基于双编码策略的水声OFDM 通信算法
2021-09-18邢延超秦正昌丁寒雪王言前李泽群王辛杰
邢延超,秦正昌,丁寒雪,王言前,李泽群,2,王辛杰
(1.青岛理工大学 信息与控制工程学院,山东 青岛 266000;2.Electrical and Electronic Engineering,University of Technology,Sydney 2007,Australia)
0 引言
水声通信技术广泛应用于海洋油气资源的勘探,海洋污染监测,水下救援,水下潜艇定位和导航以及水下作业等领域[1]。水声信道具有严重的多途干扰特性[2–4],使得接收信号产生畸变,影响通信系统性能,当通信载体产生巨大脉冲噪声干扰时,比如收发船发动机运行时进行通信,发动机产生巨大脉冲噪声,使得通信系统解码性能迅速降低甚至解码失效。
当前水声通信调制解调方式主要分为4 种:多进制频移键控(Multiple Frequency Shift Keying,MFSK)、单载波多进制相移键控(Single Carrier Multiple Phase Shift Keying,SC-MPSK)、扩频(Spread Spectrum,SS)和正交频分复用(Orthogonal Frequency Division Multiplexing,OFDM)水声通信算法。
MFSK的特点是性能稳健但是数据传输速率低,不能满足当下高速通信的需求[5–6];SC-MPSK的应用使数据传输速率有了显著的提高,但是受信道影响大、带宽利用不充分[7];扩频水声通信技术具有很强的抗干扰能力,并且可以在低信噪比的条件下保证通信质量,但是数据传输速率低[8–9]。OFDM 是多载波传输方案的实现方式之一,数据传输速率高,目前已广泛应用于各种无线通信中[10–11]。由于OFDM 采用多载波调制,在码元中加入循环前缀(Cyclic Prefix,CP)来对抗多途效应,并且能将噪声的能量分散到各个子载波上,减小了噪声对系统的影响,提供可靠通信,在水声通信系统中被广泛使用。因此本文提出基于双编码策略的水声OFDM 通信算法(Underwater acoustic OFDM communication algorithm based on dual encoding strategy,DE-OFDM),构建抗船舶噪声和时变多途干扰的通信体制。
1 DE-OFDM 算法原理
DE-OFDM 算法可有效对抗多途干扰,其基本思想是将要传输的数据流分配到正交的子载波上并行传输,当子载波带宽低于信道相干带宽时,呈现频率平坦衰落,再加以CP,从而减小多途的影响。
DE-OFDM 水声通信系统结构如图1 所示。在发射端,输入比特s首先进行信道编码、交织后,得到交织比特s′;串并转换得到并行交织比特s′′;DQPSK 映射和差分编码后,得到符号d;再经过IFFT 变换,得到时域发送序列x(m);添加CP、并串转换、加同步信号、D/A转换后,得到可被换能器发出的模拟信号。在接收端,接收信号y˜(t)经过A/D 转换、同步检测、串并转换、去除CP 后,得到时域接收序列y(m);经过FFT 变换后,得到符号;再经过差分解码和DQPSK 解映射、并串转换后,得到交织比特估计值;解交织和信道解码后,可得输入比特估计值。
DE-OFDM 算法采用信道卷积编码,卷积码输出的编码比特不仅与本组的信息有关,还与前面若干组的信息有关,可以起到很好的抗干扰作用。(n,k,m)卷积码在编码时把k个信息比特编成n个信息比特(k和n通常很小),m为编码约束长度,说明编码过程中有m组信息比特相互约束。卷积码的码率R=k/n,随着码率降低,抗干扰能力逐渐增强。本算法(3,1,9)卷积码如图2 所示,码率R=1/3,3 个输出比特与当前输入的1 个信息比特和前8 个信息比特有关。编码运算为:

图2 (3,1,9)卷积编码器Fig.2 (3,1,9) Convolutional coder

式中:cn为输出编码比特,sn为寄存器。
定义 θ为DQPSK 映射后的相位信息序列:

串并转换将相位信息序列分为N块,每块长度为K,满足I=N×K,相位信息矩阵可写为:

n=0,···,N−1k=0,···,K−1,插入参考相位θr

则此时相位信息序列为

用前后码元之间的相位差传输信息,差分过程如图3 所示。第一列相位 θ0减去参考相位 θr作为差分后的第一列相位d0,θ1减去d0作为差分后的第二列相位d1,以此类推。定义d0=θ0−θr,dk=θk−dk−1,经差分编码后可得相位信息为:

图3 差分编码Fig.3 Differential coding

差分编码用前后码元之间的相位差传输信息,经差分编码后的相位信息可表示为d=差分编码通过相邻码元作差,有效消除了船舶噪声和时变多途对信号的干扰。通频带的前半部分放置d,后半部分放置d的共轭,然后逐列进行M点的IFFT 变换如下:

得到时域矩阵

其中:m=0,···,M−1,k=0,···,K−1;加循环前缀、并串转换、加同步信号、D/A 转换后,可得发送的模拟信号
经过水声信道后,得到接收信号为:

其中,时变水声信道多途数为P,第p条路径的增益为Ap(t),时延为τp(t),环境噪声为ne(t),船舶噪声为ns(t)。
在接收端,先进行A/D 转换、同步检测、串并转换、去CP 后,得到时域接收矩阵[8]为:

进行FFT 变换,得到:

2 仿真试验
传输数据结构如图4 所示。1 帧数据由多块数据构成,每块数据由循环前缀CP 和有效传输数据Data 构成,同步头、同步尾采用线性调频信号,LFM1为幅值2 V的线性调频信号,LFM2为幅值1.2 V的线性调频信号,这是为了避免同步检测时检测错误。

图4 传输数据结构Fig.4 Structure of Transmitted data
南海实测水声信道如图5 所示,DQPSK100 组平均误码率如图6 所示,横轴表示信噪比(Signal Noise Ratio,SNR),纵轴表示100 组仿真试验平均误码率(Bit Error Rate,BER)。当信噪比达到13 dB 时,DQPSK 100 组仿真试验全部正确解码。

图5 实测南海信道Fig.5 Measured south China sea channel

图6 DQPSK100 组平均误码率Fig.6 Average BERs for DQPSK 100 groups
3 海上试验
2020 年7 月搭乘胶州湾船舶噪声测量试验,租用一条船接收信号,船上配有220 V,3 000 W 发电机,保障设备供电,该船以4 m/s 速度运动。水听器与钢管刚性连接,置放于水下2 m,钢管与船体刚性连接,因此高速运动时,船舶发动机使得船体震动,带动水听器产生震动,接收信号受到船舶噪声干扰。
试验测量的归一化船舶噪声如图7 所示。

图7 实测船舶噪声Fig.7 Measured ship noise
4 水箱试验
水箱长1.16 m,宽0.76 m,高0.62 m。收发节点水平距离0.40 m,换能器和水听器布放深度0.50 m。试验时用水盆在水面划水,造成水面波动,增强信道时变性。传输数据结构同仿真。
水箱信道图如图8 所示,其中横轴表示时域抽头数,纵轴表示归一化幅度,对比图5 可知水箱信道具有强多途干扰。发射、接收信号如图9 所示,船舶噪声干扰下的接收信号如图9(c)所示。对比图9(b)可知船舶噪声干扰强。

图8 水箱信道Fig.8 Water tank channel

图9 水箱试验Fig.9 Water tank test
由于收发节点距离近,环境噪声影响小,所以加入随机高斯白噪声,获得信噪比1~15 dB的接收信号。采用所提算法,处理带船舶噪声的接收信号,平均误码率如图10 所示,横轴代表信噪比,纵轴代表DQPSK100 组水箱试验的平均误码率,随着信噪比增大,误码率逐渐降低。信噪比为15 dB 时,100 组几乎全部正确解码。水箱试验证明了所提算法适用于船舶噪声和时变多途干扰下的可靠水声通信。
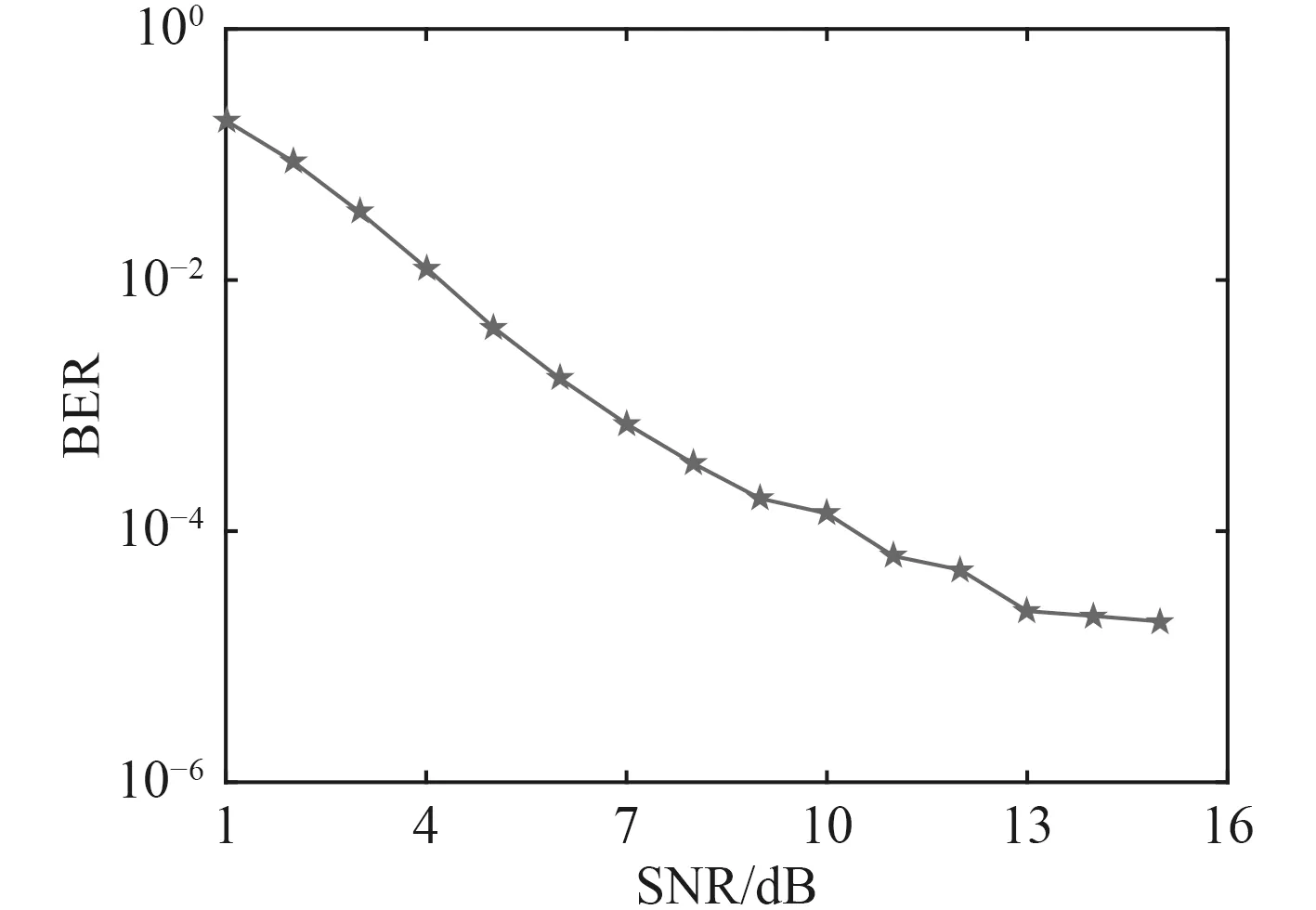
图10 平均误码率Fig.10 Average BERs
5 结语
本文提出DE-OFDM 算法,采用信道卷积编码和差分编码有效消除了船舶噪声和时变强多途干扰,基于循环前缀技术以及OFDM 通信技术固有的抗多途特性,有效消除了时变多途干扰。南海实测信道仿真和水箱试验结果表明,所提算法可有效解决船舶噪声和时变多途干扰问题,实现可靠水声通信,可为船舶噪声干扰下的海洋运动水声通信奠定基础。
