基于视频监控的智能抄表技术研究
2021-09-17李学
李 学
(中海油信息科技有限公司,广东 深圳 518000)
0 引言
仪器仪表作为石油石化行业生产系统的终端单元,是工作人员监测生产系统运行状态的“眼睛”,数据的实时性和准确性起关键的作用[1]。目前在石油石化行业,一些仪器仪表并没有提供与计算机进行数据通信的接口,仪表抄表仍然使用传统的人工抄表的方法,不可避免会存在以下问题。1)实时性差:石油石化生产系统占地面积普遍较大,而仪表的位置大多情况下分布较远,人工抄表是依靠工作人员前往仪表现场抄表,完成一次全部抄表需要很长时间,仪表数据的实时性较差。2)误差大:人工抄表得到的结果易受多种因素影响,例如人眼的观测距离、观测角度、长期重复性工作所带来的视觉疲劳、视力下降以及抄表人员的工作认真态度等,这些主观、客观因素会对抄表结果带来误差。3)效率低:人工抄表的工作效率极低,难以满足当前大量仪表需要抄表的要求,并且人眼观察能力有限,人工抄表的精度低。4)人力成本高:人工抄表技术含量较低,但需要占用大量时间和精力,如遇须实时监控仪表数据的情况时,则需要工作人员在生产现场值守,人力成本高。5)人员安全风险:在石油石化行业,仪器仪表大多部署在防爆区域,易产生有毒有害气体,对工作人员的身体健康及生命安全造成危害。
因此,需要寻找一种高效准确的抄表方法,来解决上述问题。近些年,随着模式识别、人工智能、图像处理理论的飞速发展,计算机视觉的应用研究进展迅速,目前已成了一个相当活跃的研究领域,并且具有广泛的应用前景。同时,网络视频监控在石油石化行业生产单位中已成为重要的基础设施,几乎每个生产系统中都已建设了视频监控系统,将计算机视觉技术结合视频监控系统,应用于仪表自动抄表是一种十分有效的方法,同时可以为企业节约人力成本。
1 需求分析
针对石油石化行业某终端处理厂对主装置区、脱碳区日常巡检要求,提高巡检效率、降低人员巡检难度,设计建设一套智能抄表系统,通过对需求的分析归纳,总结了以下7点需求:1)对终端处理厂内的指针式仪表和数显Led仪表,系统能够自动读识仪表数据。2)单台摄像机能够识别多个仪表数据。3)针对存在部分遮挡和非线性畸变的仪表,须有较高的准确率。4)在系统监控界面可以预览全部仪表的实时数据和告警提示,对任意仪表,可以使用鼠标点击查看详细信息,包括当前数据值、报警阈值的上限和下限值。5)系统能够查看仪表的报警记录,包括时间、仪表名称、报警信息、仪表照片、处理记录和操作员。6)系统定时采集仪表数据并整理归纳,能够按照人工巡检抄表的报表模板自动生成巡检记录。7)系统能够查看任意仪表的历史数据,能够按照历史数据查询的起始和结束时间自动形成曲线图,便于工作人员分析处置。
2 实现原理
仪表读数自动识别过程中最重要的环节为仪表读数自动判别,为实现自动化抄表的目标,现在大多通过计算机视觉的方式实现仪表读数的自动判别。计算机视觉是一种非接触式的感知方式,通过光学成像器件获取观察对象的图像,并对真实环境的图像进行解释,从而得到信息结果。研究计算机视觉技术的目的是通过机器去观测与分析图像,期望达到模拟人眼识别的效果,同时利用机器不会产生类似于人的疲劳问题,达到高效巡检的目的。该文主要通过摄像机拍摄仪表的实时图像,通过光缆将图像发送至智能抄表系统,智能抄表系统对图像进行预处理,通过相关组合算法对图像特征进行提取和识别,获得当前仪表的读数,将读数值显示在智能抄表系统中,并进行自动保存如图1 所示[2]。
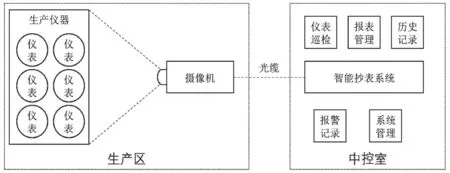
图1 实现原理介绍
3 系统设计
3.1 系统设计
3.1.1 读数过程设计
系统读数过程设计(图2):1)图像采集。通过视频监控系统的摄像机拍摄仪表的表盘图像;2)图像预处理。将采集的图像进行仪表图像倾斜校正、图像去噪、图像的形体学处理和图像二值化处理,得到较清晰的表盘。3)图像特征提取。对预处理后的图像进行特征分析、定位分割和数字特征提取。图像特征分为仪表盘特征和数据特征,仪表盘特征提取训练用以识别并定位仪表,数据特征则用于智能识别仪表刻度数据。4)读数识别。系统仪表分模拟仪表和数字仪表2种,其读数识别方法和技术也不相同。模拟仪表:将指针仪表的指针角度转换为数值; 数字仪表:将数显LED仪表的数字图像做图片文字识别(OCR 识别),并转换为数值。5)读数录入。进行系统字体识别,并将识别的仪表数据按指定格式和精度存入数据库系统。6)数据展示。在系统中能够查询、显示读取的仪表数据,支持历史数据查询、报表统计和图表展示。

图2 系统读数过程设计
3.1.2 系统硬件设计
3.1.2.1 系统硬件架构
系统主要由前端采集子系统、网络传输子系统和后端识别子系统组成,如图3所示。
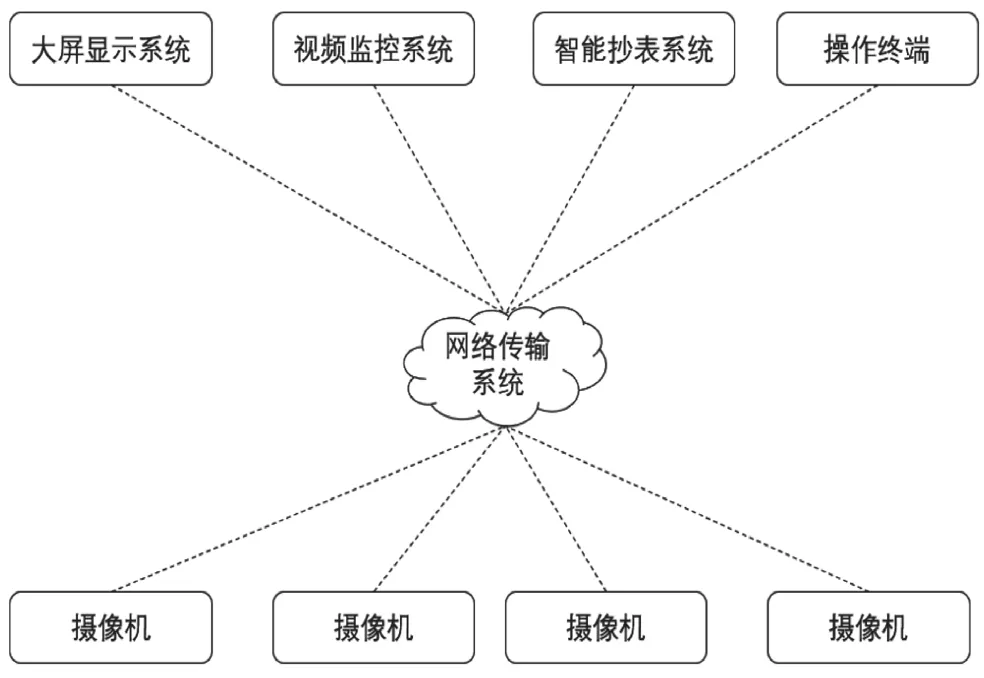
图3 系统硬件架构图
3.1.2.2 前端采集子系统
(1)从系统综合能效比来看,相比于加装中间换热器的地下水源热泵系统,地埋管地源热泵系统具有较大的优势,空气源热泵系统次之,由此可知,加装中间换热器的地下水源热泵系统作为该项目的冷热源方案是最不节能的。
前端采集子系统主要是在终端处理厂主装置区、脱碳区的生产系统仪表安装部署的视频监控系统,抄表系统利用通信接口协议控制摄像机对准仪表,拍摄仪表表盘照片,实现对仪表数据的采集。
3.1.2.3 网络传输子系统
终端处理厂预埋光纤,通过网络把摄像机拍摄到的仪表实时视频传至中控室,后端识别子系统部署在中控室机房,使中控室能实时了解现场情况,并对视频图像进行处理、分析和识别。
3.1.2.4 后端识别子系统
后端识别子系统为整个仪表识别系统的核心,包括智能分析服务器、中心管理服务器、监控工作站和大屏显示系统。智能分析服务器可以对仪表照片进行预处理、分析、识别和读取仪表的数据,并存储入数据库系统;同时,智能分析服务器还支持训练样本更新,再训练再学习,支持模型自动更新。
3.1.3 系统软件设计
3.1.3.1 总体框架
系统总体软件框架设计,如图4所示。1)应用层。应用层采用模块化设计,按照使用习惯定义,包括仪表巡检界面一张图、报表自动生产、历史数据变化趋势、系统管理和报警管理。2)存储层。对图像智能识别结果进行关系型数据、非结构化数据存储,通过分库分表技术,大幅度提升了系统的吞吐量及系统稳定性,对高频繁访问数据进行Redis缓存,提升系统访问数据速度。3)传输层:系统各层间通信和数据传输基于消息队列遥测传输协议(MQTT),采用分布式消息队列Kafka和AMQ方式进行。分布式消息队列以生产者/消费者模式运作,生产者往指定的消息队列插入消息,消费者实时监听队列消息。4)感知层。在感知层可以接入视频并且通过视频智能分析提取视频有用信息。
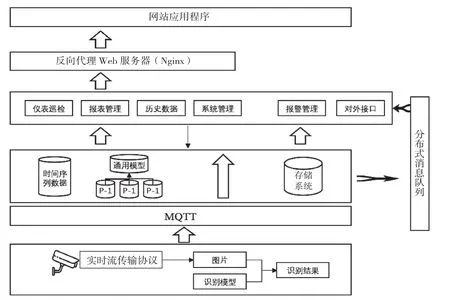
图4 软件框架图
3.1.3.2 软件功能设计
3.1.3.2.1 仪表巡检
某陆地终端处理厂所涉及的50个仪表,按照仪表真实的位置布局还原,最大程度上还原工作人员的巡查习惯。
3.1.3.2.2 报表管理
某陆地终端处理厂所涉及的50个仪表,按照仪表巡检表模板定制报表管理功能,系统可按照现有巡检模板自动生成巡检报告单。
3.1.3.2.3 历史数据
生产系统运行过程中,仪表记录的大量数据存储到中系统,巡检人员自定义起始/结束时间,根据仪表数据的变化趋势识别有用信息并做出相应的正确预测。
3.1.3.2.4 报警记录
当采集的仪表数据超过设置的上限或下限值时,系统自动识别为报警记录,并在右上角发出报警提示,用户可单击查看报警详细信息和记录照片,并做人工确认。
3.1.3.2.5 系统管理
系统管理包括仪表配置、摄像机预置位配置、设备信息配置、数据模型管理以及用户及权限配置等。
3.2 关键技术研究
3.2.1 仪表存在阴影或局部遮挡的情况
针对光照阴影的情况,通过光照平衡算法对采集图像进行处理;针对存在立杆局部遮挡仪表表盘的情况,扩大仪表的数据集并通过图像还原算法优化采集仪表图像,以提高仪表识别率和准确度。系统在安装摄像头阶段已经考虑过遮挡情况,不存在完全遮挡仪表或仪表指针的情况,因此指针刻度完全可通过图像还原算法计算得出。
3.2.2 非线性畸变校准
对摄像机部署安装角度无法垂直于仪表表盘的情况,扩大仪表的数据集并通过非线性畸变校准算法对仪表图像进行三维对齐,以提高仪表识别率和准确度。实现非线性畸变,须预先对标准角度的仪表盘进行建模,然后将非垂直角度的仪表图片映射到标准模型,以此得到垂直角度的仪表图片。图像在三维对齐过程中,仪表盘和仪表指针做的非线性畸变是完全相同的,所以对齐后的指针刻度高度可信。
3.2.3 一机多表
一机多表是指针对1台摄像机需要识别多个仪表,通过图像建模建立仪表盘模型,识别图中多个仪表,进而读取每个仪表刻度数据。一机多表同样存在仪表表盘与摄像头角度不垂直的情况,一机多表在读取仪表数据时同样需要进行三维对齐处理。另外系统维护人员会将摄像头位置和仪表位置录入系统,用以验证一机多表情况下读取的仪表数据个数是否匹配。
3.2.4 模型自动更新
系统在设计阶段设计并训练了大量数据模型用于模式识别,这些初始模型采用的训练样本都是预先采集的,样本数量有限且多为常规样本,初始模型的识别能力有限,特别是针对非常规图像的情况,例如遮挡位置或者偏斜角度未在训练样本中出现过。系统在运行过程中运维人员也会对识别结果适当进行人工干预,对识别数据进行校正。这些校正后的样本会再次进入样本库,数据模型会对新产生的结果和人工修正后的样本进行再训练再学习,自动更新和升级模型。因此,系统运行越久,训练样本越多,识别能力越强。
3.3 测试记录
基于上述外部条件和训练模型,在肉眼可辨的条件下进行测试,测试100次,次数记录见下表1,人工抄表及智能抄表对比见下表2。
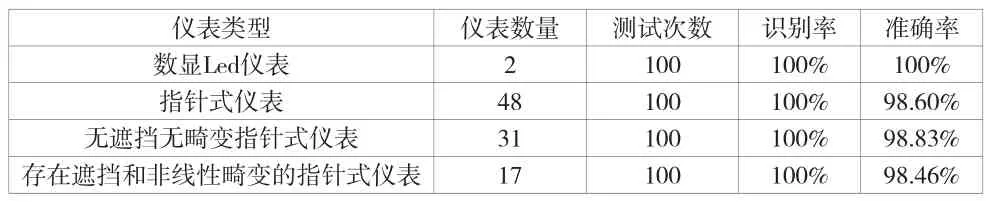
表1 测试情况记录表
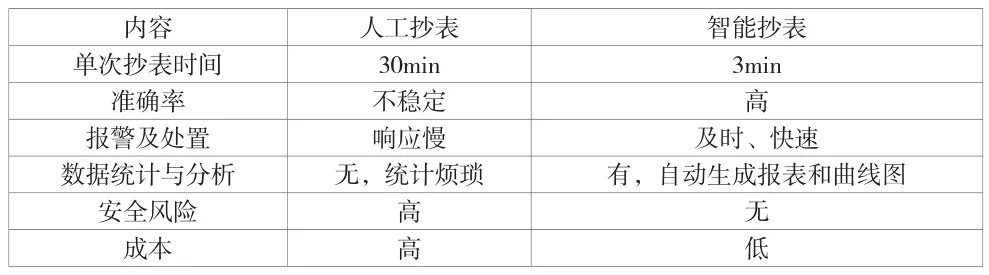
表2 人工抄表与智能抄表的对比
准确率为系统读数识别精度控制在±5%以内(±a%=(ΔXm/Xm)×100%),其中,ΔXm为最大绝对误差,Xm为仪表的基本量程。
4 结论
在石油石化行业中,基于现有视频监控系统的智能抄表技术研究,该文有效地结合生产系统中视频监控系统和智能图像识别技术,将图像识别智能抄表技术首次应用在石油石化行业,并且实现了一机多表、非线性畸变和部分遮挡等复杂情况下仪表数据的准确识别。显著提升了仪表数据的及时性,降低了现场巡检的工作难度和安全风险,改善了巡检人员的工作环境,实现人工抄表向智能抄表的跨越。
此外,在研究过程中,发现摄像机被环境、光线因素影响较大,存在无法自动对焦导致画面模糊而无法识别仪表数据的情况,后续在推广应用时,可针对画面模糊的仪表采用AI智能数据分析算法,有效推算出当前仪表数值。
