无人驾驶汽车路径规划及路径跟踪的研究
2021-09-23李泽田刘昌利
李泽田,刘昌利
(1.长安大学,陕西 西安 710064;2.比亚迪汽车有限公司,陕西 西安 710119)
前言
随着无人驾驶汽车的智能化发展,路径规划和路径跟踪技术在不断地完善,跟踪精度和实时性的提高对无人驾驶汽车的可靠性具有重要意义[1]。对该领域控制技术的研究,可以推动我国智能汽车的智能化水平,使无人驾驶汽车可以实际运用在日常生活中[2]。目前已有的路径跟踪学术研究成果主要有预瞄最优控制、纯点跟踪控制、PID控制等[3]。这些控制算法往往没有考虑到车辆动力学约束,因此本文选择模型预测控制(MPC),把车辆动力学约束加入MPC控制器中,实现提升跟踪精度的作用[4]。
在实际生活中,无人驾驶汽车会遇到较为极端的工况,如冰雪路面和高速行驶等[5]。为解决该问题,本文在建立模型时对模型简化并在MPC控制器中增加约束,提高在极端工况的跟踪实时性和稳定性[6]。
1 车辆动力学建模及轮胎
1.1 车辆动力学模型
为了简化模型的复杂程度来提高模型求解的实时性,不考虑车辆垂向运动则有以下的关系:

建立车辆的受力平衡方程:
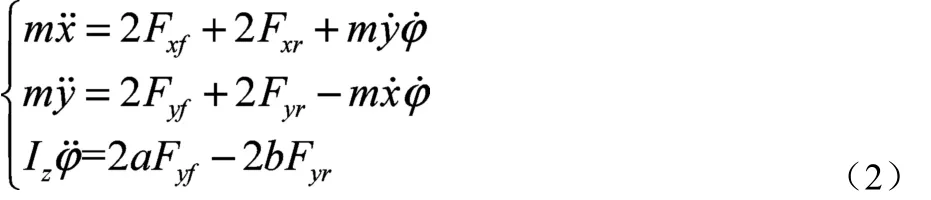
X、Y为质心横纵坐标值;φ为车辆航向角;m为整车质量;x、y为质心纵横向位移;Fyf、Fyr、Fxf、Fxr分别为前后轮所受的横向力和纵向力;Iz为车辆绕z轴的转动惯量;a、b为前后轴至质心的距离。
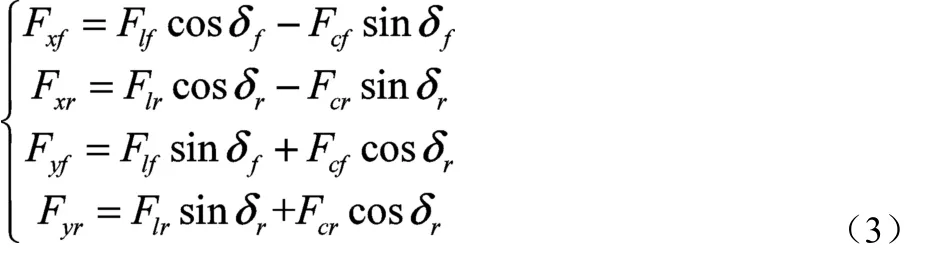
轮胎在x、y方向所受力为:Fxf、Fxr是x方向的力;Fyf、Fyr是y方向的力;Flf、Flr为受纵向力;Fcf、Fcr为横向力;δf、δr为前后轮转角。
1.2 轮胎模型
车辆在侧偏角和侧向滑移率较小的情况下轮胎力的线性关系为:

C1为轮胎纵向刚度;α为轮胎侧偏角;Cc为轮胎侧偏刚度;F1为轮胎纵向力;Fc为轮胎侧向力。

车辆的前后侧向力和纵向力:

Ccf、Ccr为前后车轮侧偏刚度;Sf、Sr为前后轮胎纵向滑移率;C1f、C1r为前后轮胎纵向刚度。推导得车辆动力学模型:

2 MPC控制算法设计
2.1 预测模型建立
模型预测控制需要线性的模型,所以需要在式(7)的基础上进行线性化,每一个时刻的系统状态量由该时刻的状态量和控制量决定,即:

泰勒公式的形式为:

此处忽略泰勒公式的高阶项,只保留其一阶项,可以得到:

将式(10)和式(8)相减得到:

简化其线性时变方程为:

上述所建立的线性化模型为:



设模型预测控制中的2个时域参数为NP和Nc,则控制器能够预测到系统的状态量为:

2.2 预测模型求解
告诉工况会发生控制量的突变,为了解决该问题,把松弛系数添加到目标函数中,目标函数如下:


跟踪误差较小时取较大值,跟踪误差较大时取较小值。式(16)中的第一项表明设置参考路径后的车辆跟踪效果,第二项表明控制量的变化平稳性,第三项为松弛系数。模型预测的最优解是控制器求出目标函数的最小值,即:

在每个控制步长中,需要对系统的控制量进行约束。控制量约束:

式中,k= 0,1,…,Nc-1。
综合考虑目标函数和约束条件后,需要在每个周期内解决以下优化问题:

3 约束条件的建立
路径跟踪的控制器除了包含控制量约束外,还有车辆动力学约束,即质心侧偏角约束和车辆附着条件约束。
3.1 质心侧偏角约束及车辆附着条件约束
影响无人驾驶车辆的最关键因素是质心侧偏角[7]。现有的学术研究成果表明,干燥沥青路面的质心侧偏角一般为±12º;冰雪路面上,质心侧偏角一般为±2º。由于本实验设定的工况是低附着条件下的仿真实验,则取−2º<β<2º在这个范围。
纵向加速度和横向加速度受到地面附着力的限制[8]:

式(20)中,ax和ay是纵向加速度和横向加速度。进一步化简:

随着附着系数μ的增大,此约束的影响程度将会减小,反之在低附着系数的工况下,横向加速度必须严格按照附着力进行约束,即该约束在本试验中也是重要约束之一[9]。为了调高求解的实时性,本试验按照各个控制周期的求解值来实时改变该约束条件,即:

其中,αy,min和αy,max为加速度极限约束。
3.2 前轮侧偏角约束优化
前轮侧偏角是路径跟踪效果的关键因素之一,随着附着系数的降低和车速的升高,其对路径跟踪的效果就尤为显著[10]。本试验中为了使轮胎侧偏角在线性范围内,规定前轮侧偏角的范围为−2.76º<α<−2.76º,并对前轮转角的变化限制一个范围−0.013 rad<Δδr<0.013 rad来进行仿真。
4 仿真验证
实验选择Carsim 和/Simulink作为平台实现联合仿真,将控制代码编写至Matlab中,然后添加到Simulink的MPC controler模块中。车型及工况用Carsim进行选择和设定。系统建模如图1所示。

图1 MPC路径跟踪模型
本试验为了更好地验证模型的可靠性,选择了较为极端的双移线型轨迹作为期望路径即参考路径。在此基础上,设定低附着路面条件的附着系数μ=0.4,高速情况下车速v= 80 km/h,期望横摆角和实际横摆角如图2和图3所示。

图2 期望横摆角
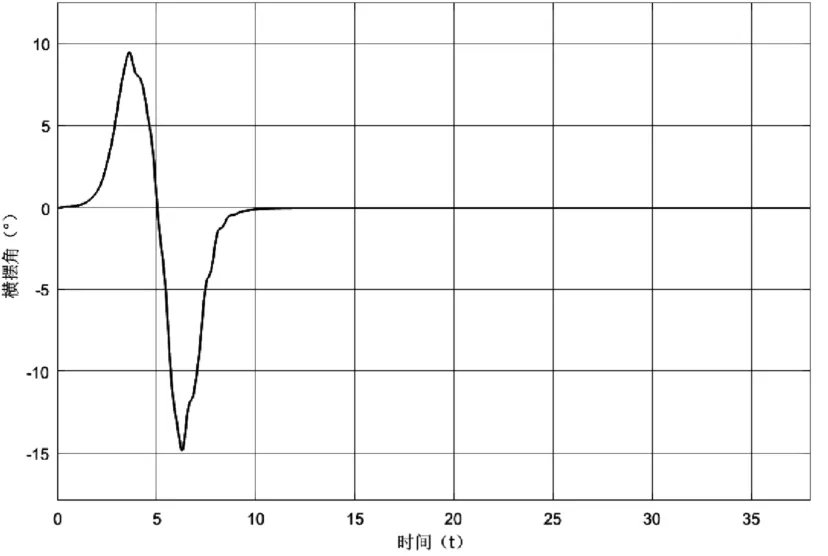
图3 实际横摆角
从图中可以看出,实际横摆角与期望横摆角的变化非常相近,只有在2 s时有一些波动偏差,原因是跟踪过程中由于方向盘转动较大而导致的,属于无人驾驶车辆的常见现象。
加入前轮侧偏角的约束后,路径跟踪效果很理想,跟踪过程和偏差变化如图4和图5所示。

图4 路径跟踪效果
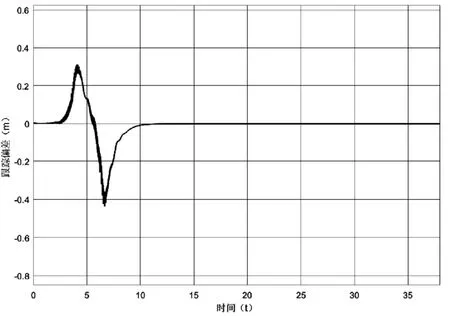
图5 路径跟踪偏差
由以上两张图可以看出,经过优化后的MPC控制器的 误差非常低,偏差在0.2以下,并且整个实际路径能够贴合设定的参考轨迹进行双移线换道,且比传统的控制器的换道过程更加平滑,不仅提高了无人驾驶的稳定性,也提高了乘客的舒适性。经过试验证明,该控制器能够适应低附着路面的高速工况下的无人驾驶车辆的路径跟踪需求。
5 结论
本文为了解决低附着路面下的高速工况的无人驾驶车辆的行驶问题,通过优化MPC控制器和增加约束来提高路径跟踪的稳定性以及换道的舒适性和平稳性。在Carsim 和/Simulink平台建立模型,设定较低的附着系数和高车速来进行双移线换道的仿真环境进行极端工况仿真试验。试验结果可以表明:实际路径能够贴合设定的参考轨迹进行双移线换道,路径跟踪误差很小,整个路径跟踪轨迹平滑,满足了无人驾驶车辆在实际运用时的需求。
