配电线路维护机器人目标识别算法设计
2021-09-22霍凯龙翁利国沈海江冯兴隆周国华
霍凯龙 翁利国 沈海江 冯兴隆 周国华

摘 要:针对配电线路维护机器人图像采集背景复杂的问题,本研究结合当前视频图像采集技术,提出一种基于图像处理的目标识别方法。在该方法中,针对目标背景复杂,容易受物体遮挡等问题,采用基于颜色直方图及形态学的方法实现了图像分割与作业目标的提取。然后,运用Canny边缘检测算法和Hough变换算法实现了图像的精准定位,并采用基于位置和大小约束的椭圆拟合法对图像进行了作业目标识别。最后,通过搭建实验仿真平台,模拟了配电线路维护机器人对图像的采集与识别,并通过对比分析了不同条件下的图像识别结果。实验结果表明,文中提出的方法可有效识别复杂背景中的熔丝管。
关键词:Canny边缘检测;目标识别;Hough变换;熔丝管
中图分类号:TP391.41;TP242 文献标识码:A 文章编号:1001-5922(2021)09-0091-05
Design of Target Recognition Algorithm for Distribution Line Maintenance Robot
Huo Kailong1, Weng Liguo2, Shen Haijiang1, Feng Xinglong1, Zhou Guohua1
(1.State Grid Zhejiang Hangzhou Xiaoshan District Power Supply Co., Ltd., Hangzhou 311200, China;
2. Automation Branch of Zhejiang Zhongxin Power Engineering Construction Co., Ltd., Hangzhou 311200, China)
Abstract:Aiming at the problem of complex image acquisition background of distribution line maintenance robot, this paper proposes a target recognition method based on image processing combined with current video image acquisition technology. In this method, aiming at the problems of complex background and easy to be covered by objects, the method based on color histogram and morphology is used to realize image segmentation and extraction of operation target. Then, Canny edge detection algorithm and Hough transform algorithm are used to realize the accurate positioning of the image, and the ellipse fitting method based on position and size constraints is used to recognize the operation target of the image. Finally, through the establishment of experimental simulation platform, the image acquisition and recognition of distribution line maintenance robot is simulated, and the image recognition results under different conditions are compared and analyzed. Experimental results show that the proposed method can effectively identify fuse tubes in complex background.
Key words:Canny edge detection; target recognition; Hough transform; fuse tube
隨着人工智能的快速发展,机器人在现代社会生产生活各个领域中扮演着越来越重要的角色,尤其是在高危险系数和复杂精细的领域中,使用机器人代替人工进行作业更是备受青睐。配电线路维护中,由于操作难度系数大,利用机器人维护配电线路已逐渐成为一种趋势。然而在实际机器人进行配电线路维护作业中,由于作业目标周围背景复杂,且容易受到光照等环境因素的影响,导致机器人无法精确识别并定位作业目标,进而无法独立完成相应的配电线路维护作业。因此,有必要对配电线路维护机器人的目标识别和空间定位进行深入研究。本研究以配电线路中最具特点的熔丝管作为研究对象,完成了对配电线路维护机器人目标识别算法设计。
1 图像预处理
配电线路维护机器人常于室外环境作业,因此其采集到的图像容易受到天气变化、太阳光照、建筑物反光等因素的影响,导致采集到的图像质量较差,不利于后期对图像的分析。尤其是在作业目标背景复杂和环境光照过强时,由于作业目标嵌入到背景中,无法直接提取目标特征;作业目标过度曝光,特征被掩盖,更不利于后期图像分析。因此,对采集到的图像进行预处理是分析图像必不可少的一个重要环节。为使配电线路机器人采集到的图像作业目标更突出,本研究以配电线路维护机器人室外拍摄的跌落式烙断照片为例,采用基于颜色直方图和形态学方法对作业目标和背景进行分割,获得了较为单一的目标图像;然后采用对比度受限的自适应直方图均衡法,对图像中作业目标的弱光区域进行了亮度提升,得到了亮度较为统一的目标图像;同时采用灰度非线性变换法,去除了图像中作业目标的局部反光;最后,通过同态滤波器,对图像全局高光进行动态调整,增强图像的对比度,进而获得较为突出的目标主体以及高质量的图像。
1.1 基于颜色直方图及形态学的图像分割
在配电线路维护机器人拍摄的跌落式烙断器照片中,由于无法避免房屋、树叶、草地等背景,因此需要对图像进行作业目标与背景的分割,去除图像中的背景。考虑到照片中烙断器与背景色差较大,本研究采用基于颜色直方图和形态学的图像分割方法,实现两者的分割。具体方法是将采集到的图像RGB颜色空间转化为HSV颜色空间,得到HSV颜色空间三通道的图像,转化公式为:
式(1)中,若MAX=min,则表示图像为纯灰色,没有色彩;若H<0则令H=H+360°,同时将H通道分量调整至[0,360°]范围内。
将图像转化为HSV空间后,若H通道中的图像前景和背景区分明显,可用阀值分割法进行图像分割。本研究中,H通道图像前景和背景区分明显,故选取Ostu最大类间方差法对图像进行分割。Ostu最大类间方差法计算简单,可自动计算阈值,且不需要人为选择参数就能得到良好的分割结果,十分适合本研究的图像分割。Ostu最大类间方差法分割流程如图1所示。
完成图像分割后,由于还需对图像进行形态学处理,故需要将HSV图像转化为RGB图像。
1.2 形态学处理
形态学处理即图像中存在的细小的干扰区域进行处理,得到干净的作业目标图像。具体方法是先断开作业目标和细小干扰区域,然后根据面积大小去除干扰区域,最后利用形态学的腐蚀和膨胀算法对图像进行处理。
腐蚀处理:S对Z的腐蚀。
膨脹处理:S对Z的膨胀。
为提高形态学算法的运算速度,本研究将该算法在二值图像中进行运算。通过形态学算法的腐蚀和膨胀作用,可将作业目标与背景之间的连接断开,并计算出连接域面积和个数,从而去除细小干扰区域。
1.3 高光图像处理
由于跌落式烙断器照片拍摄于室外,因此太阳的强光容易导致图像整体曝光过度,出现全局高光的现象,进而使得照片中的作业目标不够突出。针对该问题,本研究采用同态滤波算法进行高光图像处理。令图像f (x,y)可用照射分量s(x,y)和反射分量r(x,y)相乘来表示。
取式(4)两边的对数,并转化为相加的两个分量,然后进行傅里叶变换,得到式(5):
对式(5)进行滤波后再进行傅里叶变化,最后再进行指数运算,得到式(6)同态滤波结果。
2 作业目标识别
2.1 基于迭代阈值法的Canny边缘检测
作业目标识别首先需要进行边缘检测,以获取目标的轮廓。传统的边缘检测方法包括Sobel算子、Log算子等,但由于这些方法不能同时实现边缘精准定位与噪声抑制,故本研究采用Canny算子进行边缘检测。Canny算子可准确定位边缘,同时具有高抗噪抗干扰的能力,因此被广泛应用于边缘检测中。Canny算子主要通过双阈值法检测出图像的强边缘和弱边缘,并将强边缘和弱边缘相连,得到“最优”边缘图。检测中,由于阈值需要人为多次实验确定,容易受到光照等不确定因素影响,无法得到一个确定的固定阈值。因此,本研究提出基于梯度直方图的阈值自适应方法,选取Canny算子的阈值,并在在此基础上对图像边缘进行检测。基于梯度直方图的阈值自适应Canny算法的图像边缘检测具体步骤如图2所示。
2.2 熔丝管识别
2.2.1 管体识别
熔丝管管图像平面显示为矩形,经过边缘检测后,其主要特征表现在矩形长度方向,为两条平行的直线。因此,本研究根据该特征采用直线拟合法识别熔丝管管体。目前,常用的直线拟合法是基于霍夫变换的直线拟合法。该方法具有噪声小、鲁棒性好等特点,但由于其受直线间隙影响小,在本研究中容易误将熔丝管管体长度方向两条间隙较大的直线判断呈一条直线,或检测到图像中不存在的一些直线,因此不适用与本研究熔丝管管体识别。为解决这一问题,本研究在此基础上,采用概率Hough变换和几何约束条件对结果进行了筛选,提出一种基于几何约束的直线拟合法。该算法的具体流程如图3所示。
2.2.2 操作环识别
操作环图像的平面显示为一个圆环或椭圆,故本研究采用椭圆拟合法对操作环进行识别。椭圆拟合法,首先需要确定椭圆的五个参数,而传统的Hough变换椭圆拟合法确定参数的过程复杂且计算量大,不适用于本研究,故最终选用最小二乘法对椭圆图像进行拟合。
最小二乘法主要通过最小化整体误差寻找最佳拟合曲线,基于该方法的代数拟合法和几何拟合法虽然都能得到最小目标函数值的椭圆,但并不能反映出原始边界和得到的椭圆的关系,且容易受到噪声、孤立点的影响,导致得到的椭圆并不能准确反映出实际情况。另外,如果采用在操作环的边缘图中进行椭圆拟合,由于椭圆边缘点数量较多,容易受边缘其他物体影响,因此容易出现拟合误差较大的情况。而实际上,熔丝管管体和操作环位置具有一定的约束关系,操作环永远位于熔丝管管体的左右上方或左右下方,如图4的1、2、3、4区域。此外,熔丝管管体和操作环的大小同样具有一定的比例关系。因此,本研究提出基于位置和大小约束的椭圆拟合算法。
基于位置和大小约束的椭圆拟合算法,首先是根据熔丝管管体的位置和大小,将熔丝管管体周围划分为四个区域。然后,采用最小二乘法和随机采样原理进行椭圆拟合。最后,根据椭圆的大小和拟合率以及椭圆率对拟合的结果进行筛选,去除与实际操作环差异较大的拟合椭圆,得到较为精确的拟合椭圆。基于位置和大小约束的椭圆拟合算法的具体步骤如图5所示。
3 实验验证
3.1 实验平台搭建
为验证上述图像预处理和图像识别方法的可行性,本研究首先搭建了配电线路维护机器人图像采集的实验平台。具体方法是在机器人的机械臂后端立杆上安装一台微型固定的全景监控摄像机,用于整体环境的图像采集;在机器人两条机械臂和辅助机械臂分别安装两台双目摄像机,构成机器人的手眼系统。具体硬件平台如图6所示。
3.2 图像识别结果
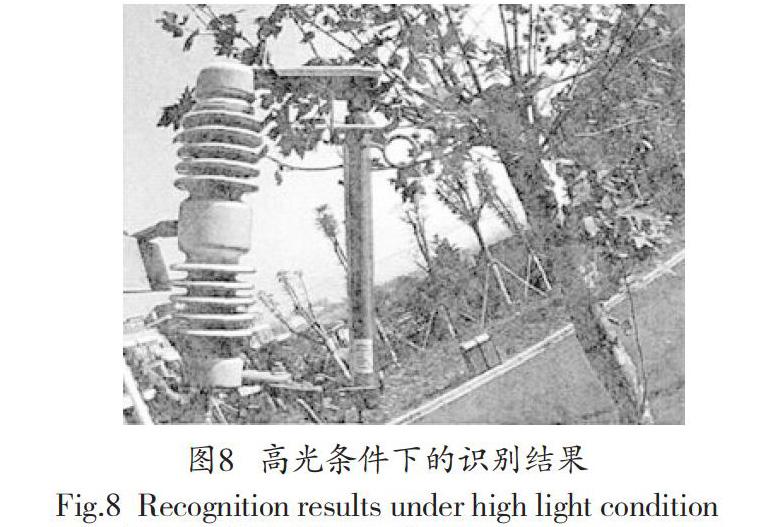
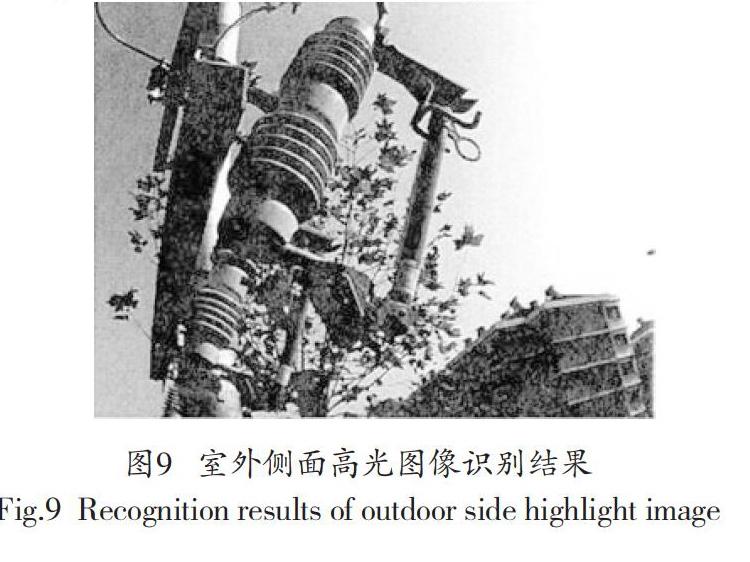
根据作业目标识别步骤,得到如图7、8、9所示的识别结果。通过分析识别结果可知,在模拟的室外配电线路机器人作业场景中,应用本研究提出的识别方法,可精确识别熔丝管,说明该识别方法具有较好的鲁棒性。
4 结语
本研究根据配电线路维护机器人图像采集背景复杂,容易受物体遮挡等问题,首先采用基于颜色直方图及形态学的方法实现了图像分割与作业目标的提取。然后,运用Canny边缘检测算法和Hough变换算法实现了图像的精准定位,并采用基于位置和大小约束的椭圆拟合法对图像进行了作业目标识别。最后,通过搭建实验仿真平台,模拟了配电线路维护机器人对图像的采集与識别,并通过对比分析了不同条件下的图像识别结果。实验结果表明,本研究提出的作业目标识别方法准确度高、鲁棒性好。
参考文献
[1]谭雪峰.自主导航农业机器人全方位视觉目标识别与跟踪研究[J].农机化研究,2017,39(12):53-57.
[2]王江明,余烨,金强,等.多梯度融合的RGBD图像边缘检测[J].电子测量与仪器学报,2017,31(03):436-442.
[3]罗陆锋,邹湘军,王成琳,等.基于轮廓分析的双串叠贴葡萄目标识别方法[J].农业机械学报,2017,48(06):15-22.
[4]李娜,陈宁.自然场景下苹果采摘机器人视觉系统研究[J].计算机技术与发展,2018,28(12):137-141+146.
[5]谢宇珅,吴青聪,陈柏,等.基于单目视觉的移动机械臂抓取作业方法研究[J].机电工程,2019,36(01):71-76.
[6]鲁晨奇,陈万米,胡晨潇.基于多传感器的篮球机器人目标识别与定位研究[J].工业控制计算机,2019,32(01):64-66+69.
[7]张桂梅,孙晓旭,陈彬彬,等.结合分数阶微分和Canny算子的边缘检测[J].中国图象图形学报,2016,21(08):1028-1038.
[8]孔德磊,方正. 基于事件的视觉传感器及其应用综述[J/OL].信息与控制:1-15[2020-09-22].
[9]陈立家,卢学,李世刚.基于实际交通流的航海模拟器智能目标船系统研究[J/OL].大连海事大学学报:1-9[2020-09-22].
[10]周克,杨倩文,王耀艺,等.一种改进的压板状态识别SSD算法[J/OL].电测与仪表:1-10[2020-09-22].
[11]杨荣,王明伟,刘思铭.基于图像处理算法的目标识别、定位与跟踪系统设计与实现[J].物联网技术,2020,10(09):75-79.
