小的小波系数。为提取高频和低频信号,分别将各阶高频小波系数和4阶低频小波系数进行独立分组,为信号重构提供参考。
2.1.3 信号重构过程
通常小波分解得到的小波函数和实际功率幅值并不相等,为得到最终可用的功率信号,需要依据高频和低频小波系数进行信号还原[18],重构滤波器定义为
(17)
式中:Gh(z)和Gl(z)分别为高通和低通重构滤波器。
各阶高频系数重构后,累加得到总的高频功率分量;最高阶低频系数重构后,可以直接得到所需的低频功率分量。
2.1.4 小波应用
由于本文离散采样时间为5 ms,动力电池截止频率取为10 Hz,得到小波阶数为4,小波分解和重构如图3所示。图3中,H1、H2、H3、H4分别表示1阶、2阶、3阶、4阶各阶高频分量,L4为4阶低频分量。
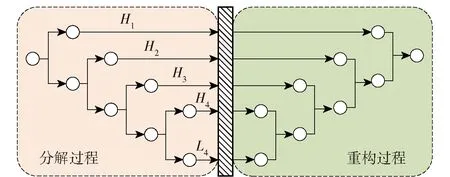
图3 4阶小波分解和重构示意图Fig.3 Schematic diagram of fourth-order wavelet decomposition and reconstruction
负载功率经过小波滤波层后,可得
Pt=Pl+Ph,
(18)
式中:Pt为负载总功率;Pl为低频功率分量;Ph为高频功率分量。其中,高频分量Ph由H1、H2、H3、H4经过重构得到,低频分量Pl由L4经过重构得到。高频功率分量特性近似于均值为0的白噪声,该部分功率经过超级电容作用后,其高频波动能够得到有效平抑,有利于保护发动机- 发电机组和动力电池组等惯性动力源,提高母线电压品质。
2.2 模型预测控制层设计
在满足动力性约束条件下,为实现燃油经济性、电池荷电状态(SOC)和母线电压稳定性的优化,采用模型预测控制方法,实时求解发动机- 发电机组和动力电池组的最优功率分配比。模型预测控制的实现主要依托预测模型、滚动优化和反馈校正3大功能模块[19]。
2.2.1 预测模型
由于发动机与发电机未经变速机构直接相连,因此二者具有相同的转速,发动机机械转矩与发电机电磁转矩由发电机效率决定,(6)式可整理为
αg=fg(αgfTe(Pe),fTe(Pe)).
(19)
双向DC/DC低压侧与动力电池相连,可自主控制电池充放电状态切换过程,因此(8)式可表示为
(20)
考虑二者工作效率,可得
Peg=Peαg,
(21)
Pbd=Pbαd,
(22)
式中:Peg为发动机- 发电机组输出到直流母线的功率;Pbd为动力电池组输出到直流母线的功率。
若直流母线侧负载低频功率已知,根据功率平衡关系,可得
Pl=Peg+Pbd+Ps.
(23)
发动机的燃油消耗量为
(24)
式中:mf为[t0,tv]时间段内的燃油消耗量;t0为起始时刻;tv为终止时刻。
设变量为
(25)
式中:x为3×1的状态向量;y为3×1的输出向量;u为2×1的控制向量;v为可测扰动。
可以得到非线性状态空间方程为

(26)
(26)式进行1阶泰勒展开,得到线性预测模型为
(27)
式中:A为3×3的系统矩阵;Bu为3×2的控制矩阵;Bv为3×1的扰动矩阵;C为3×3的输出矩阵。
2.2.2 滚动优化
为优化发动机燃油经济性、电池SOC稳定性以及母线电压稳定性,建立如下优化目标函数:
(28)
式中:J为优化目标函数;α为燃油经济性权重系数;β为电池SOC优化项权重系数;SOCr为动力电池SOC的参考值;γ为母线电压优化项权重系数;P为预测时域长度;k为假设的任意起始时刻;i为离散时间变量。
约束条件为
(29)
式中:下标min表示变量的最小值;下标max表示变量的最大值。
在显式约束条件下,利用二次规划方法实时求解最优控制量[20],可得
=arg(minJ),
(30)
2.2.3 反馈校正
由于建模不精确、参数时变和外部扰动等因素,预测模型不可避免存在误差[21]。为避免误差累积影响预测精度,利用反馈校正的方法,在每个计算周期开始时,实时获取前一时刻的总误差为
δ(k)=y(k)-(k|k-1),
(31)
式中:δ(k)为k时刻的预测误差;y(k)为k时刻的实测输出;(k|k-1)为k-1对k时刻的校正预测输出。
假设相邻时刻误差维持不变,则可对当前时刻预测结果进行校正。
(k+1|k)=y(k+1|k)+δ(k),
(32)
2.3 分层能量管理策略设计
为充分发挥两种控制方法的优势,采用前置小波滤波和后置模型预测控制相组合的方式,建立分层能量管理策略,分层能量管理策略的结构如图4所示。

图4 分层能量管理策略Fig.4 Hierarchical energy management strategy
车辆中主要的负载为8个大功率驱动电机,占据整车负载功率的90%以上,由于电机具有极快的动态转矩响应速度,使得负载侧功率需求呈现非平稳快速变化趋势[22]。基于提升安全性和效率等因素考虑,在第一层将负载功率分解为高频和低频功率,其中:前者直接由极高功率密度的超级电容进行提供,用于保护动力电池等低功率密度的动力源;后者作为模型预测的参考输入功率,用于优化燃油经济性、SOC和母线电压稳定性,通过实时优化求解,得到发动机- 发动机组和动力电池组的目标功率。上述实时能量管理策略在满足动力性前提下,充分考虑了各动力源不同的工作特性,为多动力源优化控制提供了理论支撑,成为一种实时优化能量管理解决方案。
3 仿真实验与结果分析
为验证实时能量管理策略的可行性,依托实验室先进的硬件在环仿真平台,设计具有代表性的实验方案[23]。该仿真平台结构如图5所示。

图5 硬件在环仿真平台Fig.5 Hardware-in-the-loop simulation platform
能量管理策略在实时仿真器dSPACE中编写完成后,编译为C代码后下载到实际中央控制器DSP中;混合动力系统仿真模型在RTLAB上位机搭建完成后,利用内置工具箱自动编译下载到实时仿真器RTLAB中;车辆动力学模型和路面信息在Vortex动力学仿真软件中进行代码编程,生成可视化动画界面。中央控制器DSP、实时仿真器RTLAB和动力学仿真软件通过CAN总线搭建的通信网络进行数据交互,模拟真实车辆的总线通信方式。模拟驾驶舱通过串口连接方式,分别与中央控制器DSP和动力学仿真软件Vortex建立单向通信关系,将驾驶员的踏板和挡位等信号传递到控制单元和显示单元。将实时总线分析器CANoe作为仿真节点接入CAN通信网络,用以实时监测和记录总线所需的数据流,为后续数据分析提供便利。
为考察能量管理策略在典型工作环境下的控制效果,选取车辆瞬态测试行驶工况CUEDC作为实验工况,该工况为一组从大量实际数据中提取得到的描述时间和车速关系的标准曲线[24],能够极大程度上反映车辆的真实驾驶工况,速度曲线如图6所示。
图6 CUEDC标准循环行驶工况Fig.6 CUEDC standard cycle driving conditions
车辆及环境部分参数如表1所示。

表1 车辆和环境参数Tab.1 Parameters of vehicle and environment
控制器部分参数如表2所示。表2中,各优化项权重系数的选取对能量管理效果影响较为显著,体现了驾驶员控制意图。通过前期仿真及实车试验数据可知,各优化项之间存在矛盾关系:当燃油经济性优化项权重系数较大时,要求发动机工作点靠近最佳油耗曲线分布,此时动力电池组和超级电容频繁深度充放电,电池SOC和母线电压稳定性变差;当电池SOC优化项权重系数较大时,要求动力电池减小充放电频率和深度,此时超级电容通过频繁深度充放电小幅优化发动机工作状态,燃油经济性和母线电压稳定性变差;当母线电压优化项权重系数较大时,要求超级电容减小充放电频率和深度,此时动力电池高频深度充放电,燃油经济性和电池SOC稳定性变差。在各优化项标准化处理的基础上,选取表2中权重系数组合方案,以实现多目标优化。

表2 主要控制参数Tab.2 Main control parameters
为对比不同能量管理策略的控制效果,选定模糊控制策略、单一模型预测控制策略以及本文所建立的分层控制策略分别进行仿真实验。
3.1 模糊控制结果及分析
本文采用标准Mamdani型模糊控制器结构,以负载功率以及电池SOC为输入,以发动机- 发电机组目标功率为输出,优化设计了一个两输入单输出的模糊控制器(具体设计过程可参考文献[25]),通过遍历测试,最终以数据查表形式嵌入实际控制程序进行仿真实验,部分结果如图7所示。

图7 模糊控制结果Fig.7 Fuzzy control results
图7(a)展示了模糊控制实验中的车速跟踪曲线,实际车速能够以较小偏差快速跟踪目标车速,表明车辆动力性得到满足。由图7(b)可知:发动机- 发电机组和动力电池组承担了主要的功率输出任务,且它们大部分时候工作在各自的最大功率边界;超级电容参与工作较少,且充放电深度较浅,主要用于补充能量型动力源在动态调节过程中的功率不足。由于模糊控制策略仅考虑了负载功率和电池SOC的变化情况,不具备对发动机工作点的优化功能,因此在完整工作过程中发动机工作点分散地分布在整个工作平面内,且大部分工作点偏离最佳燃油消耗曲线较远(见图7(c)),其燃油经济性势必受到影响。
3.2 模型预测控制结果及分析
不考虑小波滤波层的作用,仅将模型预测控制策略应用于仿真实验中,控制参数设置如表2所示,记录得到的实验结果如图8所示。

图8 模型预测控制结果Fig.8 Model predictive control results
在单一模型预测控制实验中(见图8(a)),实际车速能够较好地跟踪目标车速的变化趋势,且延迟和误差较小,满足动力性要求。由图8(b)可知,模型预测控制策略下为提高发动机的燃油经济性,在发动机工作点动态调整过程以及稳态工作状态下,动力电池更加频繁地参与到工作过程中,通过额外提供一部分充放电功率,实现了对发动机工作点的有效调节。因此发动机工作点较为集中地分布在最佳燃油消耗曲线附近,但由于能量型动力源对高频目标功率指令响应不及时,仍存在少部分工作点分布到外特性边界区域(见图8(c))。在该过程中,超级电容通过快速充放电来补充高频功率不足,辅助动力电池组共同优化发动机动态调整过程。
3.3 分层控制结果及分析
采用本文所提分层能量管理策略,对混合动力车辆在典型工况下的工作过程进行仿真实验,参数设置如表2所示,记录得到图9所示结果。
从图9(a)中可以看出,实际车速和目标车速变化趋势基本吻合,二者之间仅存在小幅超调或不足,但不影响整体动力输出,因此可以认定车辆动力性得到满足。由图9(b)中各动力源输出功率可知,分层控制策略首先通过小波滤波层滤除负载功率中的高频分量,并由超级电容满足这部分功率,因此超级电容无论是在充放电频率还是深度上都得到显著提升。相应地,低频功率分量经过模型预测控制后,仍以低频形态分配给发动机- 发电机组和动力电池组两种能量型动力源,因此二者的功率变化频率得到显著降低,有利于维护工作的安全性。由于发动机- 发电机组不再承担高频功率输出任务,能够以较高的精度跟踪最优控制指令,发动机工作点密集分布在最佳燃油消耗曲线周围(见图9(c)),发动机工作点得到显著优化。
3.4 能量管理策略对比分析
为比较不同能量管理策略的控制效果,选取电池SOC、母线电压以及油耗等3项作为评价指标,分别绘制各自的变化曲线,结果如图10~图12所示。

图10 电池SOC变化曲线Fig.10 Changing curves of battery SOC

图11 母线电压变化曲线Fig.11 Changing curves of bus voltage

图12 油耗变化曲线Fig.12 Changing curves of fuel consumption
由图10可知:对于电池SOC而言,模型预测控制和分层控制变化趋势高度接近,二者均具有稳定在目标SOC值60%附近的趋势,这个过程中,模型预测控制的电池SOC优化项发挥主要作用;模糊控制下电池SOC变化幅度较大,这是因为SOC模糊输入项被设计用于优先满足负载功率需求,跟踪目标SOC的功能不显著,因此SOC趋势更多体现了负载功率的特征。
由图11可知:模糊控制中电压变化幅度和频率远远小于模型预测控制和分层控制,这是由于该控制策略下超级电容参与功率调节过程深度较浅,不易引起电压的大幅波动;模型预测控制和分层控制电压变化趋势较为接近,尤其以分层控制的电压波动情况最为剧烈,这是由于分层控制中高频功率主要由超级电容承担,快速深度地充放电过程势必造成电压剧烈波动。
对比3种不同能量管理策略下的发动机油耗变化(见图12),可知分层控制策略始终保持了较低的油耗状态,而模糊控制的油耗状态和模型预测控制交替变化,全程来看,模型预测控制的油耗整体低于模糊控制。这种结果产生的根源在于无论是模型预测控制还是分层控制,在各自优化函数中均显式地包含燃油优化项,而模糊控制仅关注负载功率是否得到满足,未考虑燃油消耗情况。
为定量分析3种不同能量管理策略的控制性能,引入均方根误差作为电池SOC和母线电压稳定性的评价指标,以完整循环工况的发动机油耗和整车等效油耗(将动力电池SOC变化量等效折算为油耗量,与发动机实际油耗量累加计算得到)作为车辆经济性的评价指标,并将中央控制器DSP最大单步运算时间记录下来,实验结果如表3所示。
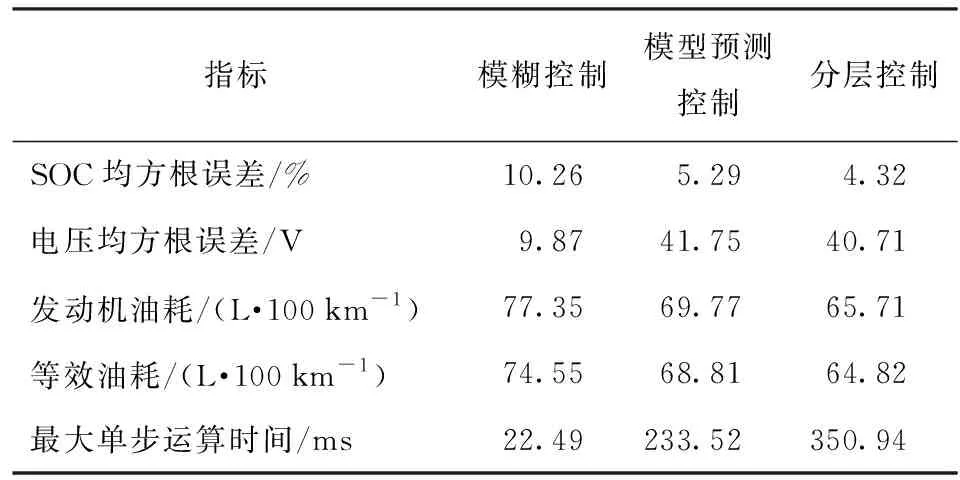
表3 指标对比Tab.3 Comparison of evaluation indicators
由表3可知,相对于模糊控制策略,模型预测控制和分层控制的指标较为接近,除因权重因子折中设置原因使得电压稳定性弱于模糊控制以外,模型预测控制和分层控制无论在电池SOC还是油耗方面均显著优于模糊控制。尤其在等效油耗方面,采用分层能量管理策略后,整车燃油经济性相比模糊控制提升了13.05%,相比单一模型预测控制提升了5.79%,验证了本文所提能量管理策略在多动力源协调控制和提升燃油经济性方面的有效性。另外,模型预测控制和分层控制最大单步运行时间分别为233.52 ms和350.94 ms,由于程序内部循环计算等原因,运算时间远大于模糊控制查表的22.49 ms,但相对1 s的控制指令输出周期,运算时间较为宽裕,体现了良好的实时计算能力。
4 结论
本文对混合动力车辆的实时能量管理策略进行了研究,基于系统部件特性,建立了不同动力源的数学建模。设计了分层能量管理策略,并与模糊规则控制和单一模型预测控制进行对比。得到如下主要结论:
1) 分析了轮式混合动力车辆动力系统的结构特点和功率流动方向,面向控制策略开发应用,采用理论分析和数据拟合方法建立了关键部件的数学模型。
2) 提出了基于小波滤波和模型预测控制方法相结合的分层能量管理策略,利用小波滤波层滤除负载功率的中高频分量,将低频分量作为模型预测控制层的参考输入,在线滚动求解带约束的多目标优化问题,得到了最优控制序列。
3) 依托dSAPCE和RTLAB硬件在环仿真平台进行仿真实验,结果表明:分层能量管理能够高效协调控制多个动力源,相比模糊规则控制燃油经济性提升13.05%,相比单一模型预测控制燃油经济性提升5.79%,证明了该能量管理策略在优化燃油经济性方面的有效性,对实际工程实践具有一定参考价值。