基于模糊控制的脉冲功率源放电时序控制研究
2021-09-23唐一林栗保明
唐一林,栗保明
(南京理工大学 瞬态物理国家重点实验室, 江苏 南京 210094)
固体电枢电磁轨道炮的弹丸发射速度可以达到2~3 km/s,在军事领域有极大的应用潜力[1]。脉冲成形网络(Pulse Forming Network,PFN)是为电磁发射装置提供电能的关键组成部分,起到了能量压缩、能量输出的功能。脉冲成形网络工作状态的可靠与可控是电磁轨道发射系统良好工作的保证。
脉冲成形网络由多个脉冲功率源模块(Pulse Power Supply,PPS)按一定拓扑结构构成,其工作方式是脉冲功率源模块按一定时序依次触发放电。所以电磁轨道发射器的影响因素除了脉冲功率源模块的自身电容、电阻、电感等参数外,触发时序也是一个重要的因素。同时为了尽可能地减少电阻梯度和增加电感梯度,减少膛内烧蚀现象,提升发射效率,理想的驱动电流波形应该尽可能地平滑。因此对脉冲成形网络中的脉冲功率源模块触发时序的研究有很强的现实意义。
目前脉冲功率源模块触发时序设定可以分为离线设定和在线控制两种方式。其中离线设定又可分为手动仿真调整、优化设计和迭代算法。手动仿真是指通过虚拟仿真软件建立发射系统模型[2-3],通过软件的示波器观察电流波形,多次调整各个脉冲功率源模块触发时刻,获得期望的电流波形,该方法对建模准确度要求较高,且调整繁琐度随着模块数量的增加而增大。优化设计是利用遗传算法、粒子群算法等优化算法及其改进算法,对放电时序进行优化,以达到电流波形最平稳、弹丸初速最大、发射效率最高等目的[4-5],该系列方法可以自动获得期望电流幅值的电源模块触发时序,但是算法复杂度高,计算时间长,容易陷入局部最优值。张洪海等[6]利用迭代法逐步推算电源模块放电过程,当输出电流达到设定下限后触发下一个电源模块,从而获得放电时序;迭代算法仿真结果与遗传算法进行对比,结果表明迭代法得到的放电时序效果优于遗传算法。在线控制方面,胡楠等[7]设计了基于DSP的脉冲功率源模块触发系统,该系统通过检测脉冲成形网络输出电流波形,当电流小于一设定值时触发下一个或几个脉冲功率源模块,该方法做到了控制电流波形以达到平顶电流波形,但是缺少对于非线性严重的发射系统以及非定值电流波形的控制研究。笔者的研究工作围绕电磁发射过程中的非线性特征建模与基于模糊控制的触发控制系统设计两方面展开。
1 多参数脉冲成形网络结构及特性
1.1 脉冲成型网络结构
电磁发射系统的脉冲成形网络是由多个脉冲功率模块按照一定拓扑结构组网而成,目前电磁发射系统常用的储能元件为电容器。一个脉冲功率模块主要由储能电容、可控硅(SCR)、调波电感、续流二极管等部分组成,并附有传感器、控制模块等附属子模块。
随着单个电容能量存储量大幅增加,脉冲成型网络设计思路已由追求能量值最大化转变为在满足能量需求下,追求系统工作更平稳。因此优化各个电源模块参数,由多参数电源模块组合成脉冲成型网络的新型拓扑结构进入研究阶段。
图1为本次实验所用的多参数电源模块的脉冲成型网络原理图。图1中每两个脉冲功率源模块为一组,C为储能电容,SCR为可控硅,D为续流二极管,L为调波电感,Load为负载。在目前控制方法验证阶段,A模块电容容量小于B模块电容容量。各个模块均以并联的方式与发射器连接。

1.2 脉冲功率源模块工作特性
脉冲功率源模块在脉冲成形网络中的工作方式可以分为同步触发和时序触发两种工作方式。同步触发是为了满足脉冲成形网络第1次放电时的高电流值要求,多个脉冲功率源模块同时触发。同时触发模块数n由式(1)~(4)迭代计算得到[8]:
(1)

(2)
(3)
(4)

时序触发为脉冲功率源模块按照一定时间间隔依次触发,这一模式主要工作在脉冲成形网络输出电流达到设定电流值后的阶段,目的是维持电流波形为平顶波形。
脉冲成形网络的工作特性非常复杂,各个模块放电状态由SCR和续流二极管工作状态决定[9]。图2为单个脉冲功率源模块电路模型,图中RL和LL为调波电感的电阻和电感值,RC、UC和C为储能电容电阻、电压和电容值,Rb和Lb为电缆的电阻与电感值,RS为SCR的电阻值,RD为续流二极管的电阻值,Uao为轨道两端电压值。

单个脉冲功率源模块工作特性可以表示为

(5)
式中:in为第n个模块中的电流;ε(t-tn)为单位阶跃函数,tn为第n个模块触发时刻。
因此脉冲成形网络输出电流i大小为
(6)
2 电磁轨道发射器动态过程建模
在电磁轨道发射器发射过程中,随着电枢的运动,一系列参数会随之改变,且这些参数引起对电流波形的影响是不可忽视的。下面将建立负载的电路模型和动力学模型。
2.1 负载电路模型
图3所示为电磁轨道炮发射器负载电路模型,其中Lr为轨道电感,Rr为轨道电阻值,Rvesc为电枢与轨道间的接触电阻,Ra为电枢电阻,RJC为附加接触电阻,R0表示电缆线路的杂散参数。

负载电路模型可表示为
(7)
式中:i为电流大小;v为电枢运动速度;L′r为轨道电感梯度。
轨道电阻Rr可以描述为[10]
Rr=Rr0+R′rx,
(8)
(9)
(10)
式中:Rr0为轨道初始电阻值;R′r为单位长度的轨道电阻值;x为电枢位移长度;t为通电时间;ρr为瞬时电阻率;μr0为轨道磁导率;hr为轨道厚度;ρr0为轨道初始电阻率;βr为电阻率热效应常数。
由式(8)~(10)可知,由于电流趋肤效应的存在,R′r的大小与轨道的通电时间t、瞬时电阻率ρr、轨道磁导率μr0等因素有关。
轨道电感Lr可以描述为
Lr=Lr0+L′rx,
(11)
式中,Lr0为轨道初始电感值。
速度趋肤效应产生的电阻Rvesc可以描述为[11-12]
(12)
式中,Rvc为比例系数,通常取值范围在1~2 nΩ·
(m/s)-3/2。
发射过程中,电枢与轨道间的接触形式为是非理想电接触,当电流经过接触区域时,只通过实际接触点形成收缩效应,从而产生接触电阻。接触电阻RJC常用以下公式进行估算:
(13)
式中:k为与材料相关的常数,对于铜-铝材料而言,k通常取0.98;m常取1;Fc为轨道与电枢间的接触力。
2.2 负载动力学建模
在电磁轨道发射器发射过程中,电枢在轨道内部会受到洛伦兹力Fp、空气阻力Fa、电枢与轨道间的摩擦力Ff,根据牛顿第二定律可得
ma=Fp-Ff-Fa,
(14)
式中,m为电枢质量。
洛伦兹力Fp可以描述为
(15)
空气阻力Fa可以描述为[13]
(16)
式中:γ为电枢前方空气的比热;ρ0为前方空气的密度;A为电枢截面积;a为电枢加速度;cf2为空气的粘滞系数;P为轨道与电枢接触面的长度。
摩擦力Ff可以描述为[14]
Ff=μFc,
(17)
Fc=F0+Fe,
(18)
(19)
式中:μ为摩擦系数;F0为电枢在装填阶段因为电枢尾翼形变而产生的结构力;Fe为电枢发射过程中的法向电磁力;lx为电枢尾翼长度;d为电枢宽度。
为了使电枢在发射初期获得尽可能大的推力,减少启动延迟,电枢初始位置通常选择4倍口径位置处,此位置记作x0,因此电枢相对于炮尾的位移可表达为
(20)
3 控制系统设计
3.1 模糊控制器设计
模糊控制是由专家构造语言信息并将其转化为控制策略的一种系统推理方法,它的控制系统设计不需要知道被控对象的精确数学模型,控制系统鲁棒性强,适用于解决常规控制难以解决的非线性、时变和滞后系统[15]。模糊控制器的这些特点能有效解决电磁轨道发射过程中的建模困难、非线性强、控制有迟滞等问题。
图4为本次设计的电磁发射系统的模糊控制系统结构,包括了数据处理、模糊化处理、模糊规则运算、反模糊化和脉冲功率源模块触发指令分配等部分。


(21)
表1为模糊控制规则表,所有规则均按照“if A and B then C”的推理条件设置。
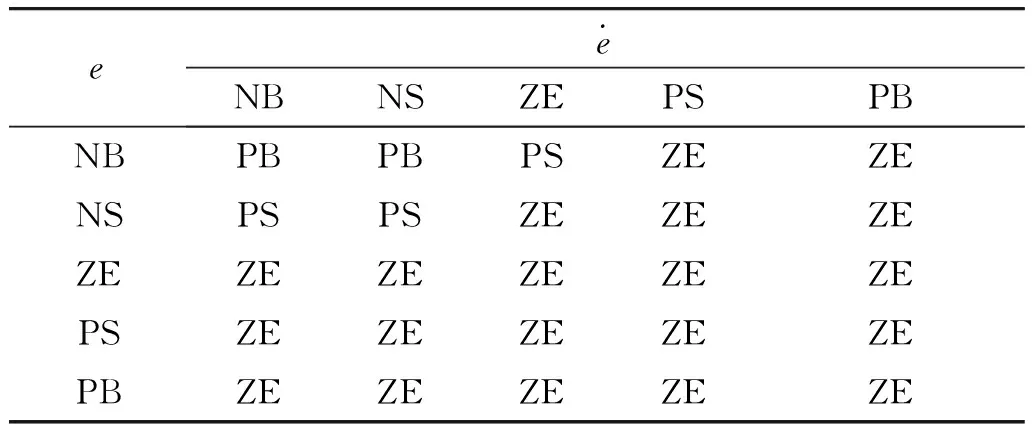
表1 模糊控制规则表




3.2 指令处理与分配系统设计
在获得模糊控制器输出值后,经过指令处理与分配系统将控制指令发送到对应脉冲功率源模块的控制模组上。该系统包括了指令辨识、同步触发、强制触发、指令分配、特殊情况触发等多个模块。其中指令辨识的作用是将模糊控制器输出转换为组内A模块或B模块是否触发的指令,其工作方式如式(22)所示,且只有当前指令与前一指令不同时输出。
(22)
通过指令辨识步骤得到组内模块A或B的触发指令后,利用如图8所示的指令分配系统将触发指令送至特定组的A或B模块。

指令分配系统主要有以下几个功能:
1)同步触发功能。通常电磁轨道发射器工作需要的电流值很高,单独一个模块提供的能量不足以达到设定电流值,需要多个模块同步触发才能达到设定电流值。同步触发模块数可以通过式(1)~(4)计算。
3)指令分配功能。存储已经使用过的组和组内模块,在获取有效指令(只触发一个模块且与上一个指令不同)后,检索还未使用完的组,查看该组内对应触发指令的模块是否已经触发。若该指令对应的模块未触发,则触发该模块,并更新已使用的组内模块信息,若组内模块均已触发,更新已使用的组信息,并从下一组开始重复检索操作。若组内有未触发模块,但指令对应模块已触发,则跳出指令分配功能。
4)特殊情况处理功能。对于正确工况以外的情况进行干涉,目前设定有以下两种特殊情况:模块工作不正常,即触发指令发出一段时间后,该模块输出电流或总输出电流没有升高的情况,报告模块编号并进入强制触发功能;重复指令,即触发指令多次指向一个已经触发过的电源模块,且电流值已经有较大偏差,报告模块编号并进入强制触发功能。
4 仿真验证
笔者采用Matlab/Simulink进行负载模型搭建和指令处理与分配系统的设计。采用10组脉冲功率源模块组组成脉冲成形网络,每个组内有两个参数不同的脉冲功率源模块。电学模型和动力学模型所用部分关键参数如表2所示。

表2 电磁发射系统建模关键参数
设定的电流波形与脉冲成形网络输出电流波形如图9~11所示,其中图9为设定值恒为120 kA脉冲成形网络放电波形,图10为设定值如式(23)所示的脉冲成形网络放电波形,图11为设定值如式(24)所示的脉冲成形网络放电波形。
i=105+108t,
(23)
i=2×105-5×107t.
(24)
定义电流首次达到与最后一次达到放电过程中最大负误差之间的电流波形为电流有效工作波形,表3为图9~11所示电流的波形跟踪设定值的评价指标。

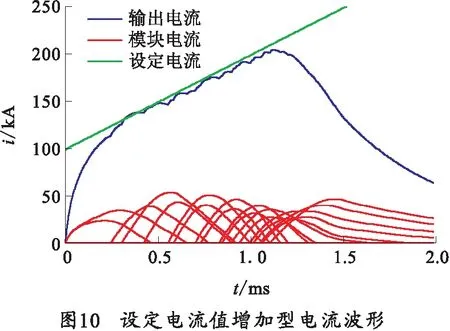
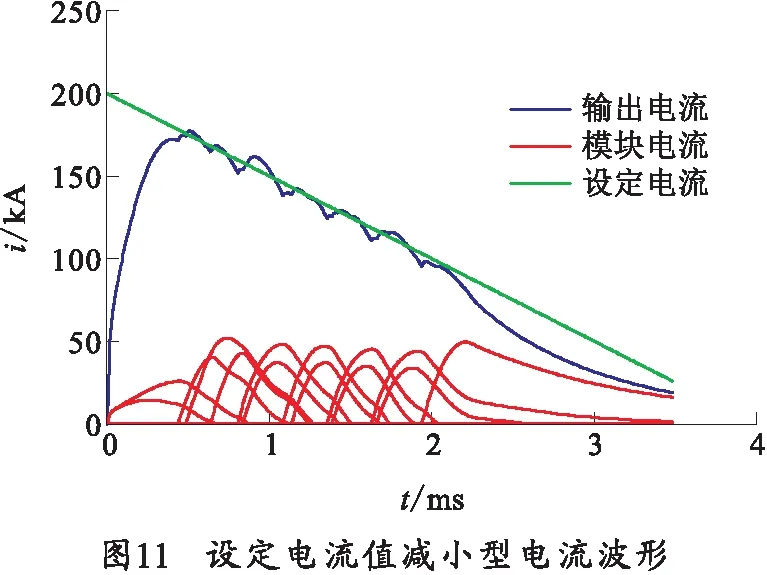
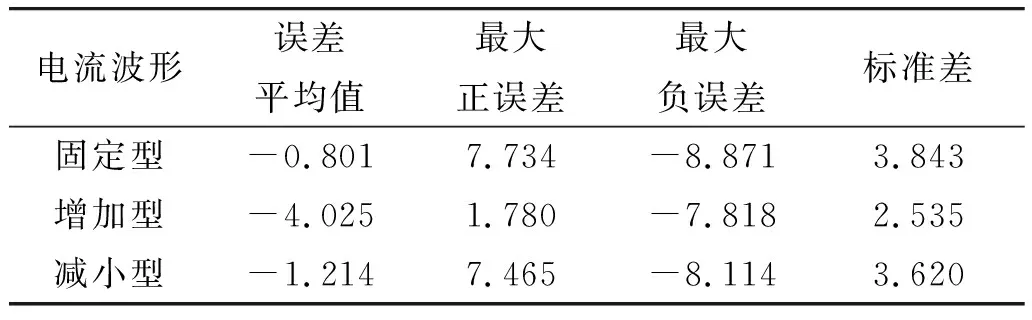
表3 电流波形跟踪评价指标 kA
由图9~11可知,在放电过程中因为非线性参数的存在,严重影响了脉冲功率源模块间放电波形的一致性,但笔者提出的控制系统仍然可以准确控制电源模块触发时序使脉冲成形网络输出波形跟踪设定值。由表3可以看出脉冲成形网络输出电流正负误差最大值、误差平均值均小于设定值两个数量级,因此可以认为设计的基于模糊控制的脉冲功率源模块触发控制系统可以使脉冲成形网络输出电流波形准确跟踪设定电流值。
5 结束语
针对脉冲功率源模块的时序设定与在线控制,提出一种基于模糊控制的触发控制系统,该系统包括了模糊控制系统、指令处理系统和指令分配系统等多个子系统。通过分析发射过程中的各种物理现象,从负载电路模型和负载动力学模型两个方面对电磁发射系统的发射过程进行数学建模。通过仿真证明提出的控制系统可以有效控制脉冲功率源模块触发时序,保证脉冲成形网络输出电流准确跟踪设定电流波形。对实际装置而言,发射过程中有更多的影响因素和不确定性存在,本文的建模只是实际装置的理论抽象,不能完全反映所有的物理现象和效应,但笔者提出的模糊控制方法在控制理论特性上是具有普适性的,其可行性并不依赖于理论模型的精确度,在理论模型和实际系统参数变化时依然具有适用性。
